一种风力发电机组叶片视频监测系统及方法与流程
本发明涉及风电机组叶片监测领域,特别是涉及一种风力发电机组叶片视频监测系统及方法。
背景技术:
1、目前对于风电机组叶片净空的状态监测,可以将图像系统安装在顶部机舱,利用视频将叶片图片采集预处理后传输至图像处理系统,通过计算机视觉技术对图像进行分析,计算出叶片和塔筒间的净空值;对于叶片的外观监测,可以利用无人机进行定期巡检。现有技术中图像采集系统位于塔顶机舱,安装位置比较繁琐,发生故障时维修起来比较麻烦;无人机的巡检也需要人员的配合,拍摄的精确度也有待商榷。
2、基于上述有叶片视频净空和外观监测的缺点,亟待提供一种新的风力发电机组叶片视频监测方法或系统。
技术实现思路
1、本发明的目的是提供一种风力发电机组叶片视频监测系统及方法,能够提高叶片的净空监测和叶片的表面健康状态监测的实时性和准确性。
2、为实现上述目的,本发明提供了如下方案:
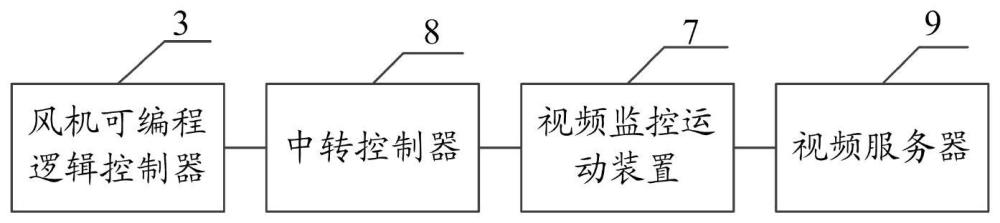
3、一种风力发电机组叶片视频监测系统,包括:风机可编程逻辑控制器、中转控制器、视频监控运动装置以及视频服务器;
4、所述风机可编程逻辑控制器设在机舱处;所述风机可编程逻辑控制器用于获取机舱的偏航角度及方向数据,得到偏航指令;
5、所述中转控制器分别与所述风机可编程逻辑控制器和所述视频监控运动装置连接;所述视频监控运动装置为设置在塔筒上的转盘;所述转盘用于根据中转控制器的控制进行转动或沿塔筒径向运动;
6、所述中转控制器还用于实时显示所述视频监控运动装置的当前位置及速度,进行位置和速度的闭环;
7、所述视频服务器包括:图像采集模块和图像处理模块;所述图像采集模块设置在所述视频监控运动装置上;所述图像采集模块用于采集叶片扫过塔筒的图像;
8、所述图像处理模块用于根据所述图像采集模块采集的叶片扫过塔筒的图像,采用计算机视觉技术进行分析,确定叶片和塔筒间的净空值;所述图像处理模块还用于采用叶片缺陷检测模型对所述图像采集模块采集的叶片扫过塔筒的图像进行缺陷识别;所述叶片缺陷检测模型以叶片扫过塔筒的图像为输入,以定位故障部位和故障类别为输出。
9、可选地,所述图像处理模块与所述中转控制器均设置在塔筒底部。
10、可选地,所述图像采集模块为红外双光摄像头;所述图像处理模块还用于根据红外双光摄像头采集的图像进行温度监测。
11、可选地,所述计算机视觉技术和叶片缺陷检测模型均基于卷积神经网络;所述卷积神经网络包括:输入层、卷积层、池化层、激励层以及全连接层。
12、可选地,所述中转控制器包括:中转站可编程逻辑控制器和人机接口;所述中转站可编程逻辑控制器用于接收偏航指令,并远程控制视频监控运动装置进行运动;所述人机接口用于实时显示所述视频监控运动装置的当前位置及速度,并调节所述视频监控运动装置的运行速度和加减速。
13、可选地,所述的一种风力发电机组叶片视频监测系统,还包括:报警装置;
14、所述报警装置与所述图像处理模块连接。
15、一种风力发电机组叶片视频监测方法,应用于所述的一种风力发电机组叶片视频监测系统;所述的一种风力发电机组叶片视频监测方法,具体包括:
16、利用风机可编程逻辑控制器获取机舱的偏航角度及方向数据,得到偏航指令;
17、中转控制器根据偏航指令控制视频监控运动装置运动;
18、同时图像采集模块采集叶片扫过塔筒的图像;
19、图像处理模块根据叶片扫过塔筒的图像确定叶片和塔筒间的净空值以及缺陷识别结果。
20、可选地,所述图像处理模块根据叶片扫过塔筒的图像确定叶片和塔筒间的净空值以及缺陷识别结果,具体包括:
21、图像处理模块根据叶片扫过塔筒的图像采用计算机视觉技术进行分析,确定叶片和塔筒间的净空值;
22、图像处理模块采用叶片缺陷检测模型对叶片扫过塔筒的图像进行缺陷识别;所述叶片缺陷检测模型以叶片扫过塔筒的图像为输入,以定位故障部位和故障类别为输出。
