一种关节变形行星轮连杆驱动模组及爬壁机器人的制作方法
本技术涉及爬壁机器人,尤其是指一种关节变形行星轮连杆驱动模组及爬壁机器人。
背景技术:
1、随着社会的发展,爬壁机器人的应用越来越广泛。通过爬壁机器人行走至壁面的各个角落,可实现无人检测,也可运载各种加工装置,沿壁面行走并工作。
2、为了适应壁面的行走,现有的爬壁机器人多为吸附式爬壁机器人,其通过磁吸或负压的方式吸附在壁面上,并通过轮体滚动,以此实现爬壁机器人向前行走。现有的爬壁机器人通常具备多个行走模块,行走模块能够吸附在壁面上并滚动前行,从而带动整个爬壁机器人行走。通常,多个行走模块为2×n的阵列排布,其中,n为行走模块的行数,而爬壁机器人一行设置有2个行走模块,多个行走模块位于同一平面,不具备关节变形能力,因此,现有的爬壁机器人不能适应崎岖不平的壁面行走,容易从壁面掉落,稳定性不佳。
技术实现思路
1、为此,本实用新型所要解决的技术问题在于克服现有技术中爬壁机器人不能应崎岖不平的壁面行走,容易从壁面掉落的技术缺陷。
2、为解决上述技术问题,本实用新型提供了一种关节变形行星轮连杆驱动模组,包括机架,所述机架上设置有:
3、第一行走模块;
4、第二行走模块,所述第一行走模块和第二行走模块相对于机架对称设置,所述第一行走模块和第二行走模块皆能够吸附在壁面上并沿壁面行走;
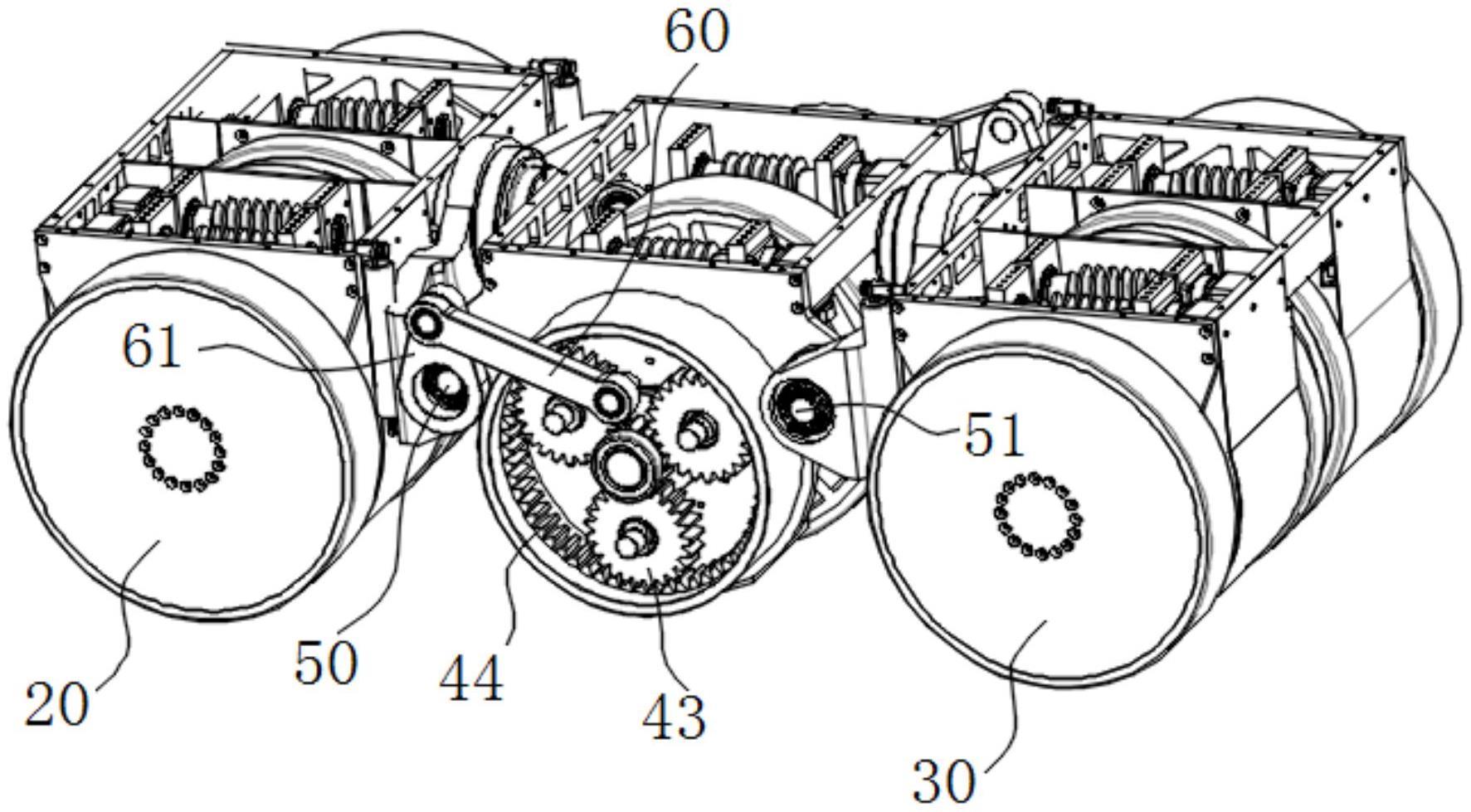
5、第一驱动单元,所述第一驱动单元包括第一驱动源、第一太阳齿轮、第一行星轮、第一行星架、第一齿圈、第一连杆、第一摆杆和第一转轴,所述第一驱动源与第一太阳齿轮连接以驱动第一太阳齿轮转动,所述第一行星轮具有多个,多个所述第一行星轮皆与第一太阳齿轮啮合且环绕所述第一太阳齿轮的周向均匀设置,所述第一齿圈与机架固定设置,多个所述第一行星轮皆与齿圈啮合,多个所述第一行星轮均布在所述第一行星架上,所述第一行星架依次通过第一连杆和第一摆杆与第一转轴连接以带动第一转轴转动,第一行走模块设置在第一转轴上;
6、第二驱动单元,所述第二驱动单元包括第二驱动源、第二太阳齿轮、第二行星轮、第二行星架、第二齿圈、第二连杆、第二摆杆和第二转轴,所述第二驱动源与第二太阳齿轮连接以驱动第二太阳齿轮转动,所述第二行星轮具有多个,多个所述第二行星轮皆与第二太阳齿轮啮合且环绕所述第二太阳齿轮的周向均匀设置,所述第二齿圈与机架固定设置,多个所述第二行星轮皆与齿圈啮合,多个所述第二行星轮均布在所述第二行星架上,所述第二行星架依次通过第二连杆和第二摆杆与第二转轴连接以带动第二转轴转动,第二行走模块设置在第二转轴上;
