一种工程机械转向控制方法及控制系统与流程
本发明涉及一种工程机械转向控制方法及控制系统,属于工程机械转向控制。
背景技术:
1、工程机械是指用户在施工工程中使用的各种机械设备,其在行驶和作业中,需要利用转向系统保持直线行驶或改变其行驶方向。由于这些设备平时通常工作在极端恶劣的环境中,常见的工作场景包括坚硬的石块、泥泞、高温或严寒等,工程机械动力转向系统的基本要求是操纵轻便灵活,工作稳定可靠。转向性能是保证工程机械安全行驶、降低操作员劳动强度,提高作业效率的主要因素,它是工程机械的一个重要性能指标,
2、工程机械在作业过程中动作频繁,工况复杂,随着电子技术的不断发展以及人们对作业效率和操控舒适性要求的提高,工程机械的转向形式已逐渐由机械式发展为全液压转向再到现在越来越广泛应用的电控液压动力转向。转向控制是工程机械施工过程中一个非常重要的动作,它的安全性主要包括两个方面,一方面是操作者的人身安全,另一方面是机械本身的完好性和稳定性。而这两个方面的安全性又是相互关联的,操作者如果对设备的操控不当,会进一步影响到设备的完好性和稳定性。在转向过程中驾驶员可能会因为控制操作不慎而导致事故发生,同时,由于环境因素的影响,如地面湿滑等,容易发生转向失控、掉头不及等情况,给人员和设备带来风险,使得转向控制的稳定性和可靠性受到限制,因此符合功能安全要求的工程机械转向控制方法和系统应运而生。
3、现有技术中,专利201210069223.4提供了一种工程机械及其转向控制方法、转向控制系统,该方法能够根据驾驶员的意图提供转向功能支持,然而并未考虑转向系统失效和/或驾驶员操作不慎导致事故的风险,也未考虑环境因素引起的转向故障概率的问题,安全性设计未提及,转向系统一旦失效,整个转向系统就会发生与驾驶员意图不符的情况,将直接危害车辆的行驶和驾驶员的人身安全。
4、专利201810162199.6提供了一种工程机械液压转向控制系统,该方法仅对转向的转速信号进行检测和信号处理,信号输出模块对信号进行比较输出,报警提示模块用来进行报警提示。但是并未明确说明输出模块和报警提示模块的工作过程,整个系统的安全作用只是报警提示,诊断覆盖率低,无法解决系统可能产生的安全问题和如何进入安全状态。
5、专利202110761937.0提供了一种电控转向系统控制电路、控制方法及存储介质,该方法设计两套控制电路、两个电机和电机位置检测模块、两路供电及电源管理模块、两路驱动模块,该设计使得系统整体制造成本较高,安装尺寸较大,在整车设计和布置上存在诸多限制和困难。当一套系统失效后,需要立即切换到另一套系统。额外的一套控制回路甚至有增加系统故障风险的隐患,反而与设计初衷相悖,不适用于工程机械行业的应用。
6、专利202011501357.x公开了一种高度冗余电动助力转向系统的控制器电路及控制方法,该方法涉及一种高度冗余的电动助力转向系统,同样存在使得系统整体制造成本较高、安装尺寸较大的问题,在市场竞争中缺乏价格优势,占用较大设计空间,虽然设计的目的是为了安全考虑,但是额外的电气设备增加了故障机会,使维护成本增加。从安全角度上讲,当一套系统的某个模块或部件发生故障后,要立即把信息传递到该控制器,控制器确认故障属实后,再向另一套系统发出启动命令,备用系统启动开始工作,整个切换过程需要快速准确,对两套系统的性能要求明显较高,设计比较复杂。
