一种四足机器人步态调度方法、装置及设备
本发明涉及机器人控制,尤其涉及一种四足机器人步态调度方法、装置及设备。
背景技术:
1、随着智能机器人的不断发展,足式机器人逐渐进入人们的视野,足式动物的行走是靠其多条腿之间的协同配合,每条腿都在支撑相与摆动相之间切换,在支撑相时对外界环境的作用力会反过来对机器人机体造成一个反作用力,进而实现自由移动。足式机器人学习这类足式动物的运动方式,结构上具备有多条腿,通过电机或者液压等运动装置去驱动每条腿的运动,实现仿生运动。
2、足式机器人要实现腿与腿之间的协调控制,需要规划好统一的步态,根据当前步态对每条腿进行同步切换,其一般是通过给定摆动相和支撑相的时间,检测当前时间达到摆动相最大时间时,就认为其已经触地,进行步态切换,是一种无反馈的开环控制;或是通过检测摆动腿的状态,当摆动腿触地时,事件触发,进行步态切换,是一种有反馈的闭环控制。
3、现有的足式机器人步态调度方法需要额外的传感器支持,且必须安装在足底,其接触状态完全取决于传感器,使得对机器人步态调度的过程过于依赖于传感器,若传感器出现错误信号,会导致四足机器人无法持续保持稳定的状态。
技术实现思路
1、本发明提供了一种四足机器人步态调度方法、装置及设备,解决了现有的足式机器人步态调度方法过于依赖于传感器,若传感器出现错误信号,会导致四足机器人无法持续保持稳定的状态的技术问题。
2、本发明第一方面提供的一种四足机器人步态调度方法,包括:
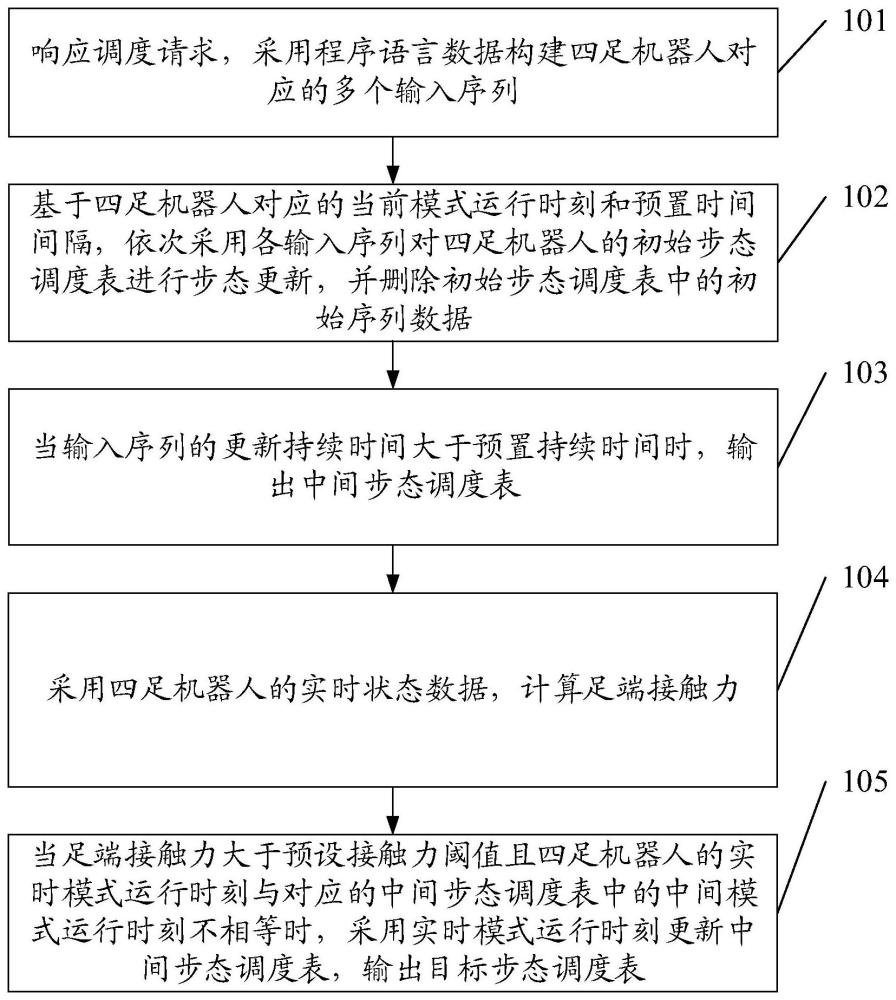
3、响应调度请求,采用程序语言数据构建四足机器人对应的多个输入序列;
4、基于所述四足机器人对应的当前模式运行时刻和预置时间间隔,依次采用各所述输入序列对所述四足机器人的初始步态调度表进行步态更新,并删除所述初始步态调度表中的初始序列数据;
5、当所述输入序列的更新持续时间大于预置持续时间时,输出中间步态调度表;
6、采用所述四足机器人的实时状态数据,计算足端接触力;
7、当所述足端接触力大于预设接触力阈值且所述四足机器人的实时模式运行时刻与对应的所述中间步态调度表中的中间模式运行时刻不相等时,采用所述实时模式运行时刻更新所述中间步态调度表,输出目标步态调度表。
8、可选地,所述预置时间间隔包括预置第一时间间隔和预置第二时间间隔;所述基于所述四足机器人对应的当前模式运行时刻和预置时间间隔,依次采用各所述输入序列对所述四足机器人的初始步态调度表进行步态更新,并删除所述初始步态调度表中的初始序列数据的步骤,包括:
9、采用所述当前模式运行时刻与预置第一时间间隔进行加法运算,确定第一目标时刻;
10、采用所述当前模式运行时刻与预置第二时间间隔进行减法运算,确定第二目标时刻;
11、在所述第一目标时刻,删除所述第一目标时刻之后的所述初始步态调度表中的初始序列数据后,依次采用各所述输入序列对所述四足机器人的初始步态调度表进行步态更新;
12、删除所述第二目标时刻之前的所述初始步态调度表中的初始序列数据。
