一种单电机驱动可变形攀爬巡检机器人及控制方法与流程
本发明属于巡检机器人,具体涉及一种单电机驱动可变形攀爬巡检机器人及控制方法。
背景技术:
1、目前空气质量、大气环境等监测塔大多由工人穿戴绳索攀爬到工作位置进行检修以及安装相关监测传感器,由于监测塔通常较高且不易攀爬,同时高空作业有强风、低温等不确定性因素,采用人工检修的方式危险性高,且效率及稳定性难以得到保证。攀爬式巡检机器人作为一种代替人工的方案,具有很高的研究价值,要求机器人具有更轻的质量和简单可靠的结构,现有的爬塔巡检机器人普遍结构复杂、驱动电机数量多、质量偏大,可靠性一般,加工制造的成本高,适应不同类型的监测塔能力差。简化爬塔机器人结构、减轻巡检机器人的质量、减少驱动电机数量、提升工作可靠性和普适性是当前需要解决的问题。
2、因此,亟需设计一种轻质、经济效益高、结构简单、驱动电机少且可靠性高的攀爬巡检机器人。
技术实现思路
1、为了解决现有技术存在的结构复杂、整体重量较大、普适性较低、驱动电机过多等技术难题,本发明提供一种单电机驱动可变形攀爬巡检机器人及控制方法,包括车体和驱动系统。
2、所述车体包括本体一、本体二和本体三,本体一的一端与本体二的一端通过轴转动连接,本体一另一端的两侧对称设置有两个主动轮,主动轮与本体一通过轴连接,本体二的另一端对称设置有两个从动轮,从动轮与本体二通过轴转动连接,本体三的一端与本体二的中部转动连接,本体三的另一端对称设置有两个相对的被动轮;所述主动轮的轮面设置有柔性铁磁材质的吸附带;所述驱动系统与主动轮传动连接,主动轮与被动轮传动连接,驱动系统工作时能够带动主动轮和被动轮转动。
3、所述驱动系统包括与本体一固定连接的电机和电源,电机与主动轮机械传动连接,电机转动时能够带动主动轮转动,电源与电机电连接并为电机供电;两个主动轮分别设置有与主动轮同轴固定连接的收线槽一、收线槽二;与收线槽一同侧的被动轮设置有与被动轮同轴固定连接的放线槽,柔索一的一端与放线槽固定连接并将柔索一紧密缠绕于放线槽内,柔索一的另一端与收线槽一固定连接并将柔索一收紧,主动轮旋转时带动收线槽一旋转并将柔索一缠绕于收线槽一内,进而拉动柔索一运动,柔索一进一步带动被动轮转动。
4、所述车体还设置有连接本体一与本体二的弹簧扣,所述弹簧扣为弹性杆状结构,弹簧扣拉伸后能够产生收缩的恢复力,弹簧扣的一端与本体一固定连接,另一端与本体二固定连接,翻越阳角时弹簧扣能够通过弹力收缩本体一与本体二之间夹角。
5、所述本体二设置有与收线槽同侧的放线轮,放线轮与本体二转动连接,柔索二的一端与放线轮固定连接并缠绕在放线轮中,柔索二的另一端与收线槽二固定连接并将柔索二拉紧,主动轮转动时带动收线槽二转动,预留在放线轮上的柔索二的长度根据行进距离和攀爬高度进行设置。
6、所述本体一与本体二连接的一端的两侧还设置有两个辅助翻越轮,辅助翻越轮与本体一转动连接。
7、所述吸附带材质为泡沫胶带。
8、所述本体二中部设置有对本体三起到限位作用的桁架梁二,当本体三与本体二展开到特定角度时,本体三与桁架梁二抵接,限制本体三进一步展开。
9、所述本体二上部设置有对本体一起到限位作用的桁架梁一,当本体一与本体二折叠到特定夹角时,本体一与桁架梁一抵接,限制本体一进一步折叠。
10、所述本体二下部设置有对本体三起到限位作用桁架梁三,当本体三与本体二折叠到特定夹角时,本体三与桁架梁三抵接,限制本体三进一步折叠。
