一种小车及车底检测机器人的制作方法
本发明属于轨道列车检测设备,特别是涉及一种小车及车底检测机器人。
背景技术:
1、传统的停车静态检测是通过人工的方式进行检测,列车需要在专业的场地上停驶检测,在检测时,工作人员进入检修地沟并用敲击的方法来判断零部件是否受损,导致检测的效率低且误差高。随着科技的发展,在市面上出现了车底检测机器人,利用相机等工具对车底进行检测,能够有效地减小检测的误差、节省人力和节省时间。
2、目前,由于车底检测机器人需要进入检修地沟进行工作,而检修地沟又有一米多深,所以要么人工将车底检测机器人放入检修地沟中,要么使检修机器人具备上、下楼梯或斜坡的能力。现有技术中存在一种履带式车底检测机器人(例如授权公告号为cn218976771u的实用新型专利),包括承载装置和固定设置在承载装置两侧的倒梯形履带行走装置,通过倒梯形履带行走装置能够上、下楼梯或斜坡,但这种履带式车底检测机器人不具有机械臂式机器人,不能全方位地拍摄车底的图像;现有技术中还存在一种车底检测机器人(例如授权公告号为cn 217072397 u的实用新型专利),具备机械臂式机器人,但不能上、下楼梯或斜坡。综上所述,现有技术中不存在一种能够同时具备机械臂式机器人和上、下楼梯或斜坡能力的车底检测机器人,这是因为如果在承载装置上设置机械臂式机器人,在机械臂式机器人远离承载装置的一端上设置用于拍摄列车底部的相机,会导致在上、下楼梯或斜坡时,承载装置的上表面倾斜,进一步会导致设置在承载装置上表面上的机械臂式机器人和相机发生倾斜,车底检测机器人将会翻倒,从而导致现有技术中的车底检测机器人不能同时具备上、下楼梯或斜坡的能力和机械臂式机器人。
技术实现思路
1、本发明的目的在于提供一种小车及车底检测机器人,以解决现有技术中包含机械臂式机器人的车底检测机器人在上、下楼梯或斜面时,由于承载装置倾斜而导致车底检测机器人翻倒的技术问题。
2、为实现上述目的,本发明所提供的小车的技术方案是:
3、一种小车,包括承载装置和设置在承载装置两侧的至少两个行走装置,行走装置包括行走装置支架,所述小车还包括用于调节承载装置与行走装置支架之间的夹角的仰角调节机构和用于驱动仰角调节机构运动的驱动装置,所述驱动装置能够通过驱动仰角调节机构调节承载装置与行走装置支架之间的夹角。
4、有益效果为:本发明为改进性发明创造。通过仰角调节机构和驱动装置能够使承载装置在上、下斜坡或台阶时保持水平,从而避免承载装置和位于承载装置上方的其他结构的重心偏移,防止小车发生侧翻。
5、更进一步地,在承载装置和一个行走装置支架间至少设有两个仰角调节机构。
6、有益效果为:通过设置多个仰角调节机构,增加了行走装置和承载装置的连接部位,从而能够更加稳定地调节承载装置与行走装置支架之间的夹角。
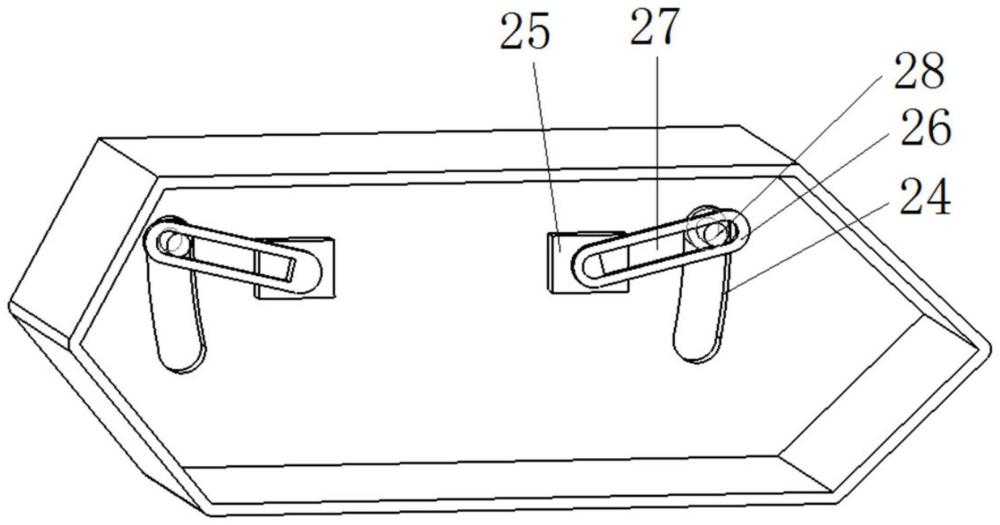
