一种适用于泥地下陷履带的辅助行走装备与智能控制系统及控制方法
本发明涉及农业机械设备领域,特别涉及一种适用于泥地下陷履带的辅助行走装备与智能控制系统及控制方法。
背景技术:
1、目前,履带由于有接地比压低,保护土壤、在旱地避免形成犁底层,保墒防旱、水田防止破坏硬底层,保证水田正常耕作等优点被广泛应用于各类机械,特别是农业机械。当目前履带式机械普遍存在的问题是,行走路面湿度过大时,将呈现湿软或深泥脚的特征,履带式机械因其具有接地比压低、通过性好及爬坡能力强等优势,被应用于野外工作机械中,在湿软或深泥脚田间也应用广泛。
2、然而履带式机械在湿软泥脚稻田田间收获时,常常会出现打滑、下陷等问题,导致机械被困于泥地中,这导致履带机械需要应用其他机械进行脱困,这不仅提高了现有履带式机械的脱困成本,也限制了现有履带式机械的通行能力;同时,现有履带式机械缺乏一种安全监测控制装置,无法对泥地中的障碍物、以及地面情况预和履带的各项参数的监测与反馈系统,这导致现有履带式机械的智能化监测有所欠缺。
技术实现思路
1、针对现有技术中存在的不足,本发明提供了一种适用于泥地下陷履带的辅助行走装备与智能控制系统及控制方法,可对现有履带装置的两条履带的动力进行优化输出,当其中一条履带脱离地面、打滑等情况时,会将两条履带的电力输出功率集中的另一条,以提高另一条履带的整体动力,这使得整体机械在更低的电能供应下,实现对陷入泥地下的两条履带动力的最大输出优化;同时该辅助行走装备与智能控制系统设有辅助行走履带装置,可以以任意角度贴合地面为主履带提供额外动力供应,且辅助行走履带装置的两条履带的动力也与主履带相同,可将两条履带的动力集中的一条上,当其中一条主履带脱离地面、打滑等情况时,系统会自动调整辅助行走履带装置以整体装置相对应的角度贴合地面,可将整体装置支撑起来,进而辅助整体装置脱离泥地;同时调整辅助行走履带装置和主履带同时接触地面时,会提高整体装置与泥地的接触面积,进而减速整体装置的下陷程度,提高整体履带装置在泥地的通行性;另外辅助行走装备与智能控制系统设有安全预警装置,可对下陷与泥地中看不见的障碍物进行监测,提高了整体履带装置的安全运行性。
2、本发明是通过以下技术手段实现上述技术目的的。
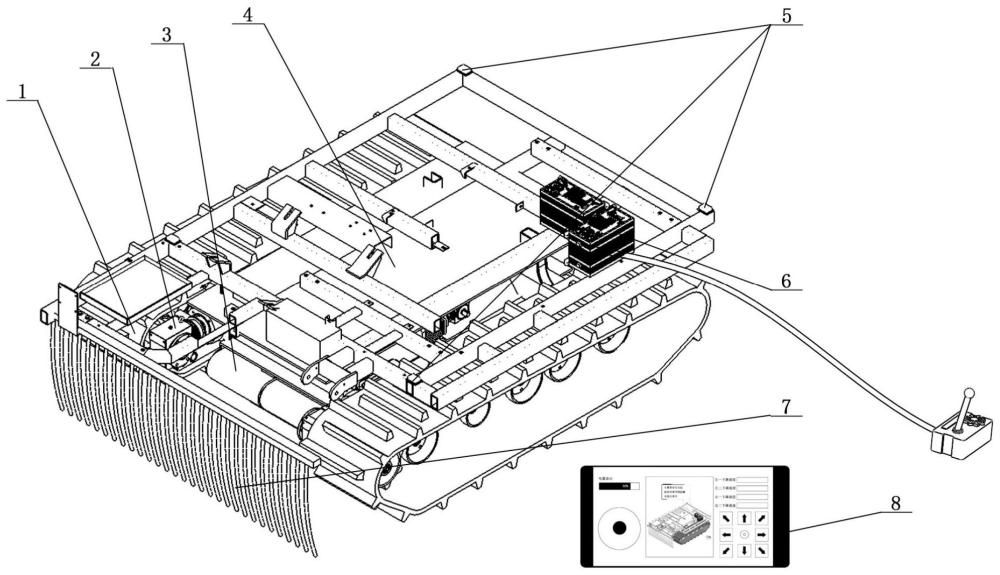
3、一种适用于泥地下陷履带的辅助行走装备与智能控制系统,包括履带底盘、双电机式动力系统、辅助行进履带装置、辅助履带六位调节装置、履带倾斜动力监测系统和中心控制平台;
4、所述双电机式动力系统位于履带底盘履带驱动轮两侧,所述双电机式动力系统分别驱动履带底盘两侧的主履带;所述双电机式动力系统中设有电机驱动器用于分配驱动履带底盘两侧主履带的电机的电能大小;
5、所述辅助行进履带装置包括2个独立旋转的辅助行进履带、固定板、辅助驱动装置和辅助行进电机驱动装置,所述辅助驱动装置分别驱动辅助行进履带;所述2个独立旋转的辅助行进履带分别安装在固定板上,所述辅助驱动装置位于固定板上方;所述辅助行进电机驱动装置用于分配驱动辅助行进履带的辅助驱动装置的电能大小;
6、所述辅助行进履带装置通过辅助履带六位调节装置安装在履带底盘底部;所述辅助履带六位调节装置包括4个升降执行单元和支架板固定架,每个升降执行单元的一端通过第一球面装置与固定板连接,每个升降执行单元的另一端通过第二球面装置与支架板固定架连接,所述支架板固定架安装在履带底盘上;