13、可选地,所述实时状态数据包括长度数据、角度数据和关节力矩数据;所述采用所述四足机器人的实时状态数据,计算足端接触力的步骤,包括:
14、采用长度数据和角度数据,构建所述四足机器人对应的腿部雅可比矩阵;
15、采用所述腿部雅可比矩阵和关节力矩数据,计算足端接触力。
16、可选地,所述腿部雅可比矩阵,具体为:
17、
18、其中,l2为长度数据中的大腿长度;为角度数据中的正弦第二关节角度值;θ3为角度数据中的四足机器人的腿部的第三关节角度;l1为长度数据中的腿部摆臂长度;为角度数据中的余弦第一关节角度值;为角度数据中的正弦第一关节角度值;为角度数据中的余弦第二关节角度值;l3为长度数据中的小腿长度;θ2为角度数据中的四足机器人的腿部的第二关节角度;θ1为角度数据中的四足机器人的腿部的第一关节角度;
19、所述足端接触力的计算公式,具体为:
20、
21、其中,f为足端接触力;jt为腿部雅可比矩阵的转置;为关节力矩数据中的关节θ1的关节力矩;为关节力矩数据中的关节θ2的关节力矩;为关节力矩数据中的关节θ3的关节力矩。
22、可选地,还包括:
23、当所述足端接触力大于预设接触力阈值且所述四足机器人的实时模式运行时刻与对应的所述中间步态调度表中的中间模式运行时刻相等时,获取所述四足机器人对应的轨迹高度数据、足点数据和运行时刻数据;
24、基于所述运行时刻数据,确定缩放系数;
25、采用所述缩放系数和所述轨迹高度数据,计算缩放后轨迹高度数据;
26、采用所述缩放系数和所述足点数据,计算缩放后足点数据;
27、将所述足点数据、所述缩放后足点数据和所述缩放后轨迹高度数据代入预设摆动曲线方程组,并结合预置约束条件进行运算,输出第一摆动曲线和第二摆动曲线;
28、采用所述运行时刻数据、所述第一摆动曲线和所述第二摆动曲线,构建缩放摆动轨迹曲线;
29、对所述缩放摆动轨迹曲线进行线性插值,确定所述四足机器人对应的足端期望位置数据。
30、本发明第二方面提供的一种四足机器人步态调度装置,包括:
31、响应模块,用于响应调度请求,采用程序语言数据构建四足机器人对应的多个输入序列;
32、更新模块,用于基于所述四足机器人对应的当前模式运行时刻和预置时间间隔,依次采用各所述输入序列对所述四足机器人的初始步态调度表进行步态更新;
33、输出模块,用于当所述输入序列的更新持续时间大于预置持续时间时,输出中间步态调度表;
34、计算模块,用于采用所述四足机器人的实时状态数据,计算足端接触力;
35、判断模块,用于当所述足端接触力大于预设接触力阈值且所述四足机器人的实时模式运行时刻与对应的所述中间步态调度表中的中间模式运行时刻不相等时,采用所述实时模式运行时刻更新所述中间步态调度表,输出目标步态调度表。
36、可选地,所述预置时间间隔包括预置第一时间间隔和预置第二时间间隔;所述更新模块包括:
37、第一确定子模块,用于采用所述当前模式运行时刻与预置第一时间间隔进行加法运算,确定第一目标时刻;