7、更进一步地,所述承载装置包括壳体,所述驱动装置设置在壳体内,所述仰角调节机构包括连接杆和位于壳体内的摇杆,在壳体与行走装置接触的两个侧面上均设有贯穿壳体的第一滑槽,所述连接杆的一端从第一滑槽伸出壳体后与行走装置支架连接,所述连接杆的另一端与摇杆连接,所述摇杆远离连接杆的一端与驱动装置固定连接。
8、有益效果为:通过设置第一滑槽、连接杆和摇杆,能够方便地通过位于壳体内的驱动装置控制承载装置与行走装置支架之间的夹角。
9、更进一步地,所述摇杆上开设有第二滑槽,所述连接杆位于壳体内的一端沿第二滑槽可滑动地设置在第二滑槽内。
10、有益效果为:通过在摇杆上设置第二滑槽,可以使摇杆在旋转时不受第一滑槽的形状和连接杆的影响,能够将第一滑槽设为除以驱动装置的输出端为圆心的圆弧外的其他形状,从而使驱动装置不必非要设置在壳体侧壁的中心位置,而是能够设置在壳体内的任何位置。
11、更进一步地,所述驱动装置为步进电机或伺服电机。
12、有益效果为:步进电机和伺服电机能够将承载装置与行走装置支架之间的夹角调节为任意角度,从而使小车适应不同坡度的斜坡和楼梯;同时,步进电机和伺服电机能够控制自身是否转动,从而使承载装置与行走装置支架之间保持相对固定。
13、更进一步地,所述行走装置为履带式行走装置,所述履带外侧设有防滑肋,所述行走装置支架上连接有用于驱动履带转动的驱动电机。
14、有益效果为:通过将行走装置设为履带式行走装置并设置防滑肋,能够便于行走装置上、下楼梯。通过将驱动行走装置运动的驱动电机设置在行走装置上,而不是将驱动电机设置在承载装置上,能够使驱动电机不受承载装置与行走装置支架的影响,在承载装置与行走装置支架之间的夹角为任意角度时都能够驱动履带转动。
15、为实现上述目的,本发明所提供的车底检测机器人的技术方案是:
16、一种车底检测机器人,包括小车和设置在小车上的机械臂式机器人,小车包括承载装置和设置在承载装置两侧的至少两个行走装置,行走装置包括行走装置支架,所述小车还包括用于调节承载装置与行走装置支架之间的夹角的仰角调节机构和用于驱动仰角调节机构运动的驱动装置,所述驱动装置能够通过驱动仰角调节机构调节承载装置与行走装置支架之间的夹角,车底检测机器人还包括用于控制小车的控制装置。
17、有益效果为:本发明为改进性发明创造。通过仰角调节机构和驱动装置能够使承载装置在上、下斜坡或台阶时保持水平,从而避免承载装置和位于承载装置上方的其他结构的重心偏移,防止小车发生侧翻。
18、更进一步地,在承载装置和一个行走装置支架间至少设有两个仰角调节机构。
19、有益效果为:通过设置多个仰角调节机构,增加了行走装置和承载装置的连接部位,从而能够更加稳定地调节承载装置与行走装置支架之间的夹角。
20、更进一步地,所述承载装置包括壳体,所述驱动装置设置在壳体内,所述仰角调节机构包括连接杆和位于壳体内的摇杆,在壳体与行走装置接触的两个侧面上均设有贯穿壳体的第一滑槽,所述连接杆的一端从第一滑槽伸出壳体后与行走装置支架连接,所述连接杆的另一端与摇杆连接,所述摇杆远离连接杆的一端与驱动装置固定连接。
