一种电子助力转向补偿控制方法、装置、设备及介质与流程
本发明实施例涉及一种电子助力,尤其涉及一种电子助力转向补偿控制方法、装置、设备及介质。
背景技术:
1、随着商用车电动化、智能化等新技术的发展,越来越多的商用车匹配了循环球式eps(electric power steering,电子助力转向系统),较于传统的液压助力转向系统,可实现随速助力、主动回正等功能,提高转向操纵感。但是针对匹配独立悬架的商用车,若采用循环球式eps,会造成转向系统布置复杂、成本增加。因此,匹配齿轮齿条式eps的转向系统方案更加合理。
2、但是,目前齿轮齿条式eps多用于乘用车,其电动转向控制策略也主要针对乘用车使用工况,但并不能完全适用于商用车,尤其轻型商用车的使用特点。通常轻型商用车转向系统布置不同于乘用车,转向器布置在方向盘后侧,中间连接需接角传动器,驾驶员作用于方向盘上的手力矩需通过传动轴、角传动器后才能传递给齿轮齿条式eps转向器,eps转向器完成转向助力;由于商用车的使用工况也不同于乘用车,如空满载载荷变化大、路况种类多样,导致不同载荷、不同路况下,需要eps转向器提供的转向力矩也不相同,导致不同的使用情况,驾驶员手感差异大,影响转向操纵感。
技术实现思路
1、本发明提供了一种电子助力转向补偿控制方法、装置、设备及介质,实现载荷不同或路况不同下转向助力手感差异小,转向操纵感强的目的。
2、第一方面,本发明实施例提供了一种电子助力转向补偿控制方法,该方法包括:
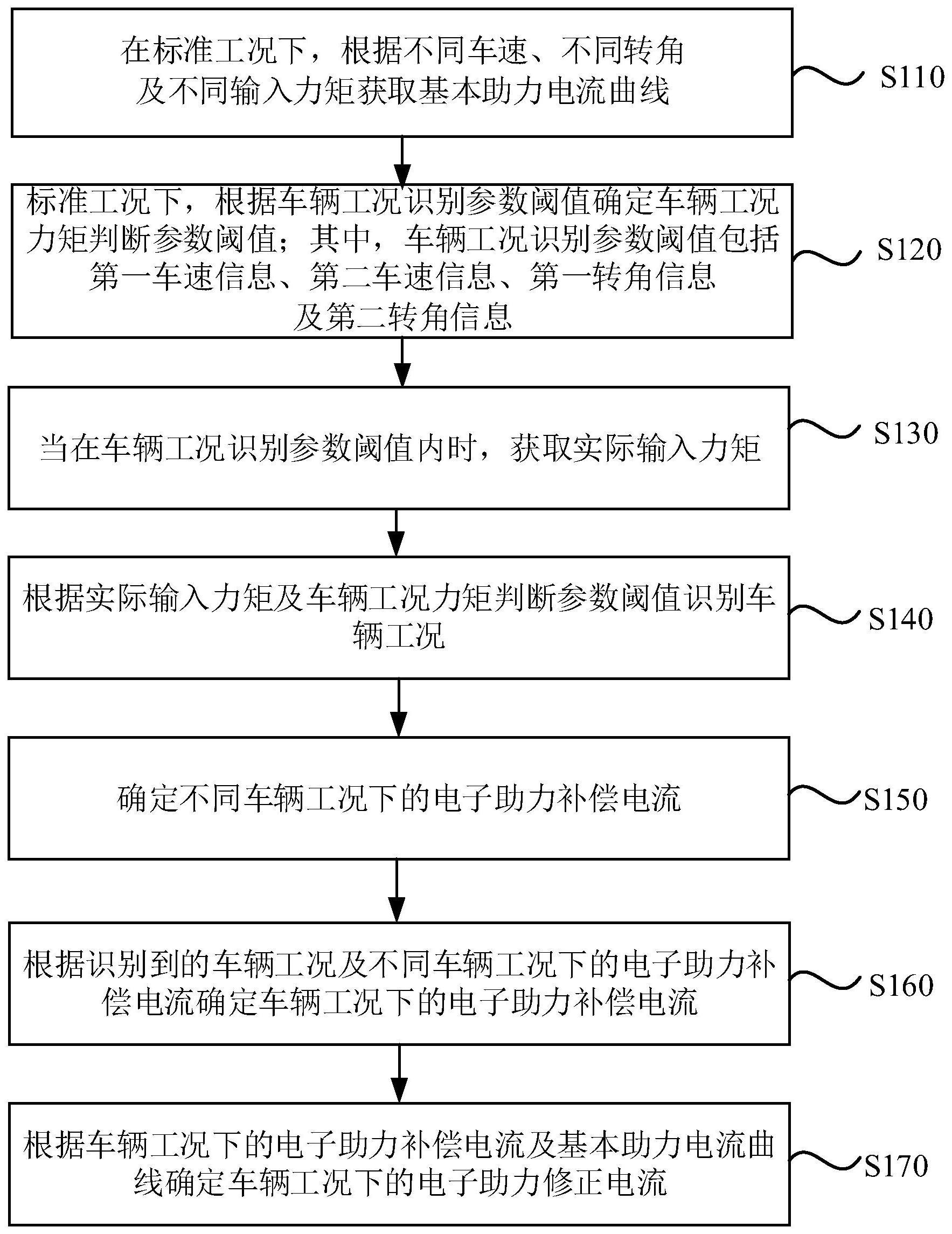
3、在标准工况下,根据不同车速、不同转角及不同输入力矩获取基本助力电流曲线;
4、所述标准工况下,根据车辆工况识别参数阈值确定车辆工况力矩判断参数阈值;其中,所述车辆工况识别参数阈值包括第一车速信息、第二车速信息、第一转角信息及第二转角信息;
5、当在所述车辆工况识别参数阈值内时,获取实际输入力矩;
6、根据所述实际输入力矩及所述车辆工况力矩判断参数阈值识别车辆工况;
7、确定不同车辆工况下的电子助力补偿电流;
8、根据识别到的所述车辆工况及所述不同车辆工况下的电子助力补偿电流确定所述车辆工况下的电子助力补偿电流;
9、根据所述车辆工况下的电子助力补偿电流及所述基本助力电流曲线确定所述车辆工况下的电子助力修正电流。
10、可选的,标准工况下,根据车辆工况识别参数阈值确定车辆工况力矩判断参数阈值,包括:
11、所述标准工况下,当转向器转角处于所述第一转角信息及所述第二转角信息之间,且当车速处于所述第一车速信息及所述第二车速信息之间时,根据所述第一转角信息确定第一输入力矩信息;根据所述第二转角信息确定第二输入力矩信息;
12、并根据第一输入力矩信息确定所述第一输入力矩阈值信息;根据第二输入力矩信息确定所述第二输入力矩阈值信息;根据所述第一输入力矩阈值信息及所述第二输入力矩阈值信息的差值确定力矩差阈值信息;
13、其中,所述车辆工况力矩判断参数阈值为所述第一输入力矩阈值信息、所述第二输入力矩阈值信息及所述力矩差阈值信息。
14、可选的,根据所述实际输入力矩及所述车辆工况力矩判断参数阈值识别车辆工况,包括:
15、当所述实际输入力矩大于所述第一输入力矩阈值信息,或者所述实际输入力矩小于所述第一输入力矩阈值信息识别车辆工况为非标准工况。
16、可选的,该方法还包括:
17、当在所述车辆工况识别参数阈值内时,获取实际输入力矩波动值;
18、当所述实际输入力矩波动小于所述力矩差阈值信息识别车辆工况为非标准工况。
19、可选的,确定不同车辆工况下的电子助力补偿电流,包括:
20、所述标准工况下,根据所述车辆工况识别参数阈值还确定补偿标定参数;其中,所述补偿标定参数包括标准输入力矩参数及标准车速参数;
21、根据所述基本助力电流曲线及所述标准输入力矩参数、所述标准车速参数确定不同车速下的电子助力车速补偿系数曲线;
22、在所述车辆工况识别参数阈值内,根据不同车辆工况下的实际输入力矩及所述标准输入力矩参数确定不同车辆工况下的补偿电流值;
23、根据所述不同车速下的电子助力车速补偿系数曲线及所述不同车辆工况下的补偿电流值确定不同车辆工况下的电子助力电流补偿。
24、可选的,标准工况下,根据所述车辆工况识别参数阈值还确定补偿标定参数;其中,所述补偿标定参数包括标准输入力矩参数及标准车速参数;包括:
25、所述标准工况下,当转向器转角处于所述第一转角信息及所述第二转角信息之间,且当车速处于所述第一车速信息及所述第二车速信息之间时,根据所述第一车速信息及所述第二车速信息确定所述标准车速参数;
26、并根据所述第一转角信息确定第一输入力矩信息;根据所述第二转角信息确定第二输入力矩信息;根据所述第一输入力矩信息及所述第二输入力矩信息确定所述标准输入力矩参数。
27、可选的,该方法还包括:
28、获取转向器输入轴角速度;
29、根据方向盘转动惯量、转向轴转动惯量、角传动器转动惯量、传动轴转动惯量以及所述转向器输入角速度,确定转向器输入轴波动扭矩:
30、确定不同波动扭矩下的电子助力扭矩波动补偿电流曲线;
