一种具有六自由度的模块化直线驱动人形机器人腿部系统
本发明涉及一种腿部结构,具体涉及一种具有六自由度的模块化直线驱动人形机器人腿部系统,属于人形机器人。
背景技术:
1、曾经,人形机器人作为影视作品中的形象给人以无限想象,科技迅猛发展的当今世界,这种想象正在逐步成为现实。当今世界,各国都在积极地进行人形机器人技术的研究,目前人形机器人技术已经获得了许多可喜的研究成果,但人形机器人腿部作为机器人运动的重要部分仍存在许多方面的问题亟待解决。
2、为了使人形机器人获得较好的动力学性能,故在设计时需要各个关节的运动形式较为灵活,但由于控制参数不同,造成每个关节驱动装置的形式、规格、尺寸等存在较大差异,成本较高。同时人体各关节均由肌肉牵拉,采用旋转电机驱动关节的仿生程度不高,导致外观拟人度较低。同时满足关节需求的旋转电机尺寸、质量较大,会导致整体机器人质量偏大,无法实现轻量化的目的。
技术实现思路
1、本发明为了解决目前人形机器人各关节采用旋转电机的方式进行驱动,导致整体结构复杂、总重大和腿部结构仿生程度不高的问题,进而提供一种具有六自由度的模块化直线驱动人形机器人腿部系统,每个关节的自由度通过电缸进行驱动实现,并通过合理的布局,使得腿部系统具有整体结构简单、布局紧凑、体积小、质量轻和仿生度高的特点。
2、本发明为解决上述技术问题采用的技术方案是:
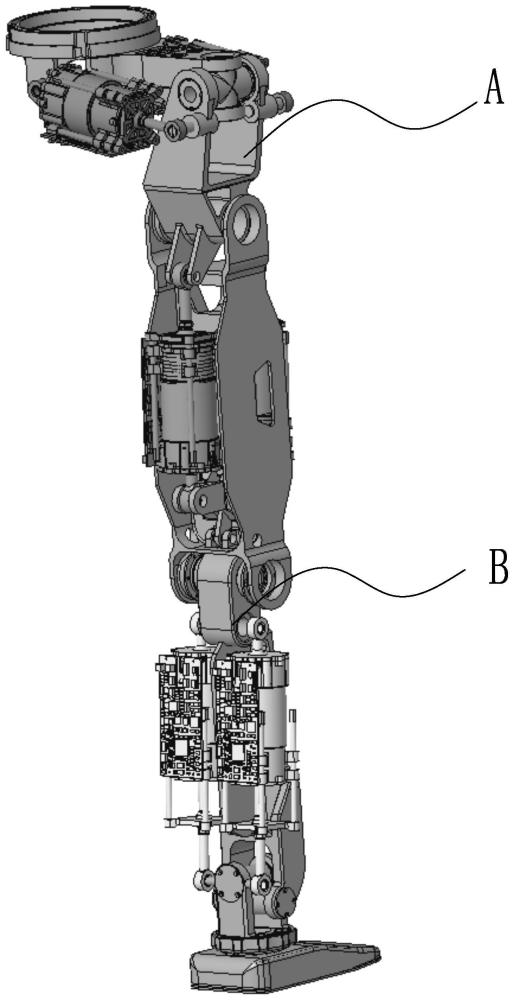
3、一种具有六自由度的模块化直线驱动人形机器人腿部系统,其包括三自由度的髋关节结构和三自由的腿部结构,所述的髋关节结构与腿部结构通过髋关节俯仰轴进行铰连接;
4、所述的髋关节结构包括髋关节上基座、髋关节下基座、髋关节万向节、两个侧摆偏航直线驱动器和一个俯仰直线驱动器;所述的髋关节上基座设置在髋关节下基座的一侧,并通过髋关节万向节与髋关节下基座进行铰连接;两个侧摆偏航直线驱动器对称设置在髋关节上基座的两侧,每个侧摆偏航直线驱动器的机身通过球轴承铰连接在髋关节上基座上,侧摆偏航直线驱动器的驱动端通过球轴承铰连接在髋关节下基座上,髋关节上基座与髋关节下基座之间通过两个侧摆偏航直线驱动器的耦合作用实现髋关节下基座的侧摆与偏航,进而带动腿部结构的侧摆与偏航;所述的俯仰直线驱动器布置在腿部结构的后侧,俯仰直线驱动器的机身通过轴承铰连接在腿部结构上,俯仰直线驱动器的驱动端通过轴承铰连接在髋关节下基座上,腿部结构在俯仰直线驱动器的驱动下绕髋关节俯仰轴进行俯仰动作;
5、所述的腿部结构包括大腿、膝关节转轴、小腿、踝关节万向节组件、脚部、两个踝关节驱动器、膝关节直线驱动器和四连杆曲柄摇杆组件;所述大腿的顶端与髋关节下基座共同铰连接在髋关节俯仰轴上,大腿的底端与小腿的顶端通过膝关节转轴进行转动连接,小腿的底端与脚部通过踝关节万向节组件进行铰连接;所述的膝关节直线驱动器和四连杆曲柄摇杆组件安装大腿的前侧,并驱动小腿绕膝关节转轴进行俯仰动作,两个所述的踝关节驱动器对称布置在小腿的左右两侧,脚部在两个踝关节驱动器的耦合驱动下实现俯仰和偏航运动。
6、优选地,所述的髋关节万向节包括有两根垂直设置并可转动的销轴,分别为沿y轴方向设置的销轴一和沿z轴方向设置的销轴二。
7、优选地,所述的髋关节上基座包括圆形安装环和连接支杆,所述连接支杆的一端安装在圆形安装环的外环壁上,连接支杆的另一端径向延伸,并铰连接在髋关节万向节中销轴二的两端,髋关节上基座可以绕销轴二进行旋转。