21、有益效果为:通过设置第一滑槽、连接杆和摇杆,能够方便地通过位于壳体内的驱动装置控制承载装置与行走装置支架之间的夹角。
22、更进一步地,所述摇杆上开设有第二滑槽,所述连接杆位于壳体内的一端沿第二滑槽可滑动地设置在第二滑槽内。
23、有益效果为:通过在摇杆上设置第二滑槽,可以使摇杆在旋转时不受第一滑槽的形状和连接杆的影响,能够将第一滑槽设为除以驱动装置的输出端为圆心的圆弧外的其他形状,从而使驱动装置不必非要设置在壳体侧壁的中心位置,而是能够设置在壳体内的任何位置。
24、更进一步地,所述驱动装置为步进电机或伺服电机。
25、有益效果为:步进电机和伺服电机能够将承载装置与行走装置支架之间的夹角调节为任意角度,从而使小车适应不同坡度的斜坡和楼梯;同时,步进电机和伺服电机能够控制自身是否转动,从而使承载装置与行走装置支架之间保持相对固定。
26、更进一步地,所述行走装置为履带式行走装置,所述履带外侧设有防滑肋,所述行走装置支架上连接有用于驱动履带转动的驱动电机。
27、有益效果为:通过将行走装置设为履带式行走装置并设置防滑肋,能够便于行走装置上、下楼梯。通过将驱动行走装置运动的驱动电机设置在行走装置上,而不是将驱动电机设置在承载装置上,能够使驱动电机不受承载装置与行走装置支架的影响,在承载装置与行走装置支架之间的夹角为任意角度时都能够驱动履带转动。
28、更进一步地,机械臂式机器人为六轴机械臂式机器人,所述六轴机械臂式机器人的每一轴处均设有用于控制每一轴单独运作的控制电机,所述六轴机械臂式机器人的一端安装在壳体上部,另一端上设有图像采集装置。
29、有益效果为:通过六轴机械臂式机器人能够将图像采集装置移动到任意位置和将图像采集装置倾斜任意角度,从而实现各种角度的图像采集。
30、更进一步地,所述图像采集装置包括用于采集损坏部位图像的面阵相机、用于切换相机工作状态的转换器和3d相机,所述3d相机和面阵相机均设置在转换器上,所述图像采集装置具有使3d相机工作以寻找损坏部位的第一工作状态和使面阵相机采集损坏部位图像的第二工作状态。
31、有益效果为:通过设置转换器能够随时切换相机;3d相机能够返回三维坐标,通过三维坐标进行视觉引导精确定位到所要拍摄图片的位置,能够解决列车小车变化导致拍摄不清晰的现象,同时,3d相机还不会受光照条件,颜色灰度的影响,具备精度高、视野大、扫描速度快的优点,能够精准的定位;3d相机还能够随机械臂式机器人移动,从而更加精准的定位,最终能够使面阵相机拍摄的图片更加清晰。
32、更进一步地,所述控制装置具有控制车底检测机器人按照特定路线运行并每隔固定距离执行一次拍摄工作的控制状态,在控制状态中,所述控制装置能够控制图像采集装置切换第一工作状态和第二工作状态。
33、有益效果为:通过控制装置能够控制车底检测机器人处于控制状态,从而使车底检测机器人在无需工作人员的条件下进行全自动拍摄,工作人员只需要根据车底检测机器人拍摄的数据确定车底是否存在缺陷即可,同时,车底检测机器人不需要休息,能够节省人力和时间成本。
- 还没有人留言评论。精彩留言会获得点赞!