7、其中,所述第一转轴转动以带动第一行走模块摆动,所述第二转轴转动以带动第二行走模块摆动。
8、作为优选的,所述第一行星架套设在第一太阳齿轮的轮轴上,所述第一行星架与第一太阳齿轮的轮轴之间设置有第一球轴承。
9、作为优选的,所述第二行星架套设在第二太阳齿轮的轮轴上,所述第二行星架与第二太阳齿轮的轮轴之间设置有第二球轴承。
10、作为优选的,多个所述第一行星轮的轮轴与所述第一行星架之间通过第三球轴承连接。
11、作为优选的,多个所述第二行星轮的轮轴与所述第二行星架之间通过第四球轴承连接。
12、作为优选的,所述第一连杆的一端与第一行星架铰接,所述第一连杆的另一端与第一摆杆铰接,所述第一摆杆远离所述第一连杆的一端与第一转轴固定设置。
13、作为优选的,所述第一转轴的两端分别通过第一转动轴承设置在机架上,所述第二转轴的两端分别通过第二转动轴承设置在机架上。
14、作为优选的,所述第二连杆的一端与第二行星架铰接,所述第二连杆的另一端与第二摆杆铰接,所述第二摆杆远离所述第二连杆的一端与第二转轴固定设置。
15、作为优选的,所述第一驱动源和第二驱动源为一体式执行器。
16、本实用新型公开了一种爬壁机器人,包括上述的关节变形行星轮连杆驱动模组。
17、本实用新型的上述技术方案相比现有技术具有以下优点:
18、1、第一驱动源驱动第一太阳齿轮转动,而第一齿圈固定不动,迫使第一行星轮一边绕其轴心自转,同时绕第一太阳齿轮公转。而多个第一行星轮同步绕第一太阳齿轮公转,公转动作迫使第一行星架绕中心轴转动,继而推动第一连杆动作,第一连杆动作使第一摆杆带动第一转轴转动。而由于第一行走模块设置在第一转轴上,第一转轴转动即可带动第一行走模块摆动,从而适应崎岖不平的壁面,灵活性强。
19、2、同样的,第二驱动源驱动第二太阳齿轮转动,而第二齿圈固定不动,迫使第二行星轮一边绕其轴心自转,同时绕第二太阳齿轮公转。而多个第二行星轮同步绕第二太阳齿轮公转,公转动作迫使第二行星架绕中心轴转动,继而推动第二连杆动作,第二连杆动作使第二摆杆带动第二转轴转动。而由于第二行走模块设置在第二转轴上,第二转轴转动即可带动第二行走模块摆动,从而适应崎岖不平的壁面,灵活性强。
20、3、本实用新型通过行星轮、太阳轮、连杆和摆杆配合,以此实现行走模块的高精度摆动,相对于传统的驱动方式,稳定性更好。
技术特征:
1.一种关节变形行星轮连杆驱动模组,其特征在于,包括机架,所述机架上设置有:
2.根据权利要求1所述的关节变形行星轮连杆驱动模组,其特征在于,所述第一行星架套设在第一太阳齿轮的轮轴上,所述第一行星架与第一太阳齿轮的轮轴之间设置有第一球轴承。
3.根据权利要求1所述的关节变形行星轮连杆驱动模组,其特征在于,所述第二行星架套设在第二太阳齿轮的轮轴上,所述第二行星架与第二太阳齿轮的轮轴之间设置有第二球轴承。
4.根据权利要求1所述的关节变形行星轮连杆驱动模组,其特征在于,多个所述第一行星轮的轮轴与所述第一行星架之间通过第三球轴承连接。
5.根据权利要求1所述的关节变形行星轮连杆驱动模组,其特征在于,多个所述第二行星轮的轮轴与所述第二行星架之间通过第四球轴承连接。
6.根据权利要求1所述的关节变形行星轮连杆驱动模组,其特征在于,所述第一连杆的一端与第一行星架铰接,所述第一连杆的另一端与第一摆杆铰接,所述第一摆杆远离所述第一连杆的一端与第一转轴固定设置。
7.根据权利要求1所述的关节变形行星轮连杆驱动模组,其特征在于,所述第一转轴的两端分别通过第一转动轴承设置在机架上,所述第二转轴的两端分别通过第二转动轴承设置在机架上。
8.根据权利要求1所述的关节变形行星轮连杆驱动模组,其特征在于,所述第二连杆的一端与第二行星架铰接,所述第二连杆的另一端与第二摆杆铰接,所述第二摆杆远离所述第二连杆的一端与第二转轴固定设置。
9.根据权利要求1所述的关节变形行星轮连杆驱动模组,其特征在于,所述第一驱动源和第二驱动源为一体式执行器。
10.一种爬壁机器人,其特征在于,包括权利要求1-9任一项所述的关节变形行星轮连杆驱动模组。
技术总结
本技术涉及一种关节变形行星轮连杆驱动模组及爬壁机器人,包括:机架,机架上设置有:相对于机架对称设置得第一行走模块和第二行走模块,第一行走模块和第二行走模块皆能够吸附在壁面上并沿壁面行走;第一驱动单元,第一驱动单元包括第一驱动源、第一太阳齿轮、第一行星轮、第一行星架、第一齿圈、第一连杆、第一摆杆和第一转轴,第一行走模块设置在第一转轴上;第二驱动单元,第二驱动单元包括第二驱动源、第二太阳齿轮、第二行星轮、第二行星架、第二齿圈、第二连杆、第二摆杆和第二转轴,第二行星架依次通过第二连杆和第二摆杆与第二转轴连接,第二行走模块设置在第二转轴上。其能够适应崎岖壁面行走,灵活性高,稳定性好。
技术研发人员:章军福
受保护的技术使用者:江苏镌极特种设备有限公司
技术研发日:20230131
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!