11、本发明还提供一种单电机驱动的磁吸式巡检机器人的控制方法,包括以下步骤:
12、步骤一、在地面铺设行进导轨,在检测塔侧面铺设攀爬导轨,根据行进距离和攀爬高度调整放线槽中预留的柔索一长度和放线轮中预留的柔索二长度;调整车体姿态使本体一与本体二构成“7”字形结构,本体二与本体三构成“人字形结构”,从动轮和被动轮同时与行进导轨接触;
13、步骤二、启动装置,电机带动主动轮转动,收线槽一收缩柔索一,从而带动被动轮转动使车体沿行进导轨前进;
14、步骤三、车体前进至主动轮与攀爬导轨接触时,主动轮吸附于攀爬导轨表面,主动轮转动带动车体沿攀爬导轨向上运动,被动轮转动推动车体向前运动,车体沿攀爬导轨上升并逐渐改变车体姿态,本体一与本体二之间的夹角逐渐增大进而展开,本体二与本体三之间的夹角逐渐减小进而折叠,当车体爬升到一定高度时,从动轮脱离行进导轨;
15、步骤四、车体完全脱离行进导轨后,车体继续爬升,在自身重力的作用下,本体一与本体二之间的夹角进一步增大进而展开成“一”字型结构,本体二与本体三之间的夹角进一步减小进而折叠;
16、步骤五、车体继续爬升至攀爬导轨顶端,当主动轮越过阳角后沿着塔顶工作区继续向前运动,弹簧扣收缩本体一与本体二之间夹角,提供本体一和本体二间收缩力,并起到对本体二的过渡支撑作用,减小本体二翻越阳角时所需要的扭矩;同时,辅助翻越轮接触阳角,减小翻越过程中的摩擦力并避免本体一与本体二连接处卡在阳角处;
17、步骤六、车体完全进入塔顶工作区后,主动轮继续前进,放线轮上预缠绕的柔索二刚好释放完毕,收线槽二拉动本体二折叠。
18、本发明的技术效果为:
19、本发明的一种单电机驱动可变形攀爬巡检机器人及控制方法,用于解决目前人工攀爬监测塔危险性高的问题,在突发情况下,能够将本装置行驶到指定位置代替监测塔损坏的检测器,实现应急监测。本发明采用单电机进行驱动,控制简单可靠。且车体能够自行调节姿态以适应不同工作阶段,在“行进阶段”,本体二与本体三构成稳定的“人”字形结构以对车体进行支撑,本体一与本体二构成“7”字形结构以抬高主动轮,避免主动轮在阴角处产生较大阻抗扭矩,同时避免吸附带污染;在“攀爬阶段”,能够自行展开车身,使车身重心靠近攀爬导轨,减小主动轮负载;在“塔顶工作阶段”,能够自行折叠车身从而减小工作占用面积。
技术特征:
1.一种单电机驱动可变形攀爬巡检机器人,包括车体和驱动系统,其特征在于:
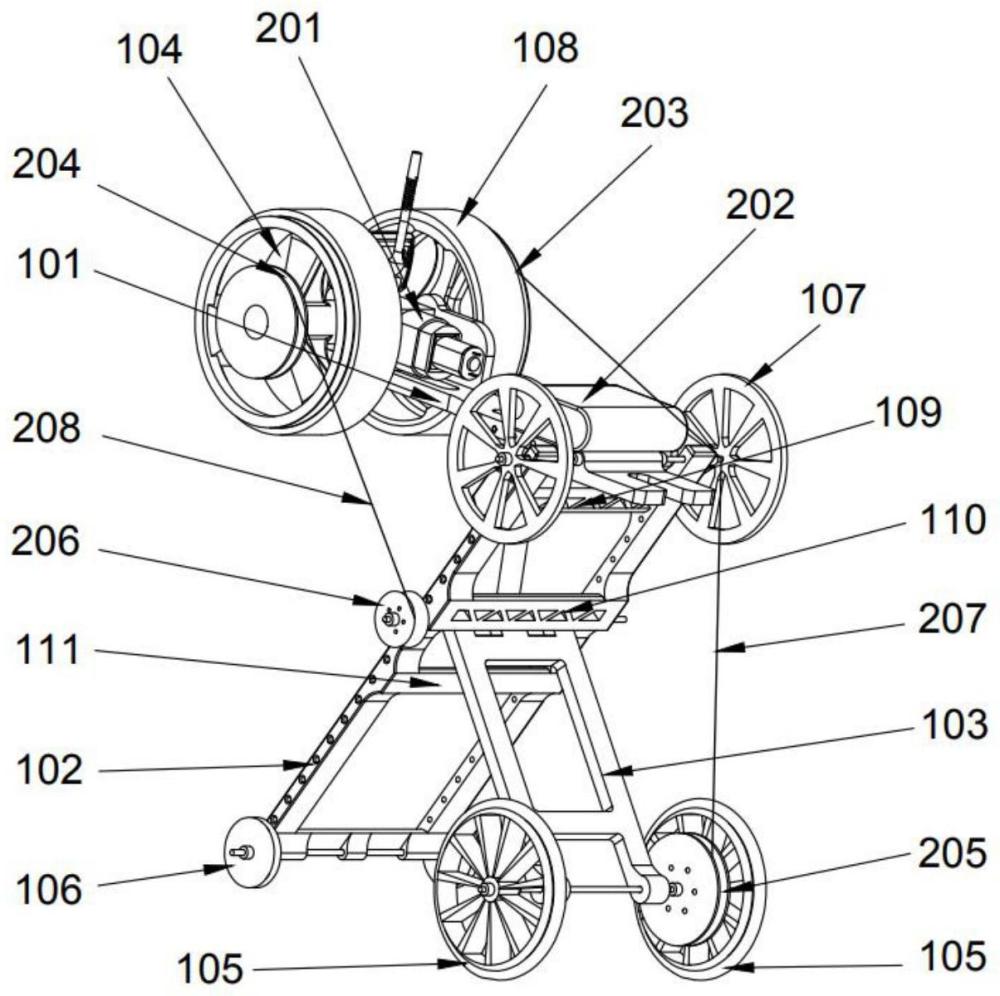
2.根据权利要求1所述的一种单电机驱动可变形攀爬巡检机器人,其特征在于:所述驱动系统包括与本体一(101)固定连接的电机(201)和电源(202),电机(201)与主动轮(104)机械传动连接,电机(201)转动时能够带动主动轮(104)转动,电源(202)与电机(201)电连接并为电机(201)供电;两个主动轮(104)分别设置有与主动轮(104)同轴固定连接的收线槽一(203)、收线槽二(204);与收线槽一(203)同侧的被动轮(105)设置有与被动轮(105)同轴固定连接的放线槽(205),柔索一(207)的一端与放线槽(205)固定连接并将柔索一(207)紧密缠绕于放线槽(205)内,柔索一(207)的另一端与收线槽一(203)固定连接并将柔索一(207)收紧,主动轮(104)旋转时带动收线槽一(203)旋转并将柔索一(207)缠绕于收线槽一(203)内,进而拉动柔索一(207)运动,柔索一(207)进一步带动被动轮(105)转动。