7、所述履带倾斜动力监测系统包括二组角度监测传感器、角加速度传感器ⅰ、传动扭矩传感器ⅰ、传动扭矩传感器ⅱ和角加速度传感器ⅱ;一组角度监测传感器用于检测履带底盘横向角度偏移量;另一组角度监测传感器用于检测履带底盘纵向角度偏移量;所述传动扭矩传感器ⅰ用于检测履带底盘的左履带的扭矩;所述传动扭矩传感器ⅱ用于检测履带底盘的右履带的扭矩;所述角加速度传感器ⅰ用于检测左履带的角加速度;所述角加速度传感器ⅱ用于检测右履带的角加速度;
8、所述中心控制平台根据角加速度传感器ⅰ、传动扭矩传感器ⅰ、传动扭矩传感器ⅱ和角加速度传感器ⅱ的检测值调节两侧主履带的动力分配和两个辅助行进履带的动力分配;所述中心控制平台根据二组角度监测传感器的检测值通过调节4个升降执行单元的伸缩量从而改变辅助行进履带装置的角度。
9、进一步,4个升降执行单元安装在固定板的四个角,所述每个升降执行单元的一端与第一球面装置球副连接;所述每个升降执行单元的另一端与第二球面装置球副连接,且第二球面装置上设有挡块,用于使升降执行单元的另一端沿对角线旋转。
10、进一步,所述角度监测传感器包括角度监测传感器ⅰ、角度监测传感器ⅱ、角度监测传感器ⅲ和角度监测传感器ⅳ;所述角度监测传感器ⅰ和角度监测传感器ⅳ为一组角度监测传感器,所述角度监测传感器ⅱ和角度监测传感器ⅲ为另一组角度监测传感器;所述中心控制平台根据二组角度监测传感器的检测值确定履带底盘的姿态,所述中心控制平台根据履带底盘的姿态分别调节4个升降执行单元伸缩长度,使辅助行进履带装置以相同的姿态与地面接触。
11、进一步,所述中心控制平台根据角加速度传感器ⅰ和角加速度传感器ⅱ的检测值判断左履带或右履带是否出现打滑;若角加速度传感器ⅰ的检测值超过第一预设值时,左履带出现打滑;若角加速度传感器ⅱ的检测值超过第一预设值时,右履带出现打滑;所述第一预设值为启动阶段的履带角加速度。
12、进一步,所述中心控制平台根据传动扭矩传感器ⅰ和传动扭矩传感器ⅱ的检测值判断左履带或右履带是否动力不足;若角加速度传感器ⅰ的检测值小于扭矩额定值t额时,左履带动力不足;若角加速度传感器ⅱ的检测值小于扭矩额定值t额时,右履带动力不足;所述扭矩额定值t额为正常行驶过程中的额定扭矩。
13、进一步,所述中心控制平台根据角加速度传感器ⅰ和角加速度传感器ⅱ的检测值确定一侧履带打滑时,所述中心控制平台将另一侧未打滑的履带动力部分输送给打滑侧的履带或者所述中心控制平台控制辅助行进履带装置对打滑侧提供辅助动力。
14、进一步,所述中心控制平台根据传动扭矩传感器ⅰ和传动扭矩传感器ⅱ的检测值确定一侧履带动力不足时,所述中心控制平台控制辅助行进履带装置对打滑侧提供辅助动力。
15、进一步,所述履带底盘上安装土壤硬度检测装置,用于检测行走方向前面土壤硬度;所述土壤硬度检测装置包括湿度传感器杆和压力传感器杆;所述湿度传感器杆用于监测行驶前方泥地的湿度;所述压力传感器杆用于监测行驶前方是否存在障碍物。
16、一种适用于泥地下陷履带的辅助行走装备与智能控制系统的控制方法,包括如下步骤:
17、通过角加速度传感器ⅰ和角加速度传感器ⅱ分别检测履带底盘履带驱动轮两侧履带的角加速度,若角加速度传感器ⅰ或角加速度传感器ⅱ的检测值大于第一预设值时,则所述中心控制平台确定一侧履带打滑;
18、若角加速度传感器ⅰ或角加速度传感器ⅱ的检测值大于第一预设值,且小于第二预设值时,所述中心控制平台将一侧打滑的履带的20%~50%的动力转移到另一侧未打滑的履带上;
19、若角加速度传感器ⅰ或角加速度传感器ⅱ的检测值大于第二预设值,且小于第三预设值时,所述中心控制平台控制辅助履带六位调节装置使辅助行进履带装置与地面接触;所述中心控制平台控制2个独立旋转的辅助行进履带辅助行走;
