一种液压双足机器人大腿板及液压双足机器人
本发明属于液压机器人本体结构设计相关,更具体地,涉及一种液压双足机器人大腿板及液压双足机器人。
背景技术:
1、液压双足机器人是一种通过液压系统实现运动控制的、模仿人类双足步行的机器人。在液压双足机器人中所使用的液压介质多为液压油,并使用软管进行液压油的传输。但软管传输的方式存在一些问题。
2、首先,在液压驱动过程中,由于摩擦损耗、压力损失等原因,系统会产生热量,但软管受到材质、体积的限制,不易散热,液压油吸收的热量不能及时逸散,油温较高,从而影响伺服阀、密封件等元器件的使用性能,易导致系统失效。其次,机器人的运动会使软管发生弯曲、扭转,这会造成能量损失,影响机器人的运动效率。此外,软管的使用增加了机器人的重量和复杂性,软管的摩擦、磨损和破裂也会影响机器人的可靠性和寿命。因此,在设计时要尽可能减少所用软管的数量以及单根软管的长度,以减少能量损失,使机器人的运动更加流畅和稳定。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种液压双足机器人大腿板及液压双足机器人,采用无管化的方式为液压油在腰部与大腿、小腿之间的传输提供通道,缩短了单根软管的长度,并降低了软管接口处结构的复杂度,降低了软管对机器人运动可靠性的影响,使腿部整体结构更加简洁有序。
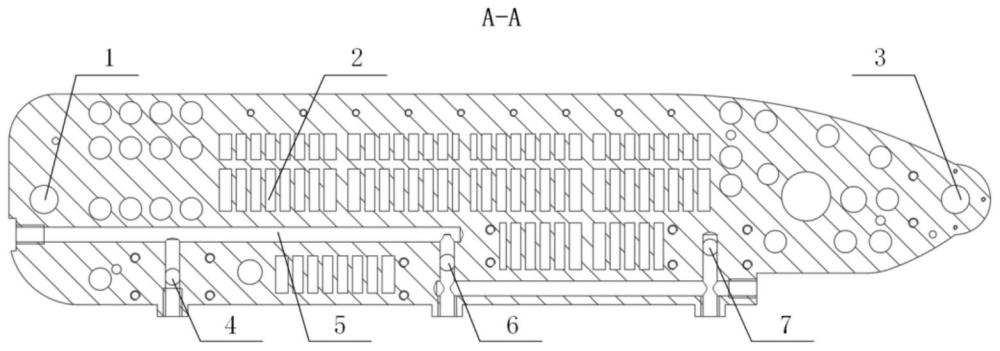
2、为实现上述目的,按照本发明的一个方面,提供了一种液压双足机器人大腿板,所述大腿板的内部开设有液压油传输通道,所述液压油传输通道内嵌于所述大腿板内;所述大腿板上开设有多个间隔设置的散热通孔,使得大腿板开设有散热通孔的区域形成散热格栅。
3、进一步地,所述散热格栅分成多个区域分布在所述大腿板上。
4、进一步地,所述散热通孔的孔壁上设置有微型风扇,所述微型风扇用于加快所述散热通孔内的气流流动。
5、进一步地,所述大腿板为板状结构,其相背的两端分别开设有骨盆连接孔及小腿连接孔;所述大腿板通过所述小腿连接孔及所述骨盆连接孔分别连接于骨盆及小腿。
6、进一步地,所述液压油传输通道包括第一流道、第二流道、第一支路、第二支路及第三支路,所述第一流道及所述第二流道沿所述大腿板的长度方向设置,所述第一支路、所述第二支路及所述第三支路相互平行,且均垂直于所述大腿板的长度方向设置;所述第一支路、所述第二支路及所述第三支路均贯穿所述大腿板的一侧;所述第一流道贯穿所述大腿板的一端,所述第二流道贯穿所述大腿板的另一端;所述第一流道的一端通过所述第二支路与所述第二流道相连通,另一端连接有堵头;所述第二流道远离所述第一流道的一端也螺纹连接有堵头;所述第一支路的一端连接于所述第一流道,另一端螺纹连接有堵头;所述第二支路远离所述第一流道的一端螺纹连接有堵头;所述第三支路的中部与所述第二流道相连通,其贯穿所述大腿板的一端螺纹连接有堵头。
7、进一步地,所述大腿板还开设有第一油口、第二油口及第三油口,所述第一油口、所述第二油口及所述第三油口分别与所述第一支路、所述第二支路及所述第三支路垂直连接。
8、进一步地,所述第一油口、所述第二油口及所述第三油口处分别安装有第一快速接头、第二快速接头及第三快速接头;所述第一快速接头、所述第二快速接头及所述第三快速接头分别用于与骨盆、大腿及小腿实现液压油的快速连通与断开。
9、本发明还提供了一种液压双足机器人,所述液压双足机器人包括骨盆、小腿及如上所述的大腿板,所述大腿板相背的两端分别连接所述骨盆及所述小腿。
10、总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的液压双足机器人大腿板及液压双足机器人主要具有以下有益效果:
11、1.本发明将流道内嵌于大腿板内,通过油口来实现液压油在骨盆、大腿及小腿之间的传输,减少了软管的使用,如骨盆处的液压油只需输送到第一油口,不必输送到小腿处,从而减少了骨盆处液压油接口的复杂度,缩短了所用软管的长度。
12、2.大腿板上开设有多个间隔设置的散热通孔,使的大腿板开设有散热通孔的区域形成散热格栅,散热格栅可以加快散热,并可以减轻大腿板的重量,做到轻量化。
13、3.所述大腿板将机器人骨盆与小腿连接,不仅起到衔接作用,还能够分担上半身的重量,起到了承重作用。
14、4.每个油口都设置有快速接头,通过快速接头可以实现与骨盆、大腿及小腿之间的液压管路的快速连通与断开。
技术特征:
1.一种液压双足机器人大腿板,其特征在于:
2.如权利要求1所述的液压双足机器人大腿板,其特征在于:所述散热格栅分成多个区域分布在所述大腿板上。
3.如权利要求1所述的液压双足机器人大腿板,其特征在于:所述散热通孔的孔壁上设置有微型风扇,所述微型风扇用于加快所述散热通孔内的气流流动。
4.如权利要求1所述的液压双足机器人大腿板,其特征在于:所述大腿板为板状结构,其相背的两端分别开设有骨盆连接孔及小腿连接孔;所述大腿板通过所述小腿连接孔及所述骨盆连接孔分别连接于骨盆及小腿。
5.如权利要求1-4任一项所述的液压双足机器人大腿板,其特征在于:所述液压油传输通道包括第一流道、第二流道、第一支路、第二支路及第三支路,所述第一流道及所述第二流道沿所述大腿板的长度方向设置,所述第一支路、所述第二支路及所述第三支路相互平行,且均垂直于所述大腿板的长度方向设置;所述第一支路、所述第二支路及所述第三支路均贯穿所述大腿板的一侧;所述第一流道贯穿所述大腿板的一端,所述第二流道贯穿所述大腿板的另一端;所述第一流道的一端通过所述第二支路与所述第二流道相连通,另一端连接有堵头;所述第二流道远离所述第一流道的一端也螺纹连接有堵头;所述第一支路的一端连接于所述第一流道,另一端螺纹连接有堵头;所述第二支路远离所述第一流道的一端螺纹连接有堵头;所述第三支路的中部与所述第二流道相连通,其贯穿所述大腿板的一端螺纹连接有堵头。
6.如权利要求5所述的液压双足机器人大腿板,其特征在于:所述大腿板还开设有第一油口、第二油口及第三油口,所述第一油口、所述第二油口及所述第三油口分别与所述第一支路、所述第二支路及所述第三支路垂直连接。
7.如权利要求6所述的液压双足机器人大腿板,其特征在于:所述第一油口、所述第二油口及所述第三油口处分别安装有第一快速接头、第二快速接头及第三快速接头;所述第一快速接头、所述第二快速接头及所述第三快速接头分别用于与骨盆、大腿及小腿实现液压油的快速连通与断开。
8.一种液压双足机器人,其特征在于:所述液压双足机器人包括骨盆、小腿及权利要求1-7任一项所述的大腿板,所述大腿板相背的两端分别连接所述骨盆及所述小腿。
技术总结
本发明属于液压机器人本体结构设计相关技术领域,其公开了一种液压双足机器人大腿板及液压双足机器人,所述大腿板的内部开设有液压油传输通道,所述液压油传输通道内嵌于所述大腿板内;所述大腿板上开设有多个间隔设置的散热通孔,使得大腿板开设有散热通孔的区域形成散热格栅。本发明采用无管化的方式为液压油在腰部与大腿、小腿之间的传输提供通道,缩短了单根软管的长度,并降低了软管接口处结构的复杂度,降低了软管对机器人运动可靠性的影响,使腿部整体结构更加简洁有序。
技术研发人员:高亮,卢盛雨,王佳钰,谢思诚,李静渊,李新宇
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!