38、第二确定子模块,用于采用所述当前模式运行时刻与预置第二时间间隔进行减法运算,确定第二目标时刻;
39、删除子模块,用于删除所述第一目标时刻之后的所述初始步态调度表中的初始序列数据和所述第二目标时刻之前的所述初始步态调度表中的初始序列数据;
40、第一采用子模块,用于在所述第一目标时刻,依次采用各所述输入序列对所述四足机器人的初始步态调度表进行步态更新。
41、可选地,所述实时状态数据包括长度数据、角度数据和关节力矩数据;所述计算模块包括:
42、构建子模块,用于采用长度数据和角度数据,构建所述四足机器人对应的腿部雅可比矩阵;
43、第二采用子模块,用于采用所述腿部雅可比矩阵和关节力矩数据,计算足端接触力。
44、可选地,所述腿部雅可比矩阵,具体为:
45、
46、其中,l2为长度数据中的大腿长度;为角度数据中的正弦第二关节角度值;θ3为角度数据中的四足机器人的腿部的第三关节角度;l1为长度数据中的腿部摆臂长度;为角度数据中的余弦第一关节角度值;为角度数据中的正弦第一关节角度值;为角度数据中的余弦第二关节角度值;l3为长度数据中的小腿长度;θ2为角度数据中的四足机器人的腿部的第二关节角度;θ1为角度数据中的四足机器人的腿部的第一关节角度;
47、所述足端接触力的计算公式,具体为:
48、
49、其中,f为足端接触力;jt为腿部雅可比矩阵的转置;为关节力矩数据中的关节θ1的关节力矩;为关节力矩数据中的关节θ2的关节力矩;为关节力矩数据中的关节θ3的关节力矩。
50、本发明第三方面提供的一种电子设备,包括存储器及处理器,所述存储器中储存有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上述任一项所述的四足机器人步态调度方法的步骤。
51、从以上技术方案可以看出,本发明具有以下优点:
52、本发明的上述技术方案提供了一种四足机器人步态调度方法,首先响应调度请求,采用程序语言数据构建四足机器人对应的多个输入序列;基于四足机器人对应的当前模式运行时刻和预置时间间隔,依次采用各输入序列对四足机器人的初始步态调度表进行步态更新,并删除初始步态调度表中的初始序列数据;当输入序列的更新持续时间大于预置持续时间时,输出中间步态调度表;接着,采用四足机器人的实时状态数据,计算足端接触力;最后,当足端接触力大于预设接触力阈值且四足机器人的实时模式运行时刻与对应的中间步态调度表中的中间模式运行时刻不相等时,采用实时模式运行时刻更新中间步态调度表,输出目标步态调度表;上述方案,通过采用四足机器人的实时状态数据,计算足端接触力并与预设接触力阈值比较,并结合比对四足机器人的实时模式运行时刻与中间步态调度表中的中间模式运行时刻,从而输出目标步态调度表,该过程降低了对传感器的依赖性,能够令四足机器人持续保持稳定的状态,从而提高了对四足机器人步态调度的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!