一种长度可调的爬壁机器人的制作方法
本技术涉及爬壁机器人,尤其是指一种长度可调的爬壁机器人。
背景技术:
1、爬壁机器人是可以在壁面上攀爬并完成作业的自动化机器人,又称为壁面移动机器人,爬壁机器人具备吸附和移动两个基本功能,通过吸附方式使得机器人吸附于壁面上,保证其在壁面上稳定运行。现有的爬壁机器人可用于罐体探伤检查或喷漆处理、建筑物的清洁和喷涂、核工业产品的检查测厚以及消防和造船等行业,应用广泛,可代替人工进行一些高危或恶劣环境的作业,降低作业安全性。
2、现有的爬壁机器人可以在平整的壁面上进行较好的移动,但是对于崎岖不平的壁面却无法保证稳定运行,无法满足使用需求。
技术实现思路
1、为此,本实用新型所要解决的技术问题在于克服现有技术中爬壁机器人在崎岖不平的壁面上无法保证稳定运行的缺陷。
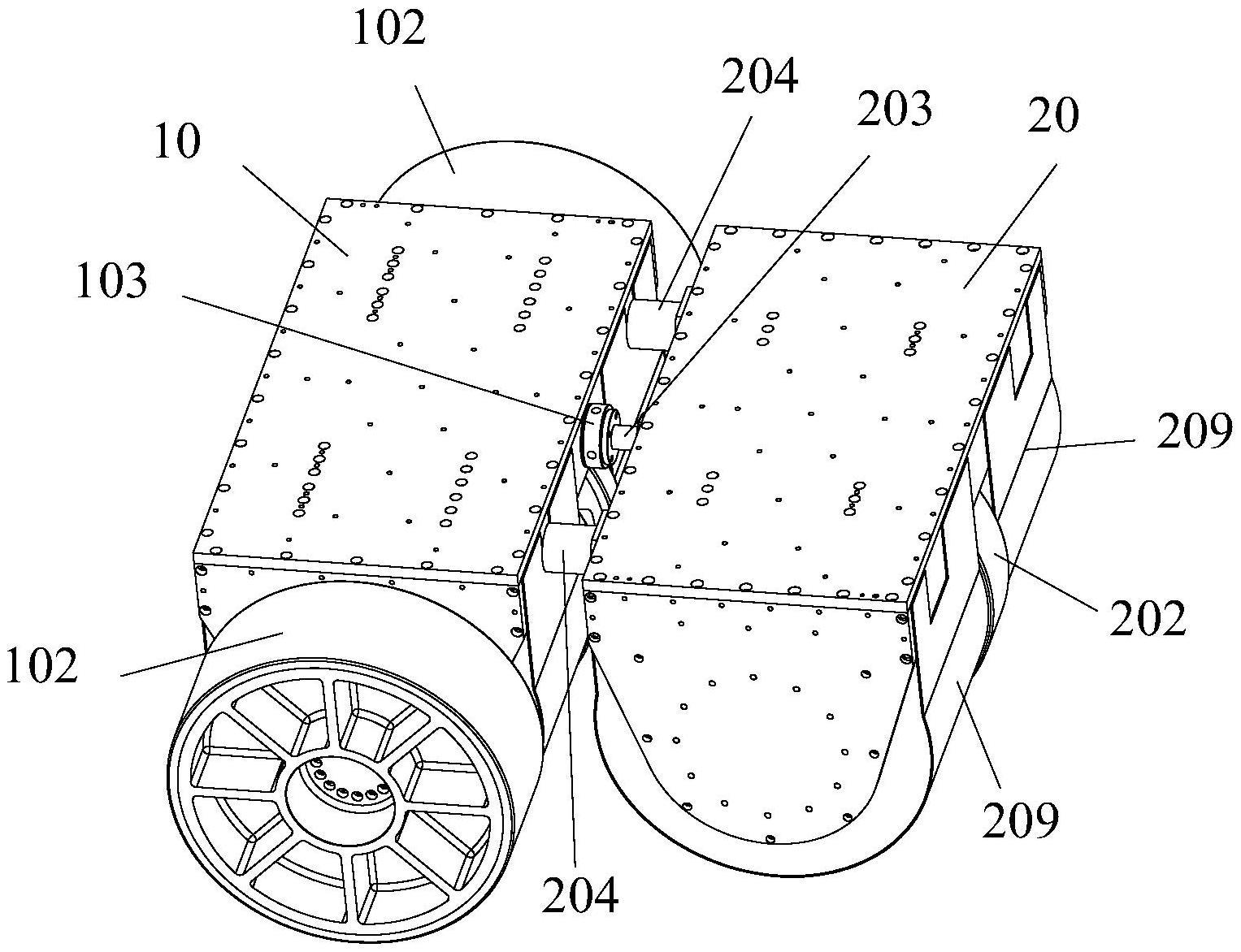
2、为解决上述技术问题,本实用新型提供了一种长度可调的爬壁机器人,包括,
3、行走模组,所述行走模组包括第一架体,所述第一架体的两侧可转动地连接有驱动轮;
4、支撑模组,所述支撑模组包括第二架体,所述第二架体上可转动的连接有辅助轮;
5、所述第一架体和第二架体之间通过调节螺杆相连接,所述调节螺杆的一端固定在所述第二架体上,所述调节螺杆的另一端旋合有调节螺母,所述调节螺母可转动的连接在所述第一架体上。
6、在本实用新型的一个实施例中,所述调节螺母包括转动本体,所述转动本体上设置有螺纹孔,所述调节螺杆与所述螺纹孔相旋合,所述第一架体上设置有通孔,所述转动本体的外壁可转动地连接在所述通孔中,所述转动本体的外壁上还设置有环体,所述环体的外径大于所述通孔的直径。
7、在本实用新型的一个实施例中,所述第一架体上还连接有导向杆,所述第二架体上连接有导向件,所述导向杆可滑移地连接在所述导向件中,所述导向杆和所述调节螺杆的轴线相平行。
8、在本实用新型的一个实施例中,所述调节螺杆的两侧均设置有所述导向杆。
9、在本实用新型的一个实施例中,所述调节螺杆两侧的所述导向杆呈对称设置。
10、在本实用新型的一个实施例中,所述支撑模组还包括中心轴,所述中心轴连接在所述第二架体上,所述辅助轮可转动地连接在所述中心轴的外壁上。
11、在本实用新型的一个实施例中,所述中心轴的外壁上还可转动地连接有调节套筒,所述调节套筒上连接有磁铁件,所述调节套筒上还设置有蜗轮部,所述蜗轮部与蜗杆相啮合,所述蜗杆由驱动装置驱动旋转,所述驱动装置和所述第二架体相连接。
12、在本实用新型的一个实施例中,所述调节套筒通过压力传感器和所述磁铁件相连接。
13、在本实用新型的一个实施例中,所述辅助轮的两侧均设置有所述调节套筒。
14、在本实用新型的一个实施例中,每个所述驱动轮均由独立的电机驱动旋转。
