车辆控制方法、车辆控制系统和存储介质与流程
本技术涉及汽车电子,特别是涉及一种车辆控制方法、车辆控制系统、存储介质和计算机程序产品。
背景技术:
1、传统的车辆控制往往采用转向机双冗余控制机构实现转向控制。车辆控制方法通过右转向机齿轮齿条机构和左转向机齿轮齿条机构分别与两个前半轴上的车轮机械连接,转向系统控制器通过控制电路分别与右转向机驱动电机、左转向机驱动电机连接。然而,这种采用两套独立机械转向机构来实现转向控制,占用车辆底盘空间较大、成本较高,且存在双电机执行控制不同步的安全风险。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高车辆控制安全性的车辆控制方法、车辆控制系统、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种车辆控制方法,应用于车辆控制系统,车辆控制系统包括车辆控制器、总线控制器、多绕组电机和至少一个车轮;其中,总线控制器中集成多路总线;多绕组电机中集成多套绕组线圈;多路总线和多套绕组线圈一一对应连接,构成多条控制线路;每条控制线路均与至少一个车轮连接;方法包括:
3、车辆控制器获取方向盘转角扭矩、多条控制线路的线路状态和驾驶状态;根据各线路状态,在多条控制线路中确定出目标控制线路;在驾驶状态为自动驾驶状态,且方向盘转角扭矩小于等于预设标定扭矩的情况下,获取雷达数据和图像数据;基于雷达数据和图像数据,确定转角控制值,将转角控制值发送至总线控制器;
4、总线控制器根据转角控制值,确定转向驱动力,控制目标控制线路中的目标绕组线圈输出转向驱动力,带动至少一个车轮运动。
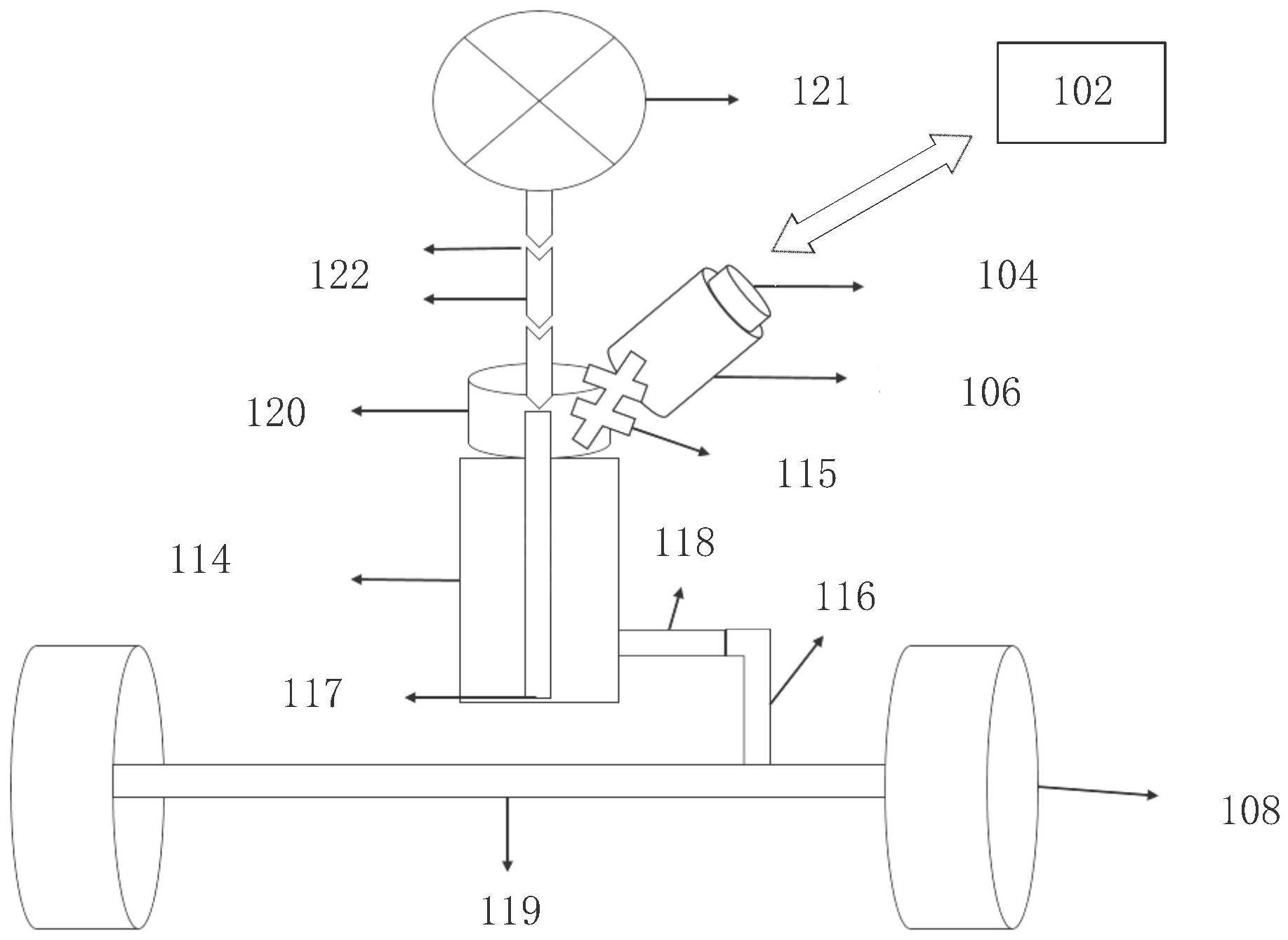
5、在其中一个实施例中,车辆控制系统还包括转向机、传动设备和拉杆;转向机包括输入轴和输出轴;多绕组电机通过传动设备与转向机的输入轴连接;转向机的输出轴通过拉杆与至少一个车轮连接;
6、控制目标控制线路中的目标绕组线圈输出转向驱动力,带动至少一个车轮运动,包括:
7、总线控制器控制目标控制线路中的目标绕组线圈输出转向驱动力,以使传动设备在转向驱动力的作用下传动,输入轴在传动设备的带动下转动,输出轴在输入轴的带动下转动,拉杆在输出轴的带动下转动;至少一个车轮在拉杆的带动下运动。
8、在其中一个实施例中,根据各线路状态,在多条控制线路中确定出目标控制线路,包括:
9、车辆控制器在多条控制线路中确定出线路状态为正常状态的至少一条候选控制线路;
