医疗设备的制作方法
本申请涉及医疗,特别涉及一种医疗设备。
背景技术:
1、近年来越来越多的手术机器人被医院采用实施手术过程。手术机器人往往都安装有脚轮,以方便移动。在手术机器人移动到预定位置时,又需要驻停,使其完全不能够移动,确保整个手术过程中的安全可靠。
2、目前,在手术机器人的脚轮上设置有刹车器,用于手术机器人的驻停,但是这种方式并不能完全保证手术机器人在驻停状态时的稳定性和可靠性。有鉴于此,亟需对手术机器人上的驻停结构进行改进。
技术实现思路
1、鉴于上述问题,本申请提供了一种医疗设备,能够有效地提高医疗设备在驻停状态时的稳定性和可靠性。
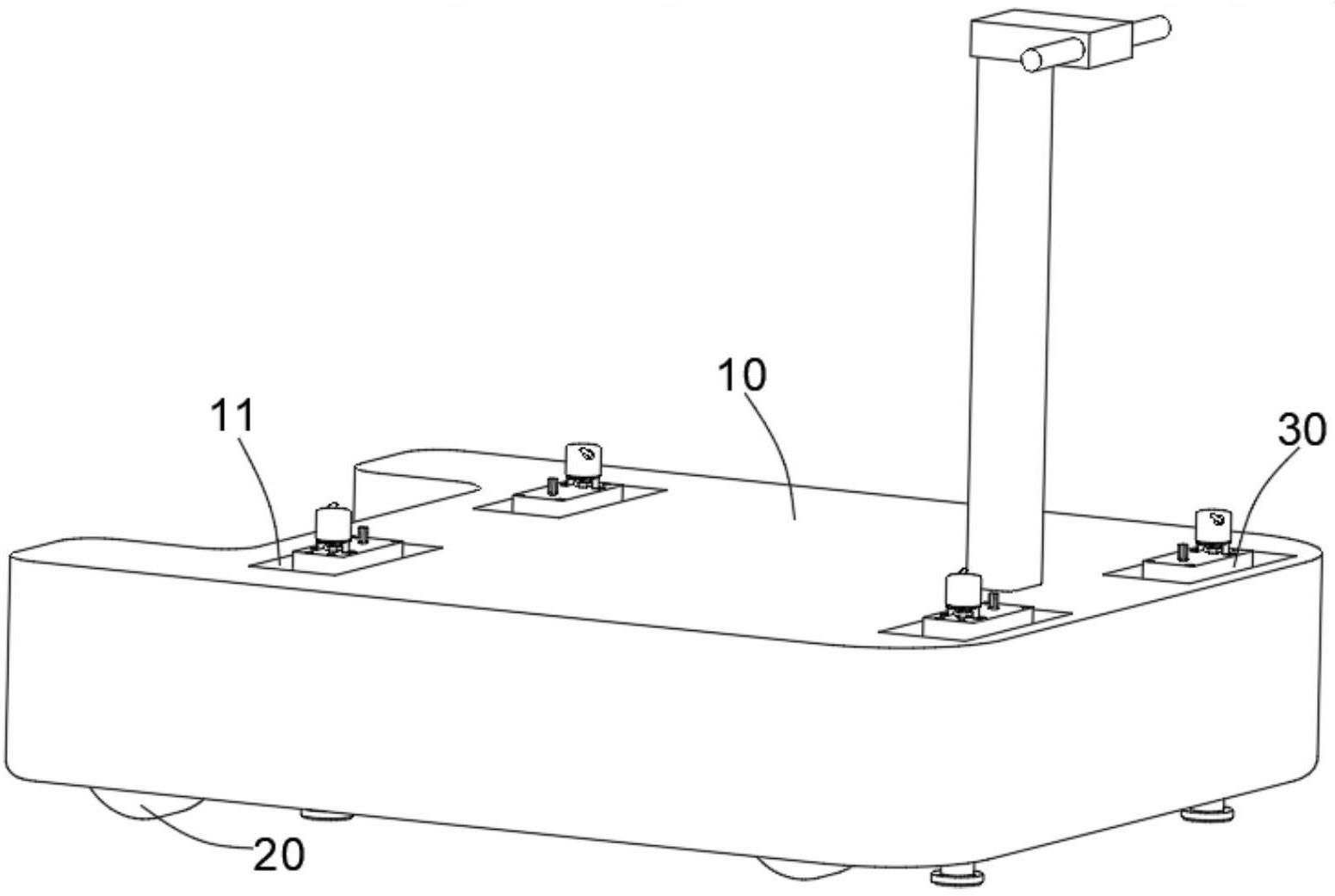
2、本申请实施例提供了一种医疗设备,医疗设备包括底座、脚轮和驻车装置,底座开设有至少一个容纳腔,容纳腔沿底座的高度方向上贯穿底座。脚轮设置于底座,脚轮的最低端超出于底座的底部平面。驻车装置与容纳腔一一对应设置,且至少部分驻车装置位于容纳腔内,驻车装置包括依次连接的驱动部件、传动组件以及伸缩组件,驱动部件通过传动组件驱动伸缩组件运动,伸缩组件包括相连接的输入端和伸缩端,输入端与传动组件连接,输入端以能够沿其自身轴向旋转设置,伸缩端能够将输入端的旋转运动转化为自身沿底座的高度方向上的直线伸缩运动。其中,驻车装置至少包括支撑状态,驻车装置处于支撑状态的情况下,伸缩端的底端与底座的底部平面的距离大于脚轮的最低端与底座的底部平面的距离。
3、在一些实施方式中,驻车装置还包括收缩状态,驻车装置处于收缩状态的情况下,伸缩端的底端与底座的底部平面的距离小于脚轮的最低端与底座的底部平面的距离,且伸缩端的底端不超出底座的底部平面。
4、在一些实施方式中,驱动部件和伸缩组件均位于传动组件的同侧,传动组件的顶部平面不超出底座的顶部平面。
5、在一些实施方式中,伸缩端包括伸缩部和支撑部,沿伸缩组件的长度方向上,支撑部的正投影面积大于伸缩部的正投影面积,和/或,支撑部的底部设有缓冲垫。
6、在一些实施方式中,伸缩组件包括丝杆以及与丝杆相匹配的丝杆螺母,丝杆被配置为输入端,丝杆螺母套设于丝杆,丝杆螺母与伸缩部固定连接,丝杆螺母能够带动伸缩部沿丝杆的长度方向上往复活动。
7、在一些实施方式中,伸缩组件还包括套筒,至少部分丝杆螺母和/或至少部分伸缩部与套筒的内壁面接触,丝杆螺母和/或伸缩部与套筒的内壁面接触的部分沿套筒的长度方向的正投影为非圆形,或者,丝杆螺母和/或伸缩部与套筒的内壁面接触的部分沿套筒的长度方向的正投影为直线与曲线的连续组合。
8、在一些实施方式中,套筒的内壁面沿套筒的长度方向上开设有槽道,伸缩部的外壁面设有与槽道相匹配的凸块,凸块位于槽道内。
9、在一些实施方式中,套筒的内壁面设有第一凸起,丝杆螺母和/或伸缩部的外壁面设有第二凸起,沿套筒的长度方向上,第一凸起位于第二凸起的下方,且第一凸起的正投影与第二凸起的正投影至少部分交叠,第一凸起与第二凸起相配合以限制伸缩部沿自身长度方向上的位移。
10、在一些实施方式中,输入端靠近传动组件的一侧设有传感部件,和/或,驱动部件上设有传感部件。
11、在一些实施方式中,驱动部件包括电机主体和输出轴,输出轴与传动组件的输入端连接,传动组件的输出端与伸缩组件连接。
