无人驾驶赛车的转向系统及控制方法
本发明涉及转向系统,尤其涉及一种无人驾驶赛车的转向系统及控制方法。
背景技术:
1、无人驾驶赛车在设计时要求具备无人驾驶和主动驾驶两种驾驶控制模式,两种驾驶模式能够迅速的转换,以满足中国大学生无人驾驶方程式大赛的规则要求。
2、现有的转向系统控制模式的切换形式存在不稳定性,如中国专利“cn111376970a”公开的一种无人方程式赛车转向系统的自动和手动切换装置,包括主动转向装置、自动转向动力装置和齿轮分离啮合装置,其中自动转向实现用主动齿轮可在水平方向上移动,使得主动齿轮与自动齿轮分离,进而避免对主动驾驶造成干涉,但从动齿轮与转向齿轮啮合,在主动驾驶过程中,会存在从动齿轮移位,后续虽然方向盘能够复位,但无法保证主动齿轮与从动齿轮之间的稳定啮合,易造成齿轮间的磨损;另外,在无人驾驶中缺少对转向舵机的输出监测,无法保证自动转向的准确性。
技术实现思路
1、针对现有技术中所存在的不足,本发明提供了一种无人驾驶赛车的转向系统及控制方法,其解决了现有技术中存在的无人驾驶和主动驾驶切换稳定性差且缺少对无人驾驶状态下的转动角度监测的问题。
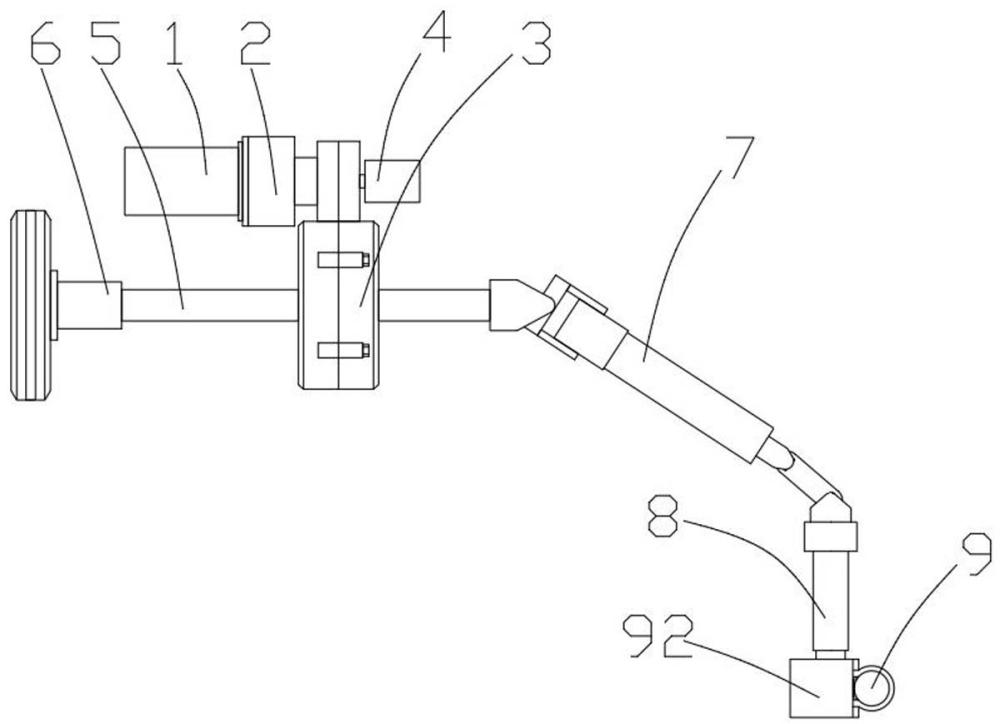
2、根据本发明的实施例,无人驾驶赛车的转向系统,包括主动转向组件、连接在主动转向组件输出端的转向器和传动连接在主动转向组件的输出端上的自动转向组件,自动转向组件包括依次传动连接的转向舵机、电磁离合器和减速器,减速器的输出端传动连接主动转向组件的输出端,电磁离合器一侧设置有与电磁离合器输出端传动连接的编码器,编码器信号连接自动驾驶控制系统。
3、优选的,所述电磁离合器包括安装壳、转动连接在安装壳两端的输入轴和输出轴以及轴向滑动安装在输出轴上的滑动摩擦块,滑动摩擦块位于安装壳内,安装壳内部靠近输入轴的一端设置有电磁线圈,电磁线圈和滑动摩擦块之间设置有弹簧,滑动摩擦块与输出轴之间设置有转动限位结构,输出轴的活动端连接所述编码器的输入轴,输出轴通过齿轮传动连接所述减速器的输入端。
4、优选的,所述安装壳内壁设置有卡槽,卡槽内卡装有挡板,所述电磁线圈和弹簧分别位于挡板的两侧。
5、优选的,所述安装壳成圆柱形结构,所述挡板可转动地卡装在所述卡槽内,所述滑动摩擦块的边缘设置有磁块。
6、优选的,所述转动限位结构包括固定连接在所述滑动摩擦块朝向所述输出轴的侧壁上的插杆,所述输出轴上固定设置有连接盘,连接盘上设置有被插杆贯穿的通孔。
7、优选的,所述滑动摩擦块和输入轴的相对侧壁上均同轴固定连接有摩擦盘。
8、优选的,所述主动转向组件包括转向杆、固定与转向杆一端的方向盘和传动连接在转向杆另一端的万向节,转向杆通过齿轮传动连接所述减速器的输出端。
9、优选的,所述转向器包括保护壳、竖直转动设置在保护壳内的传动轴、安装在传动轴底端的转向齿轮和水平滑动设置在保护壳内的转向杆,转向杆上设置有齿条,齿条与转向齿轮传动连接。
10、无人驾驶赛车的转向系统的控制方法,包括如下步骤:
11、s1、自动驾驶时,控制电磁线圈通电,电磁线圈电磁吸附滑动摩擦块并压缩弹簧,滑动摩擦块的端壁抵接在输入轴上,转向舵机的输出端带动输入轴转动,输入轴通过摩擦力带动滑动摩擦块转动,滑动摩擦块转动,带动输出轴转动,输出轴通过减速器带动主动转向组件的输出端转动,进而实现转向器输出轴的滑动,实现自动转向;
12、s2、编码器的输入端监测输出轴的转速和转动圈数,并将转速以及转动圈数的数据信号传输至自动驾驶控制系统,自动驾驶控制系统根据转速判断车轮的角度变化速度,结合车速判断赛车转角的尺寸,根据设定路径的弯道转动角度,调整车速和/或转向舵机的输出转速,根据输出轴的转动圈数进行赛车直行时的转向复位;
13、s3、主动驾驶时,控制电磁线圈断电,被压缩的弹簧推动滑动摩擦块复位,滑动摩擦块与输入轴分离,转向舵机与主动转向组件断开连接。
14、相比于现有技术,本发明具有如下有益效果:
15、1、以电磁离合器作为主动驾驶和自动驾驶的切换结构,通过滑动摩擦块与输入轴的抵接,实现转向舵机的传动,通过滑动摩擦块与输入轴的分离,实现转向舵机与主动转向组件的分离,提高了主动驾驶和自动驾驶切换的顺畅性和稳定性。
16、2、在电磁离合器的输出轴连接编码器,监控转向舵机的转速,在减速器的减速比已知的情况下能够推断出传动轴的转速和转动角度,判断出转向器的滑移速度和位置,进而监控车辆轮胎的角度,提高无人驾驶赛车转弯时的可控性和安全性。
技术特征:
1.无人驾驶赛车的转向系统,其特征在于:包括主动转向组件、连接在主动转向组件输出端的转向器(9)和传动连接在主动转向组件的输出端上的自动转向组件,自动转向组件包括依次传动连接的转向舵机(1)、电磁离合器(2)和减速器(3),减速器(3)的输出端传动连接主动转向组件的输出端,电磁离合器(2)一侧设置有与电磁离合器(2)输出端传动连接的编码器(4),编码器(4)信号连接自动驾驶控制系统。
2.如权利要求1所述无人驾驶赛车的转向系统,其特征在于:所述电磁离合器(2)包括安装壳(21)、转动连接在安装壳(21)两端的输入轴(22)和输出轴(23)以及轴向滑动安装在输出轴(23)上的滑动摩擦块(24),滑动摩擦块(24)位于安装壳(21)内,安装壳(21)内部靠近输入轴(22)的一端设置有电磁线圈(26),电磁线圈(26)和滑动摩擦块(24)之间设置有弹簧(28),滑动摩擦块(24)与输出轴(23)之间设置有转动限位结构,输出轴(23)的活动端连接所述编码器(4)的输入轴,输出轴(23)通过齿轮传动连接所述减速器(3)的输入端。
3.如权利要求2所述无人驾驶赛车的转向系统,其特征在于:所述安装壳(21)内壁设置有卡槽,卡槽内卡装有挡板(25),所述电磁线圈(26)和弹簧(28)分别位于挡板(25)的两侧。
4.如权利要求3所述无人驾驶赛车的转向系统,其特征在于:所述安装壳(21)成圆柱形结构,所述挡板(25)可转动地卡装在所述卡槽内,所述滑动摩擦块(24)的边缘设置有磁块。
5.如权利要求2所述无人驾驶赛车的转向系统,其特征在于:所述转动限位结构包括固定连接在所述滑动摩擦块(24)朝向所述输出轴(23)的侧壁上的插杆(29),所述输出轴(23)上固定设置有连接盘(27),连接盘(27)上设置有被插杆(29)贯穿的通孔。
6.如权利要求2所述无人驾驶赛车的转向系统,其特征在于:所述滑动摩擦块(24)和输入轴(22)的相对侧壁上均同轴固定连接有摩擦盘。
7.如权利要求1所述无人驾驶赛车的转向系统,其特征在于:所述主动转向组件包括转向杆(5)、固定与转向杆(5)一端的方向盘(6)和传动连接在转向杆(5)另一端的万向节(7),转向杆(5)通过齿轮传动连接所述减速器(3)的输出端。
8.如权利要求1所述无人驾驶赛车的转向系统,其特征在于:所述转向器(9)包括保护壳(92)、竖直转动设置在保护壳(92)内的传动轴(8)、安装在传动轴(8)底端的转向齿轮(81)和水平滑动设置在保护壳(92)内的转向杆,转向杆上设置有齿条(91),齿条(91)与转向齿轮(81)传动连接。
9.如权利要求2所述无人驾驶赛车的转向系统的控制方法,其特征在于,包括如下步骤:
技术总结
本发明提供了一种无人驾驶赛车的转向系统,包括主动转向组件、连接在主动转向组件输出端的转向器和传动连接在主动转向组件的输出端上的自动转向组件,自动转向组件包括依次传动连接的转向舵机、电磁离合器和减速器,减速器的输出端传动连接主动转向组件的输出端,电磁离合器一侧设置有与电磁离合器输出端传动连接的编码器,编码器信号连接自动驾驶控制系统。本发明产生了提高驾驶模式切换的舒畅形和稳定性以及自动驾驶的安全性和可控性的效果。
技术研发人员:张友兵,兰建平,杨亚会,毕栋,龚家元
受保护的技术使用者:湖北汽车工业学院
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!