10、根据各候选控制线路各自对应的优先级,在至少一条候选控制线路中确定出目标控制线路。
11、在其中一个实施例中,车辆控制系统还包括扭矩传感器和方向盘;扭矩传感器与方向盘连接,扭矩传感器用于采集方向盘的方向盘转角扭矩;方法还包括:
12、车辆控制器在方向盘转角扭矩大于预设标定扭矩的情况下,或者,在驾驶状态为手动驾驶状态的情况下,检测方向盘转角扭矩小于等于预设标定扭矩的持续时长;在持续时长处于预设持续时长内的情况下,获取方向盘的目标转角,并将目标转角发送至总线控制器;
13、总线控制器根据目标转角控制至少一个车轮运动。
14、在其中一个实施例中,方向盘通过目标控制线路与至少一个车轮连接;根据目标转角控制至少一个车轮运动,包括:
15、总线控制器查询预设映射表,确定与目标转角对应的目标驱动力;
16、控制目标控制线路中的目标绕组线圈输出目标驱动力,带动至少一个车轮运动。
17、在其中一个实施例中,车辆控制方法还包括:
18、车辆控制器在驾驶状态为手动驾驶状态,且持续时长超过预设持续时长的情况下,确定驾驶状态为自动驾驶状态,并返回获取转角控制值的步骤继续执行。
19、第二方面,本技术还提供了一种车辆控制装置,应用于车辆控制系统,车辆控制系统包括车辆控制器、总线控制器、多绕组电机和至少一个车轮;其中,总线控制器中集成多路总线;多绕组电机中集成多套绕组线圈;多路总线和多套绕组线圈一一对应连接,构成多条控制线路;每条控制线路均与至少一个车轮连接;装置包括:
20、第一控制模块,用于车辆控制器获取方向盘转角扭矩、多条控制线路的线路状态和驾驶状态;根据各线路状态,在多条控制线路中确定出目标控制线路;在驾驶状态为自动驾驶状态,且方向盘转角扭矩小于等于预设标定扭矩的情况下,获取雷达数据和图像数据;基于雷达数据和图像数据,确定转角控制值,将转角控制值发送至总线控制器;
21、第二控制模块,用于总线控制器根据转角控制值,确定转向驱动力,控制目标控制线路中的目标绕组线圈输出转向驱动力,带动至少一个车轮运动。
22、第三方面,本技术还提供了一种车辆控制系统,车辆控制系统包括:车辆控制器、总线控制器、多绕组电机和至少一个车轮;其中,总线控制器中集成多路总线;多绕组电机中集成多套绕组线圈;多路总线和多套绕组线圈一一对应连接,构成多条控制线路;每条控制线路均与至少一个车轮连接;车辆控制器用于获取方向盘转角扭矩、多条控制线路的线路状态和驾驶状态;根据各线路状态,在多条控制线路中确定出目标控制线路;在驾驶状态为自动驾驶状态,且方向盘转角扭矩小于等于预设标定扭矩的情况下,获取雷达数据和图像数据;基于雷达数据和图像数据,确定转角控制值,将转角控制值发送至总线控制器;总线控制器根据转角控制值,确定转向驱动力,控制目标控制线路中的目标绕组线圈输出转向驱动力,带动至少一个车轮运动。