12、在一些实施方式中,部分输出轴沿其自身长度方向上凸出于传动组件的顶部平面以形成凸出部,凸出部设有扁平结构、内六角结构或者外六角结构中的一者。
13、在一些实施方式中,凸出部凸出于底座的顶部平面。
14、在一些实施方式中,传动组件的传动方式为齿轮传动、链轮链条传动或者蜗轮蜗杆传动中的任意一种。
15、在一些实施方式中,传动组件包括一级输入齿轮、一级输出齿轮、二级输入齿轮和二级输出齿轮,一级输入齿轮与驱动部件的输出轴共轴,一级输出齿轮与一级输入齿轮啮合,二级输入齿轮与一级输出齿轮共轴,二级输出齿轮与二级输入齿轮啮合,输入端与二级输出齿轮共轴。
16、在一些实施方式中,驻车装置的数量为多个,多个驻车装置呈阵列分布于底座,且多个驻车装置中的各驻车装置相互独立调节设置。
17、本申请提供的医疗设备,医疗设备包括底座、脚轮和驻车装置,底座开设有至少一个容纳腔,容纳腔沿底座的高度方向上贯穿底座。脚轮设置于底座,脚轮的最低端超出于底座的底部平面。驻车装置与容纳腔一一对应设置,且至少部分驻车装置位于容纳腔内,驻车装置包括依次连接的驱动部件、传动组件以及伸缩组件,驱动部件通过传动组件驱动伸缩组件运动,伸缩组件包括相连接的输入端和伸缩端,输入端与传动组件连接,输入端以能够沿其自身轴向旋转设置,伸缩端能够将输入端的旋转运动转化为自身沿底座的高度方向上的直线伸缩运动。其中,驻车装置至少包括支撑状态,驻车装置处于支撑状态的情况下,伸缩端的底端与底座的底部平面的距离大于脚轮的最低端与底座的底部平面的距离。
18、在医疗设备移动到预定位置时,驻车装置的伸缩端伸出并抵触地面,驻车装置处于支撑状态下,驻车装置能够将医疗设备顶起并支撑固定,实现医疗设备的驻停;在医疗设备完成工作后需要移动时,驻车装置的伸缩端缩回以离开底面,医疗设备解除驻停。驻车装置具有较高的稳固性,能够有效地提高医疗设备在驻停状态时的稳定性和可靠性。同时,通过将驱动部件、传动组件以及伸缩组件集成设计为一体以构成驻车装置,能够有效提高驻车装置的集成度,有利于减小驻车装置的体积,进而能够减少驻车装置对医疗设备的空间占用。
19、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种医疗设备,其特征在于,包括:
2.根据权利要求1所述的医疗设备,其特征在于,所述驻车装置还包括收缩状态,所述驻车装置处于所述收缩状态的情况下,所述伸缩端的底端与所述底座的底部平面的距离小于所述脚轮的最低端与所述底座的底部平面的距离,且所述伸缩端的底端不超出所述底座的底部平面。
3.根据权利要求1所述的医疗设备,其特征在于,所述驱动部件和所述伸缩组件均位于所述传动组件的同侧,所述传动组件的顶部平面不超出所述底座的顶部平面。
4.根据权利要求1-3任一所述的医疗设备,其特征在于,所述伸缩端包括伸缩部和支撑部,沿所述伸缩组件的长度方向上,所述支撑部的正投影面积大于所述伸缩部的正投影面积,和/或,
5.根据权利要求4所述的医疗设备,其特征在于,所述伸缩组件包括丝杆以及与所述丝杆相匹配的丝杆螺母,所述丝杆被配置为所述输入端,所述丝杆螺母套设于所述丝杆,所述丝杆螺母与所述伸缩部固定连接,所述丝杆螺母能够带动所述伸缩部沿所述丝杆的长度方向上往复活动。