20、若角加速度传感器ⅰ或角加速度传感器ⅱ的检测值大于第三预设值,且小于第四预设值时,所述中心控制平台控制辅助履带六位调节装置使辅助行进履带装置与地面接触;所述中心控制平台控制2个独立旋转的辅助行进履带辅助行走;所述中心控制平台将一侧打滑的履带的20%~50%的动力转移到另一侧未打滑的履带上,且所述中心控制平台将未打滑侧的一个辅助行进履带的40%~60%的动力转移到打滑侧的另一个辅助行进履带上;
21、若角加速度传感器ⅰ或角加速度传感器ⅱ的检测值大于第四预设值时,所述中心控制平台发出报警信息。
22、一种适用于泥地下陷履带的辅助行走装备与智能控制系统的控制方法,包括如下步骤:
23、通过传动扭矩传感器ⅰ和传动扭矩传感器ⅱ分别检测履带底盘履带驱动轮两侧履带的扭矩,若传动扭矩传感器ⅰ或传动扭矩传感器ⅱ的检测值小于扭矩额定值t额时,则所述中心控制平台确定一侧履带动力不足;
24、若传动扭矩传感器ⅰ或传动扭矩传感器ⅱ的检测值小于扭矩额定值t额,且大于第五预设值时,所述中心控制平台控制辅助履带六位调节装置使辅助行进履带装置与地面接触;所述中心控制平台控制2个独立旋转的辅助行进履带辅助行走;
25、若传动扭矩传感器ⅰ或传动扭矩传感器ⅱ的检测值小于第五预设值,且大于第六预设值时,所述中心控制平台控制辅助履带六位调节装置使辅助行进履带装置与地面接触;所述中心控制平台控制2个独立旋转的辅助行进履带辅助行走;所述中心控制平台将动力充足侧的一个辅助行进履带的40%~60%的动力转移到动力不足的另一个辅助行进履带上;
26、若传动扭矩传感器ⅰ或传动扭矩传感器ⅱ的检测值小于第七预设值时,所述中心控制平台发出报警信息。
27、本发明的有益效果在于:
28、1.本发明所述的适用于泥地下陷履带的辅助行走装备与智能控制系统,所述中心控制平台根据角加速度传感器ⅰ、传动扭矩传感器ⅰ、传动扭矩传感器ⅱ和角加速度传感器ⅱ的检测值调节两侧主履带的动力分配,当一端履带发生打滑、悬空时,可将打滑悬空的履带的电力供应调整到另一未悬空、未打滑的履带上,以更低的电量供应,优化了整体主履带的动力分配,有效提高了整体履带在主履带在打滑、悬空无法完全提供动力供应效果,这使得履带在打滑、悬空等情况中拥有更好的脱困能力。
29、2.本发明所述的适用于泥地下陷履带的辅助行走装备与智能控制系统,设有四个角度倾斜传感器可对整体装置的左右、上下倾斜情况进行监测,并将倾斜情况反馈到辅助行进履带装置的辅助履带六位调节装置中,以调整辅助行进履带装置与地面的接触情况。辅助行进履带装置可以任意角度适应地面的情况,大大提高了辅助行进履带装置在辅助动力、辅助支撑等对地形的适应情况,大大提高了整体履带装置的通行能力与脱困能力。
30、3.本发明所述的适用于泥地下陷履带的辅助行走装备与智能控制系统,若角加速度传感器ⅰ或角加速度传感器ⅱ的检测值大于第三预设值,且小于第四预设值时,所述中心控制平台将一侧打滑的履带的20%~50%的动力转移到另一侧未打滑的履带上,且所述中心控制平台将未打滑侧的一个辅助行进履带的40%~60%的动力转移到打滑侧的另一个辅助行进履带上,可将两条履带上的动力集中的单条履带上,优化了辅助行进履带装置的动力供应的同时,也优化了电能的供应,以更低的电能供应,实现了单条更高动力上限供应,这提高了辅助行进履带装置与整体履带装置对不同的地形情况的适应能力。
31、4.本发明所述的适用于泥地下陷履带的辅助行走装备与智能控制系统,可对整体履带装置前方土壤的湿度进行监测,当监测到前方的湿度达到预设值,系统会对前方泥地可能发生更大陷困进行预警;同时可对泥地中看不见的障碍物进行监测,当监测到有障碍物时,会停止整体履带装置的运行,以免整体履带装置倾覆的可能,这提高了履带装置在未知泥地内运行的安全性,避免了整体履带倾覆后的脱困成本的存在。
- 还没有人留言评论。精彩留言会获得点赞!