7、专利202210607873.3公开了一种车辆转向控制方法、控制装置及工程车辆,该方法解决了推土机等土方机械设备转弯半径不稳定,在多工况作业条件时,转向操控性能不全面,控制精度不高的问题。但是并未考虑控制模块失效或者非预期的转向故障而发生危险的情况,导致故障状态下可能存在危害人身安全的风险。
8、工程机械智能化使电子电气器件得到了大范围应用,现阶段针对工程机械整车层面转向系统的功能安全技术是领域内的一个短板,对于电子电气系统而言,做到安全不发生故障是不可能的,所以需要对转向系统进行功能安全设计,保证系统发生故障以后工程机械不发生安全事故,它工程机械非常重要的一部分,因此研究工程机械转向系统功能安全,提高转向系统安全性,从而保证车辆在行驶和转向系统发生故障前或故障后通过相应的安全控制措施来保证驾驶员和周围人员及车辆的生命财产安全,意义重大,如何确保在发生单点或有限多点失效时转向系统仍是安全的,是当下非常需要解决的问题。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种工程机械转向控制方法及控制系统,解决转向系统的安全性问题,降低系统开发成本;有效提升操作者的工作效率,同时确保设备的安全性和稳定性,还能确保系统的整体安全性和转向性能。
2、为达到上述目的,本发明是采用下述技术方案实现的:
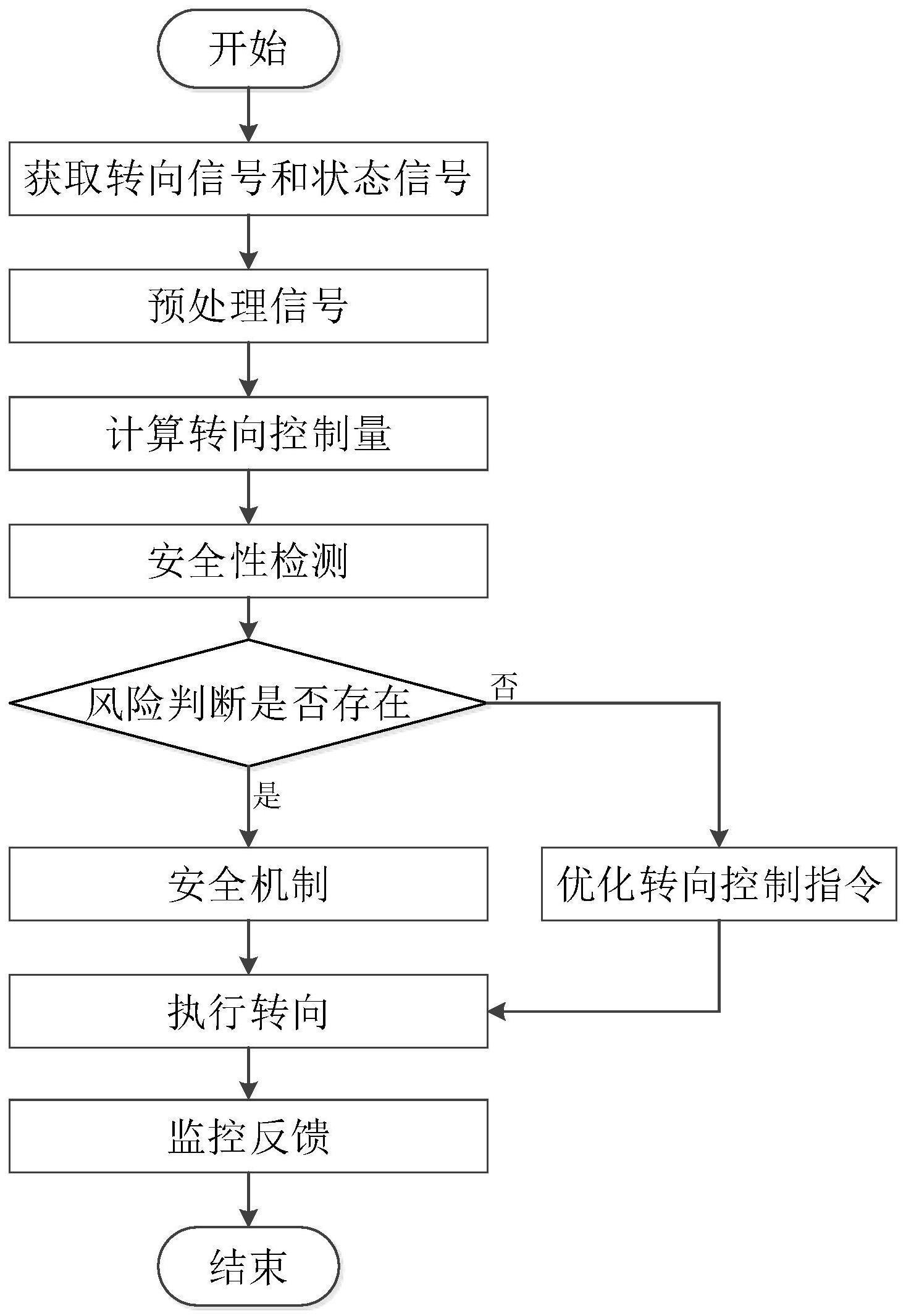
3、第一方面,本发明提供了一种工程机械转向控制方法,包括:
4、获取工程机械的转向操作信号和运行状态信号;
5、基于获取的转向操作信号和运行状态信号,以及预设的转向参数,计算出转向控制量;
6、对转向控制量和控制系统进行安全性检测,判断当前转向操作是否存在高风险操作;
7、根据安全性检测结果,输出不同的转向控制选项;
8、根据选择的转向控制选项调整工程机械的转向。
9、进一步的,所述转向操作信号包括转向角度、转向速度等;状态信号包括但不限于车辆运行速度、前进方向和扭矩等。
10、进一步的,所述方法还包括,对转向操作信号和状态信号进行预处理,包括去噪处理、滤波处理等,从而得到准确的状态量,以便提高信号的稳定性和精确度。
11、进一步的,所述预设的转向参数根据车速、道路条件和工程机械的结构参数等具体应用情况设定。
12、进一步的,对转向控制量和控制系统进行安全性检测,判断当前转向操作是否存在高风险操作,包括但不限于:
13、判断控制系统是否存在故障;控制系统存在故障包括但不限于传感器故障、液压系统压力异常等,会使当前转向操作处在高风险情况下;
14、判断车辆当前状态是否在正常情况;车辆当前状态在正常情况下转向控制量才有效,才会被系统响应;
15、判断转向控制量实现的转向角度是否超过安全角度;该判断是为了确认是否存在急打转向,急打转向时,相同时间内转向角度变化比较大。
16、进一步的,根据安全性检测结果,输出不同的转向控制选项,包括:
17、当安全性检测结果与预期相符时,通过强化学习方式学习驾驶员的驾驶习惯和转向行为,优化转向控制策略,输出优化的转向液力控制指令;
18、当安全性检测结果判断当前转向操作存在高风险时,输出安全机制转向控制指令。
19、进一步的,所述安全机制转向控制指令包括但不限于:降低转向速度,限制转向角度、触发报警装置等,防止剧烈转向或系统故障导致的转向风险。
20、进一步的,所述方法还包括:监控安全机制转向控制指令的执行情况,根据实际执行情况进行反馈调整。例如根据车速、路面情况、驾驶员意图等变量来适当调整转向力等,使驾驶员能够及时发现车辆运行中的转向隐患和问题,确保工程机械的转向更加安全可靠。
