智能转向调节方法、系统、电子设备、车辆及存储介质与流程
本发明涉及汽车辆转向控制,具体涉及智能转向调节方法、系统、电子设备、车辆及存储介质。
背景技术:
1、车辆转向系统是用来保持或改变汽车行驶方向的机构,可实现转向盘到转向轮的动力传递,当驾驶员通过手力控制前轮转角时,以保证车辆按照驾驶员的意志改变行驶方向。
2、现有转向系统无法实现对转向扭矩的动态主动调控,当车辆处于高速行驶和急转弯等复杂驾驶场景下,无法保持车辆的稳定转向,从而影响驾驶体验和安全性。
3、现有转向力模式一般只有轻便、标准和稳重三种模式(比如:设置轻便模式下的转向助力百分比为0%,标准模式下的转向助力百分比为50%,稳重模式下的转向助力百分比为100%;在相同的原始请求扭矩和车速下,转向助力百分比不同,所对应的电动助力转向输出扭矩不同,具体对应关系通过标定得到),而车辆使用场景较为复杂,故三种转向力模式无法适配不同用车场景。另外,转向电机扭矩强度未与驾驶模式相关联,当转向力模式设置好后,每种驾驶模式都被设置为同一种转向力模式(比如:当车辆的转向力模式设置为轻便时,此时车辆不管处于哪个驾驶模式,其转向力模式均为轻便),即无法针对不同驾驶模式设置不同转向电机扭矩,从而会出现转向力模式设置不当的问题,导致驾驶强度高、驾驶舒适性低,甚至影响驾驶安全。
4、如专利文献cn 209511049u公开的一种无级变速转向机构,该转向机构通过电动驱动件可以根据车辆的转速以及方向盘的转向,自动控制无级变速器变速以及变速快慢。但未与整车各控制单元关联,未实现与整车智能交互驾乘体验。
5、又如专利文献cn 116373995a公开了一种转向偏离修正的控制方法,包括补偿算法未激活状态、补偿算法激活中状态、补偿算法激活状态、补偿算法保持状态、渐出状态之间的状态跳转以及各个状态的齿条补偿力计算。该方法虽能够应对道路倾斜或持续横风的驾驶环境,实时检测道路状况并提供转向补偿,减少驾驶员保持车辆直线行驶所需的转向力,降低驾驶员的驾驶强度,提高驾驶舒适性,改善驾驶体验。但存在以下不足点:
6、(1)只是描述了单一场景下道路倾斜或持续横风对转向扭矩影响的修正控制方法;
7、(2)但实际整车场景较为复杂,上该方法未综合考虑道路线性曲率和坡度值与输出的转向扭矩映射关系,输出的转向扭矩较不完整,不能完美适应所有转向需求场景。
8、因此,有必要提供一种新的智能转向调节方法、系统、电子设备、车辆及存储介质。
技术实现思路
1、本发明的目的在于提供智能转向调节方法、系统、电子设备、车辆及存储介质,能主动对转向扭矩进行动态精准调控,且能适配不同用车场景。
2、第一方面,本发明所述的一种智能转向调节方法,包括以下步骤:
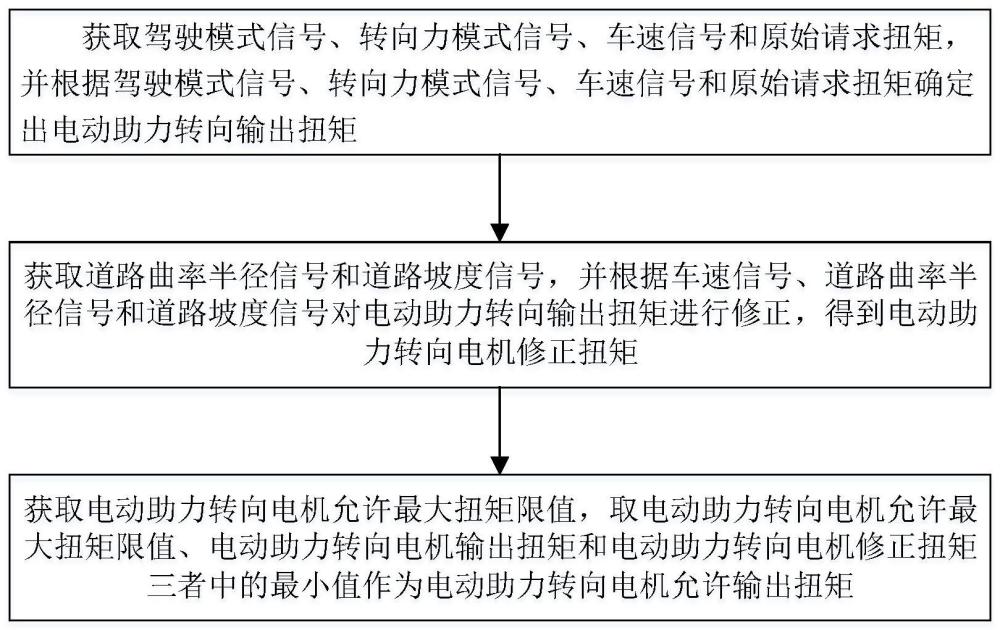
3、获取驾驶模式信号、转向力模式信号、车速信号和原始请求扭矩,并根据驾驶模式信号、转向力模式信号、车速信号和原始请求扭矩确定出电动助力转向输出扭矩;
4、获取道路曲率半径信号和道路坡度信号,并根据车速信号、道路曲率半径信号和道路坡度信号对电动助力转向输出扭矩进行修正,得到电动助力转向电机修正扭矩;
5、获取电动助力转向电机允许最大扭矩限值,取电动助力转向电机允许最大扭矩限值、电动助力转向电机输出扭矩和电动助力转向电机修正扭矩三者中的最小值作为电动助力转向电机允许输出扭矩。
6、可选地,根据车速信号、道路曲率半径信号和道路坡度信号对电动助力转向输出扭矩进行修正,具体为:
7、根据车速和道路曲率半径查道路曲率半径、车速与道路线性修正系数的对应关系表,得到道路线性修正系数;
8、根据道路坡度查道路坡度和坡度修正系数的对应关系表,得到坡度修正系数;
9、基于道路线性修正系数、坡度修正系数对电动助力转向输出扭矩进行修正,得到电动助力转向电机修正扭矩。本发明综合根据车辆的当前车速和导航信息(道路曲率半径、坡度)等动态参数,对转向扭矩进行动态精准地主动调控,确保了车辆在转弯过程中的稳定性和平衡性。这种基于车辆动态参数的精准控制策略,使得车辆能够在高速行驶和急转弯等复杂驾驶场景下依然保持稳定和安全。
10、可选地,所述电动助力转向电机修正扭矩的计算公式为:
11、n修正=(1+b1×k1+b2×k2)×nassisttbl;