23、在其中一个实施例中,车辆控制系统还包括转向机、传动设备和拉杆;转向机包括输入轴和输出轴;多绕组电机通过传动设备与转向机的输入轴连接;转向机的输出轴通过拉杆与至少一个车轮连接;总线控制器还用于控制目标控制线路中的目标绕组线圈输出转向驱动力,以使传动设备在转向驱动力的作用下传动,输入轴在传动设备的带动下转动,输出轴在输入轴的带动下转动,拉杆在输出轴的带动下转动;至少一个车轮在拉杆的带动下运动。
24、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
25、获取方向盘转角扭矩、多条控制线路的线路状态和驾驶状态;根据各线路状态,在多条控制线路中确定出目标控制线路;在驾驶状态为自动驾驶状态,且方向盘转角扭矩小于等于预设标定扭矩的情况下,获取雷达数据和图像数据;基于雷达数据和图像数据,确定转角控制值,将转角控制值发送至总线控制器;
26、根据转角控制值,确定转向驱动力,控制目标控制线路中的目标绕组线圈输出转向驱动力,带动至少一个车轮运动。
27、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
28、获取方向盘转角扭矩、多条控制线路的线路状态和驾驶状态;根据各线路状态,在多条控制线路中确定出目标控制线路;在驾驶状态为自动驾驶状态,且方向盘转角扭矩小于等于预设标定扭矩的情况下,获取雷达数据和图像数据;基于雷达数据和图像数据,确定转角控制值,将转角控制值发送至总线控制器;
29、根据转角控制值,确定转向驱动力,控制目标控制线路中的目标绕组线圈输出转向驱动力,带动至少一个车轮运动。
30、上述车辆控制方法、车辆控制系统、存储介质和计算机程序产品,通过总线控制器和多绕组电机构成多条独立的控制线路,在车辆控制过程中,可以根据各控制线路的线路状态,确定出对车辆进行控制的目标控制线路。这种系统组成占用车辆空间较小,同时,总线控制器通过接收车辆控制器基于雷达数据和图像数据处理后得到的转角控制值,控制目标控制线路中的目标绕组线圈输出转向驱动力,从而带动至少一个车轮运动,这种通过一条目标控制线路实现车辆控制,无需同步控制,安全性高。
- 还没有人留言评论。精彩留言会获得点赞!