31、根据所述转向器输入轴波动扭矩及所述电子助力扭矩波动补偿电流曲线确定转向器输入扭矩波动补偿电流;
32、将所述转向器输入扭矩波动补偿电流补偿至不同所述输入力矩及所述实际输入力矩。
33、第二方面,本发明实施例还提供了一种电子助力转向补偿控制装置,该装置包括:
34、第一获取模块,用于在标准工况下,根据不同车速、不同转角及不同输入力矩获取基本助力电流曲线;
35、第一确定模块,用于所述标准工况下,根据车辆工况识别参数阈值确定车辆工况力矩判断参数阈值;其中,所述车辆工况识别参数阈值包括第一车速信息、第二车速信息、第一转角信息及第二转角信息;
36、第二获取模块,用于当在所述车辆工况识别参数阈值内时,获取实际输入力矩;
37、识别模块,用于根据所述实际输入力矩及所述车辆工况力矩判断参数阈值识别车辆工况;
38、第二确定模块,用于确定不同车辆工况下的电动助力补偿电流;
39、第三确定模块,用于根据识别到的所述车辆工况及所述不同车辆工况下的电子助力补偿电流确定所述车辆工况下的电子助力补偿电流;
40、修正模块,用于根据所述车辆工况下的电子助力补偿电流及所述基本助力电流曲线确定所述车辆工况下的电子助力修正电流。
41、第三方面,本发明实施例还提供了一种电子设备,所述电子设备包括:
42、至少一个处理器;以及
43、与所述至少一个处理器通信连接的存储器;其中,
44、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行第一方面所述的电子助力转向补偿控制方法。
45、第四方面,本发明实施例还提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现第一方面所述的电子助力转向补偿控制方法。
46、本发明实施例,在标准工况下,通过根据不同车速、不同转角及不同输入力矩获取基本助力电流曲线;标准工况下,根据车辆工况识别参数阈值确定车辆工况力矩判断参数阈值;其中,车辆工况识别参数阈值包括第一车速信息、第二车速信息、第一转角信息及第二转角信息;当在车辆工况识别参数阈值内时,获取实际输入力矩;根据实际输入力矩及车辆工况力矩判断参数阈值识别车辆工况;确定不同车辆工况下的电子助力补偿电流;根据识别到的车辆工况及不同车辆工况下的电子助力补偿电流确定车辆工况下的电子助力补偿电流;根据车辆工况下的电子助力补偿电流及基本助力电流曲线确定车辆工况下的电子助力修正电流,如此实现了不同载荷或不同路况转向助力手感差异小,转向操纵感强的目的。
- 还没有人留言评论。精彩留言会获得点赞!