6.根据权利要求5所述的医疗设备,其特征在于,所述伸缩组件还包括套筒,至少部分所述丝杆螺母和/或至少部分所述伸缩部与所述套筒的内壁面接触,所述丝杆螺母和/或所述伸缩部与所述套筒的内壁面接触的部分沿所述套筒的长度方向的正投影为非圆形,或者,
7.根据权利要求6所述的医疗设备,其特征在于,所述套筒的内壁面沿所述套筒的长度方向上开设有槽道,所述伸缩部的外壁面设有与所述槽道相匹配的凸块,所述凸块位于所述槽道内。
8.根据权利要求6所述的医疗设备,其特征在于,所述套筒的内壁面设有第一凸起,所述丝杆螺母和/或所述伸缩部的外壁面设有第二凸起,沿所述套筒的长度方向上,所述第一凸起位于所述第二凸起的下方,且所述第一凸起的正投影与所述第二凸起的正投影至少部分交叠,所述第一凸起与所述第二凸起相配合以限制所述伸缩部沿自身长度方向上的位移。
9.根据权利要求1-3任一所述的医疗设备,其特征在于,所述输入端靠近所述传动组件的一侧设有传感部件,和/或,
10.根据权利要求1-3任一所述的医疗设备,其特征在于,所述驱动部件包括电机主体和输出轴,所述输出轴与所述传动组件的输入端连接,所述传动组件的输出端与所述伸缩组件连接。
11.根据权利要求10所述的医疗设备,其特征在于,部分所述输出轴沿其自身长度方向上凸出于所述传动组件的顶部平面以形成凸出部,所述凸出部设有扁平结构、内六角结构或者外六角结构中的一者。
12.根据权利要求11所述的医疗设备,其特征在于,所述凸出部凸出于所述底座的顶部平面。
13.根据权利要求1-3任一所述的医疗设备,其特征在于,所述传动组件的传动方式为齿轮传动、链轮链条传动或者蜗轮蜗杆传动中的任意一种。
14.根据权利要求1-3任一所述的医疗设备,其特征在于,所述传动组件包括一级输入齿轮、一级输出齿轮、二级输入齿轮和二级输出齿轮,所述一级输入齿轮与所述驱动部件的输出轴共轴,所述一级输出齿轮与所述一级输入齿轮啮合,所述二级输入齿轮与所述一级输出齿轮共轴,所述二级输出齿轮与所述二级输入齿轮啮合,所述输入端与所述二级输出齿轮共轴。
15.根据权利要求1-3任一所述的医疗设备,其特征在于,所述驻车装置的数量为多个,所述多个驻车装置呈阵列分布于所述底座,且所述多个驻车装置中的各所述驻车装置相互独立调节设置。
技术总结
本申请提供了一种医疗设备。医疗设备包括底座、脚轮和驻车装置,底座开设有至少一个容纳腔,容纳腔沿底座的高度方向上贯穿底座。脚轮设置于底座,脚轮的最低端超出于底座的底部平面。驻车装置与容纳腔一一对应设置,且至少部分驻车装置位于容纳腔内,驻车装置包括依次连接的驱动部件、传动组件以及伸缩组件,驱动部件通过传动组件驱动伸缩组件运动,伸缩组件包括相连接的输入端和伸缩端,输入端与传动组件连接,输入端以能够沿其自身轴向旋转设置,伸缩端能够将输入端的旋转运动转化为自身沿底座的高度方向上的直线伸缩运动。根据本申请实施例能够有效地提高医疗设备在驻停状态时的稳定性和可靠性。
技术研发人员:请求不公布姓名
受保护的技术使用者:深圳康诺思腾科技有限公司
技术研发日:20230215
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!