21、第二方面,本发明提供了一种工程机械转向控制系统,用于实现第一方面所述的工程机械转向控制方法,包括采集模块、电子稳定控制模块、安全控制单元、执行模块和转向机构;
22、所述采集模块用于采集车辆运行状态信号、转向信号和扭矩信号,并将检测信号传输给安全控制单元和电子稳定控制系统;
23、所述电子稳定控制模块,根据采集模块监测的信号,进行车辆是否处于不稳定状态判断,并将判断信号传输给安全控制单元;
24、所述安全控制单元用于接收采集模块的信号检测信号、电子稳定控制系统的判断信号和执行模块的运行状态信号,并根据预设的安全阈值对接收的信号进行实时监测和分析处理,经过计算和处理后,输出控制指令至执行模块;
25、所述执行模块,用于响应安全控制单元的控制指令,驱动转向机构对工程机械的转向进行调整;
26、所述转向机构,用于转换和调整车辆的方向及转弯半径。
27、进一步的,所述安全控制单元还包括故障诊断模块和容错处理模块;
28、所述故障诊断模块根据采集模块的检测信号和执行模块的工作状态,判断是否存在控制系统故障或高风险操作,然后做出评估和决策;
29、所述容错处理模块用于根据故障诊断得到的转向控制系统参数变化对故障信号进行补偿和处理,输出安全机制转向控制指令。
30、进一步的,所述采集模块包括实时监测车辆的转向信号的转角传感器,以及实时监测施加在方向盘上的扭矩信号的扭矩传感器,还包括通过can总线获取发动机转速信息。
31、进一步的,所述执行模块包括液压泵、液压阀和液压缸,所述液压泵用于提供液压动力,液压阀用于调整和控制液压系统的流量,液压缸用于根据安全控制单元传输的控制指令,调整工程机械的转向。本发明所采用的执行器具有高可靠性和快速响应的特点,能够确保转向控制的准确性和安全性。
32、进一步的,还包括人机交互界面,与安全控制单元通过can线交互信息,用于调整转向控制系统的参数,监控安全机制的执行情况,并反馈给操作人员。操作人员可以通过人机交互界面设定安全阈值、查看传感器数据和执行模块状态等信息,及时了解系统运行情况,并根据需要调整系统参数。人机交互界面内还设置报警装置,当有故障或高风险时,安全控制单元传输信号触发人机交互界面内的报警器进行报警。
33、与现有技术相比,本发明所达到的有益效果:
34、本发明根据预设的转向参数,能够根据实时转向角度进行精确计算,使得转向控制更加稳定和可靠,降低了因环境因素引起转向故障的概率,通过引入安全性检测环节,能够提高转向控制的可靠性和稳定性,进一步提高工程机械的安全性能;
35、本发明提供多重安全机制:安全控制单元可以通过实时监测和故障检测来确保转向过程的安全性,通过分析转向角度和转向速度的变化趋势,安全控制单元能够识别可能存在的风险因素,在异常情况,系统能够迅速做出反应,并采取相应的安全措施,最大限度地减少事故风险;
36、本发明采用软件容错控制方法来解决转向系统的安全性问题,降低系统开发成本,还能确保系统的整体安全性和转向性能;当转向系统中的部件出现故障时,不仅可以检测到故障,而且还可以根据情况来维持转向功能或将转向功能维持在可接受的范围内;
37、本发明通过提高转向控制精度,完善反馈机制,及时预测识别设备问题并给出相应的报警或者控制命令,有效提升操作者的工作效率,同时确保设备的安全性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!