3.根据权利要求2所述的一种单电机驱动可变形攀爬巡检机器人,其特征在于:所述车体还设置有连接本体一(101)与本体二(102)的弹簧扣(209),所述弹簧扣(209)为弹性杆状结构,弹簧扣(209)拉伸后能够产生收缩的恢复力,弹簧扣(209)的一端与本体一(101)固定连接,另一端与本体二(102)固定连接,翻越阳角时弹簧扣(209)能够通过弹力收缩本体一(101)与本体二(102)之间夹角。
4.根据权利要求3所述的一种单电机驱动可变形攀爬巡检机器人,其特征在于:所述本体二(102)设置有与收线槽(204)同侧的放线轮(206),放线轮(206)与本体二(102)转动连接,柔索二(208)的一端与放线轮(206)固定连接并缠绕在放线轮(206)中,柔索二(208)的另一端与收线槽二(204)固定连接并将柔索二(208)拉紧,主动轮(104)转动时带动收线槽二(204)转动,预留在放线轮(206)上的柔索二(208)的长度根据行进距离和攀爬高度进行设置。
5.根据权利要求4所述的一种单电机驱动可变形攀爬巡检机器人,其特征在于:所述本体一(101)与本体二(102)连接的一端的两侧还设置有两个辅助翻越轮(107),辅助翻越轮(107)与本体一(101)转动连接。
6.根据权利要求1-5任一项所述的一种单电机驱动可变形攀爬巡检机器人,其特征在于:所述吸附带(108)材质为泡沫胶带。
7.根据权利要求1-5任一项所述的一种单电机驱动可变形攀爬巡检机器人,其特征在于:所述本体二(102)中部设置有对本体三起到限位作用的桁架梁二(110),当本体三(103)与本体二展开到特定角度时,本体三(103)与桁架梁二(110)抵接,限制本体三(103)进一步展开。
8.根据权利要求1-5任一项所述的一种单电机驱动可变形攀爬巡检机器人,其特征在于:本体二(102)上部设置有对本体一(101)起到限位作用的桁架梁一(109),当本体一(101)与本体二(102)折叠到特定夹角时,本体一(101)与桁架梁一(109)抵接,限制本体一(101)进一步折叠。
9.根据权利要求1-5任一项所述的一种单电机驱动可变形攀爬巡检机器人,其特征在于:本体二(102)下部设置有对本体三(103)起到限位作用桁架梁三(111),当本体三(103)与本体二(102)折叠到特定夹角时,本体三(103)与桁架梁三(111)抵接,限制本体三(103)进一步折叠。
10.一种单电机驱动可变形攀爬巡检机器人的控制方法,采用权利要求5所述的装置实现,包括以下步骤:
技术总结
本发明属于巡检机器人技术领域,具体涉及一种单电机驱动可变形攀爬巡检机器人及控制方法,包括车体和驱动系统,车体包括本体一、本体二和本体三,本体一的一端与本体二的一端通过轴转动连接,本体三的一端与本体二的中部转动连接,车体能够自行调节姿态以适应不同工作阶段,在“行进阶段”,本体二与本体三构成“人”字形结构以对车体进行支撑,本体一与本体二构成“7”字形结构以抬高主动轮,避免主动轮在阴角处产生较大阻抗扭矩,同时避免吸附带污染;在“攀爬阶段”,能够自行展开车身,使车身重心靠近攀爬导轨,减小主动轮负载;在“塔顶工作阶段”,能够自行折叠车身从而减小工作占用面积。
技术研发人员:曲胜麟
受保护的技术使用者:曲胜麟
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!