23、可选地,当图像采集模块为红外双光摄像头时,利用红外双光摄像头获取叶片扫过塔筒的图像;
24、所述图像处理模块根据红外双光摄像头获取叶片扫过塔筒的图像确定叶片的实时温度;并通过数据可视化展示叶片温度的变化趋势;
25、当实时温度超过温度阈值时,进行报警。
26、根据本发明提供的具体实施例,本发明公开了以下技术效果:
27、本发明所提供的一种风力发电机组叶片视频监测系统及方法,风电机组完成偏航运动后,风机可编程逻辑控制器获取机舱的偏航角度及方向数据,得到偏航指令;中转控制器控制视频监控运动装置带动视频监控运动装置一起进行环形运动,并且根据需要做沿塔筒径向运动,偏航结束后,中转控制器实时显示视频监控运动装置的当前位置及速度,进行位置和速度的闭环;图像处理模块根据所述图像采集模块采集的叶片扫过塔筒的图像,采用计算机视觉技术进行分析,确定叶片和塔筒间的净空值以及进行缺陷识别;进而能够提高叶片的净空监测和叶片的表面健康状态监测的实时性和准确性。
技术特征:
1.一种风力发电机组叶片视频监测系统,其特征在于,包括:风机可编程逻辑控制器、中转控制器、视频监控运动装置以及视频服务器;
2.根据权利要求1所述的一种风力发电机组叶片视频监测系统,其特征在于,所述图像处理模块与所述中转控制器均设置在塔筒底部。
3.根据权利要求1所述的一种风力发电机组叶片视频监测系统,其特征在于,所述图像采集模块为红外双光摄像头;所述图像处理模块还用于根据红外双光摄像头采集的图像进行温度监测。
4.根据权利要求1所述的一种风力发电机组叶片视频监测系统,其特征在于,所述计算机视觉技术和叶片缺陷检测模型均基于卷积神经网络;所述卷积神经网络包括:输入层、卷积层、池化层、激励层以及全连接层。
5.根据权利要求1所述的一种风力发电机组叶片视频监测系统,其特征在于,所述中转控制器包括:中转站可编程逻辑控制器和人机接口;所述中转站可编程逻辑控制器用于接收偏航指令,并远程控制视频监控运动装置进行运动;所述人机接口用于实时显示所述视频监控运动装置的当前位置及速度,并调节所述视频监控运动装置的运行速度和加减速。
6.根据权利要求1所述的一种风力发电机组叶片视频监测系统,其特征在于,所述的一种风力发电机组叶片视频监测系统,还包括:报警装置;
7.一种风力发电机组叶片视频监测方法,应用于权利要求1-6任意一项所述的一种风力发电机组叶片视频监测系统;其特征在于,所述的一种风力发电机组叶片视频监测方法,具体包括:
8.根据权利要求7所述的一种风力发电机组叶片视频监测系统,其特征在于,所述图像处理模块根据叶片扫过塔筒的图像确定叶片和塔筒间的净空值以及缺陷识别结果,具体包括:
9.根据权利要求8所述的一种风力发电机组叶片视频监测系统,其特征在于,当图像采集模块为红外双光摄像头时,利用红外双光摄像头获取叶片扫过塔筒的图像;
技术总结
本发明公开一种风力发电机组叶片视频监测系统及方法,涉及风电机组叶片监测领域,该系统中风机可编程逻辑控制器设在机舱处,并获取机舱的偏航角度及方向数据,得到偏航指令;视频监控运动装置为设置在塔筒上的转盘;转盘根据中转控制器的控制进行转动或沿塔筒径向运动;中转控制器实时显示视频监控运动装置的当前位置及速度,进行位置和速度的闭环;视频服务器包括:图像采集模块和图像处理模块;图像采集模块设置在视频监控运动装置上;图像采集模块用于采集叶片扫过塔筒的图像;图像处理模块用于根据叶片扫过塔筒的图像确定叶片和塔筒间的净空值和缺陷识别结果。本发明能够提高叶片的净空监测和叶片的表面健康状态监测的实时性和准确性。
技术研发人员:刘东海,沙德生,张庆,刘兴伟,周利鹏,马斌,石永利,巴特尔,王瀚晨,冯琪,王树洋
受保护的技术使用者:华能陈巴尔虎旗风力发电有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!