8、优选地,所述的髋关节下基座包括顶部连接座、底部套筒、底部连接耳和两根销轴三;所述的顶部连接座安装在底部套筒的上方,并与髋关节万向节中销轴一的两端转动连接;顶部连接座的两侧各垂直安装有一根销轴三,两根销轴三沿y轴方向同轴布置,所述侧摆偏航直线驱动器的驱动端通过球轴承铰连接在销轴三上;所述的底部连接耳安装在底部套筒上,并倾斜向下延伸,所述的俯仰直线驱动器的驱动端通过轴承铰连接在底部连接耳上;所述的底部套筒套在髋关节俯仰轴上,并可绕髋关节俯仰轴进行旋转。
9、优选地,所述的大腿上设置有顶部连接座、底部连接座、大腿前侧连接耳、后侧上连接耳和后侧下连接耳,所述大腿的顶端通过顶部连接座转动安装在髋关节俯仰轴的两端,所述大腿的底端通过底部连接座转动安装在膝关节转轴的两端;所述大腿的前后两侧设置有一个容置槽,大腿前侧连接耳布置在大腿前侧的容置槽内,并靠近上方的位置处,所述的后侧上连接耳和后侧下连接耳纵向依次布置在大腿后侧的容置槽内,并靠近下方的位置处;所述的膝关节直线驱动器13与俯仰直线驱动器分别布置在大腿前后两侧的容置槽内;膝关节直线驱动器的机身通过轴承连接在大腿前侧连接耳上,膝关节直线驱动器的驱动端通过轴承连接在四连杆曲柄摇杆组件的一个铰接点上,俯仰直线驱动器的机身通过轴承铰连接在后侧上连接耳上。
10、优选地,所述的踝关节万向节组件包括踝关节万向节和踝关节安装座,所述的踝关节万向节包括有两根垂直设置并可旋转的销轴,分别为沿x轴方向设置的销轴四和沿y轴方向设置的销轴五;所述的踝关节安装座固定安装在脚部的脚面上,踝关节万向节通过销轴五转动安装在踝关节安装座上,踝关节安装座及脚部可绕销轴五进行旋转。
11、优选地,所述的小腿上设置有顶部连接套筒、底部连接座和销轴,所述小腿的顶端通过顶部连接套筒套装在膝关节转轴上,并可绕膝关节转轴进行旋转,小腿的底端通过底部连接座安装在踝关节万向节中销轴四的两端,并可绕销轴四进行旋转;所述小腿的左右两侧各设置有一个容置槽,踝关节驱动器处于容置槽内;所述的销轴沿x轴方向插装在小腿上,踝关节驱动器的机身端通过球轴承连接在销轴的端部,踝关节驱动器的驱动端通过球轴承连接在底部连接座上。
12、优选地,所述的四连杆曲柄摇杆组件是由膝关节连杆一、膝关节连杆二、小腿前侧连接耳和大腿的底部连接座构成,所述膝关节连杆一的一端、膝关节连杆二的一端与膝关节直线驱动器的驱动端由一根销轴串联在一起,膝关节连杆一的另一端穿过大腿上竖向开的腰孔并铰连接在后侧下连接耳上;所述的小腿前侧连接耳固定安装在顶部连接套筒上,膝关节连杆二的另一端铰连接在小腿前侧连接耳上。
13、优选地,所述的膝关节连杆一和膝关节连杆二均为带有一定角度的弯折杆,膝关节连杆一和膝关节连杆二以二者的铰接点和膝关节转轴处铰接点的连线为轴对称设置。
14、优选地,所述的侧摆偏航直线驱动器、俯仰直线驱动器、踝关节驱动器和膝关节直线驱动器均为电缸。
15、本发明与现有技术相比产生的有益效果是:
16、1、本发明腿部关节处的驱动部件均采用质量较轻的直线电缸,整体结构简单,降低了整个腿部的制造与设计难度,且各个驱动器不需要根据实际需求各个单独定制,制造难度大大降低。同时,腿部结构利用杠杆原理并在六个直线电缸的驱动下以及球轴承的配合下实现了腿部的侧摆、偏航与俯仰运动、小腿的俯仰运动以及脚部的俯仰、偏航运动,整体结构简单、体积小、质量轻,实现了轻量化的目的。
17、2、本发明在大腿的前后两侧设置有容置槽,用于安装俯仰直线驱动器和膝关节直线驱动器,在小腿的左右两侧设置有容置槽,用于安装两个踝关节驱动器,近似于人腿肌肉牵动,整个腿部布局更加紧凑,外观更加“拟人”。
- 还没有人留言评论。精彩留言会获得点赞!