12、其中:n修正为电动助力转向电机修正扭矩,k1为道路线性修正系数,k2为坡度修正系数,b1、b2分别为道路线性修正系数、坡度修正系数在修正计算中所占的权重,nassisttbl为电动助力转向输出扭矩。本发明进一步实现了对转向扭矩进行动态精准的主动调控。
13、可选地,所述根据驾驶模式信号、转向力模式信号、车速信号和原始请求扭矩确定出电动助力转向输出扭矩,具体为:
14、根据驾驶模式信号、转向力模式信号确认出当前驾驶模式下的电动助力转向输出扭矩查询表;
15、根据车速信号和原始请求扭矩查当前驾驶模式下的电动助力转向输出扭矩查询表,得到电动助力转向输出扭矩。本发明通过将转向力模式和驾驶模式相关联,即实现了不同驾驶模式设置不同转向电机扭矩,从而提高了驾驶舒适性和驾驶安全性。
16、可选地,所述驾驶模式设置有至少两种模式供选择;
17、所述转向力模式设置有至少两种模式供选择,且不同转向力模式所对应的转向助力百分比不同;
18、获取当前车辆所设置的驾驶模式,并发出对应的驾驶模式信号;
19、获取当前车辆所设置的转向力模式,并发出对应的转向力模式信号。
20、可选地,所述驾驶模式配置有经济模式、舒适模式和运动模式;
21、所述转向力模式配置有轻便模式、标准模式、稳重模式,以及用于设置不同转向力模式的转向助力百分比的自定义模式。
22、可选地,所述轻便模式的转向助力百分比为a1%;所述标准模式的转向助力百分比为a2%;所述稳重模式的转向助力百分比为a3%;其中,a1%<a2%<a3%。
23、可选地,根据驾驶模式信号、转向力模式信号确认出当前驾驶模式下的电动助力转向输出扭矩查询表,具体为;
24、根据驾驶模式信号、转向力模式信号确定出当前驾驶模式下的转向助力百分比为c%,其中c%为0%-100%之间的任意值;
25、从预设的不同转向助力百分比下的原始请求扭矩、驾驶模式、车速与电动助力转向输出扭矩的对应关系表中,提取出在转向助力百分比为c%下的原始请求扭矩、驾驶模式、车速与电动助力转向输出扭矩的对应关系数据,并生成当前驾驶模式下的电动助力转向输出扭矩查询表。本发明设置有自定义模式,使此方法能够适配不同用车场景。
26、第二方面,本发明所述的一种智能转向调节系统,包括人机交互模块、高精度导航模块、电动助力转向控制模块和集成制动控制模块,人机交互模块、高精度导航模块、电动助力转向控制模块和集成制动控制模块分别建立通信连接;
27、所述人机交互模块用于设置转向力模式和驾驶模式;
28、所述高精度导航模块用于提供道路曲率度信号和道路坡度信号;
29、所述电动助力转向控制模块用于提供原始请求扭矩;
30、所述集成制动控制模块用于监测车辆的车速信号;
31、所述智能转向调节系统被配置为能执行如本发明所述的智能转向调节方法的步骤。
32、第三方面,本发明所述的一种车辆,采用如本发明所述的智能转向调节系统。
33、第四方面,本发明所述的一种电子设备,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时,能执行如本发明所述的智能转向调节方法的步骤。
34、第五方面,本发明所述的一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时,能执行如本发明所述的智能转向调节方法的步骤。
35、本发明的有益效果:
36、(1)本发明综合根据车辆的当前车速和导航信息(道路曲率半径、坡度)等动态参数,对转向扭矩进行动态精准地主动调控,确保了车辆在转弯过程中的稳定性和平衡性。这种基于车辆动态参数的精准控制策略,使得车辆能够在高速行驶和急转弯等复杂驾驶场景下依然保持稳定和安全。
37、(2)本发明通过将转向力模式和驾驶模式相关联,同时转向力模式还配置有自定义模式供用户选择,即实现了不同驾驶模式设置不同转向电机扭矩,能够适配不同用车场景,进一步提高了驾驶舒适性和驾驶安全性。
38、综上所述,本发明能够对车辆转向进行精确控制,能够实现更高的转向控制精度。无论是在高速行驶还是低速转弯时,该方法都能够保证车辆转向的准确性,从而提高了驾驶的安全性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!