15、本实用新型的上述技术方案相比现有技术具有以下优点:
16、本实用新型所述的长度可调的爬壁机器人,有效保证了机器人在不同壁面的爬行稳定性,对于平整壁面和崎岖不平的壁面均具有较好的运行可靠性。
技术特征:
1.一种长度可调的爬壁机器人,其特征在于:包括,
2.根据权利要求1所述的长度可调的爬壁机器人,其特征在于:所述调节螺母包括转动本体,所述转动本体上设置有螺纹孔,所述调节螺杆与所述螺纹孔相旋合,所述第一架体上设置有通孔,所述转动本体的外壁可转动地连接在所述通孔中,所述转动本体的外壁上还设置有环体,所述环体的外径大于所述通孔的直径。
3.根据权利要求1所述的长度可调的爬壁机器人,其特征在于:所述第一架体上还连接有导向杆,所述第二架体上连接有导向件,所述导向杆可滑移地连接在所述导向件中,所述导向杆和所述调节螺杆的轴线相平行。
4.根据权利要求3所述的长度可调的爬壁机器人,其特征在于:所述调节螺杆的两侧均设置有所述导向杆。
5.根据权利要求4所述的长度可调的爬壁机器人,其特征在于:所述调节螺杆两侧的所述导向杆呈对称设置。
6.根据权利要求1所述的长度可调的爬壁机器人,其特征在于:所述支撑模组还包括中心轴,所述中心轴连接在所述第二架体上,所述辅助轮可转动地连接在所述中心轴的外壁上。
7.根据权利要求6所述的长度可调的爬壁机器人,其特征在于:所述中心轴的外壁上还可转动地连接有调节套筒,所述调节套筒上连接有磁铁件,所述调节套筒上还设置有蜗轮部,所述蜗轮部与蜗杆相啮合,所述蜗杆由驱动装置驱动旋转,所述驱动装置和所述第二架体相连接。
8.根据权利要求7所述的长度可调的爬壁机器人,其特征在于:所述调节套筒通过压力传感器和所述磁铁件相连接。
9.根据权利要求7所述的长度可调的爬壁机器人,其特征在于:所述辅助轮的两侧均设置有所述调节套筒。
10.根据权利要求1所述的长度可调的爬壁机器人,其特征在于:每个所述驱动轮均由独立的电机驱动旋转。
技术总结
本技术涉及一种长度可调的爬壁机器人,包括行走模组和支撑模组,行走模组包括第一架体,第一架体的两侧可转动地连接有驱动轮;支撑模组包括第二架体,第二架体上可转动的连接有辅助轮;第一架体和第二架体之间通过调节螺杆相连接,调节螺杆的一端固定在第二架体上,调节螺杆的另一端旋合有调节螺母,调节螺母可转动的连接在第一架体上。本技术有效保证了机器人在不同壁面的爬行稳定性,对于平整壁面和崎岖不平的壁面均具有较好的运行可靠性。
技术研发人员:章军福,王宝玉,李建伟
受保护的技术使用者:江苏镌极特种设备有限公司
技术研发日:20230324
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!