一种用于人工智能机器人的行走机构的制作方法
本技术涉及机器人,尤其涉及一种用于人工智能机器人的行走机构。
背景技术:
1、近年来,随着人工智能机器人的不断快速发展,人工智能机器人的应用也越来越广泛,越来越多的行业开始使用人工智能机器人,例如:农业生产机器人、酒店服务机器人和家庭智能陪护机器人等,其中农业机器人是机器人在农业生产中的运用,是一种可由不同程序软件控制,以适应各种作业,能感觉并适应作物种类或环境变化,有检测(如视觉等)和演算等,人工智能的新一代无人自动操作机械,这些农业人工智能机器人能极大的提高我们的生产效率,但这些农业人工智能机器人在土地上行走时,因周围各种环境问题,行走方面还不是很便捷,而人工智能机器人的行走机构能够辅助机器人自由移动,可尽量避开障碍物,并且人工智能机器人行走保持平稳性。
2、目前应用在农业生产方面的人工智能机器人的行走机构在脱困能力方面有着明显的不足,人工智能机器人在种植园内工作时,由于种植园内土地土壤经常翻新变动,地面会出现凹凸不平的情况,尤其是在下雨过后,地面变得泥泞,更容易打滑,在这种情况下,人工智能机器人车轮陷入坑洼时经常容易打滑,极大的限制了机器人的行动能力,尤其是当车轮陷入沙地或者泥地的时候,人工智能机器人很难自行脱困,因此需要设计一种能自行脱困的人工智能机器人的行走机构。
技术实现思路
1、本部分的目的在于概述本实用新型的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、鉴于上述现有一种用于人工智能机器人的行走机构存在的问题,提出了本实用新型。
3、因此,本实用新型目的是提供一种用于人工智能机器人的行走机构,其适用于解决在种植园内地面凹凸不平的情况下,人工智能机器人车轮陷入坑洼时经常容易卡住和打滑,极大的限制了机器人的行动能力,尤其是当车轮陷入沙地或者泥地的时候,人工智能机器人很难自行脱困的问题。
4、为解决上述技术问题,本实用新型提供如下技术方案:一种用于人工智能机器人的行走机构,其包括:
5、主体单元,其包括底座和固定安装在底座上侧面边缘的多组限位板,所述底座下侧面一端固定安装有两个位置对称的固定耳;
6、脱困单元,其包括固定安装在底座下侧面上的第一驱动电机和第二驱动电机以及第三驱动电机,所述第二驱动电机和第三驱动电机远离固定耳对称安装,所述第一驱动电机输出轴上固定安装有第一齿轮,两个所述固定耳之间共同转动连接有传动杆,且传动杆两端向外贯穿固定耳固定连接有三角连接板,所述传动杆上固定安装有与第一齿轮相互啮合的第二齿轮,所述三角连接板边缘处转动有多组均匀分布的从动轮;
7、驱动单元,其包括分别固定安装在第二驱动电机和第三驱动电机输出轴上的驱动轮,且驱动轮设置成中空结构,每个所述驱动轮远离第二驱动电机输出轴的一侧壁贯穿设置有减速电机,所述减速电机输出轴上固定安装有连接柱,所述连接柱侧壁上转动连接有多组l型板,所述l型板两侧壁分别开设有滑槽,所述驱动轮轮面上还均匀开设有多组扇形开口,所述扇形开口固定设置有与滑槽匹配的滑柱,所述驱动轮内侧壁固定安装有多组限位柱,且限位柱设置在相邻两个l型板之间。
8、作为本实用新型所述一种用于人工智能机器人的行走机构的一种优选方案,其中:所述第一驱动电机和第二驱动电机以及第三驱动电机上均固定套设有多组固定块,每个所述固定块与底座均通过螺栓螺纹连接。
9、作为本实用新型所述一种用于人工智能机器人的行走机构的一种优选方案,其中:所述驱动轮上贴合安装有防滑橡胶,且l型板远离连接柱的一端面上也安装有防滑橡胶。
10、作为本实用新型所述一种用于人工智能机器人的行走机构的一种优选方案,其中:每个所述l型板与连接柱均通过对应的转杆转动连接,且连接柱上固定套设有两个限位圈,两个所述限位圈对称设置在多组l型板两侧。
11、作为本实用新型所述一种用于人工智能机器人的行走机构的一种优选方案,其中:所述底座下侧面设置有两个防护罩,其中一个所述防护罩罩住第一驱动电机和传动杆,另一个防护罩罩住第二驱动电机和第三驱动电机,且每个防护罩与底座下侧壁通过螺栓螺纹连接。
12、作为本实用新型所述一种用于人工智能机器人的行走机构的一种优选方案,其中:所述三角连接板中心处距地高度与驱动轮半径一致,且从动轮(208)上设置有防滑纹理。
13、本实用新型的有益效果:通过第一驱动电机带动三角连接板持续旋转,旋转的三角连接板带动从动轮跨过土坑或者土坡,而驱动轮上的减速电机使l型板从驱动轮中伸出,增大驱动轮的直径的同时,伸出的l型板增加驱动轮在泥沙地面上的抓地力,使驱动轮更容易的在沙地或泥地上脱困,直到路面平整无障碍物之后,会停止第一驱动电机和收回l型板到驱动轮内,有效解决了人工智能机器人行走机构在种植园坑洼或者泥泞处行走时,车轮容易打滑进而不能自主脱困的问题。
14、附图说明
15、为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。其中:
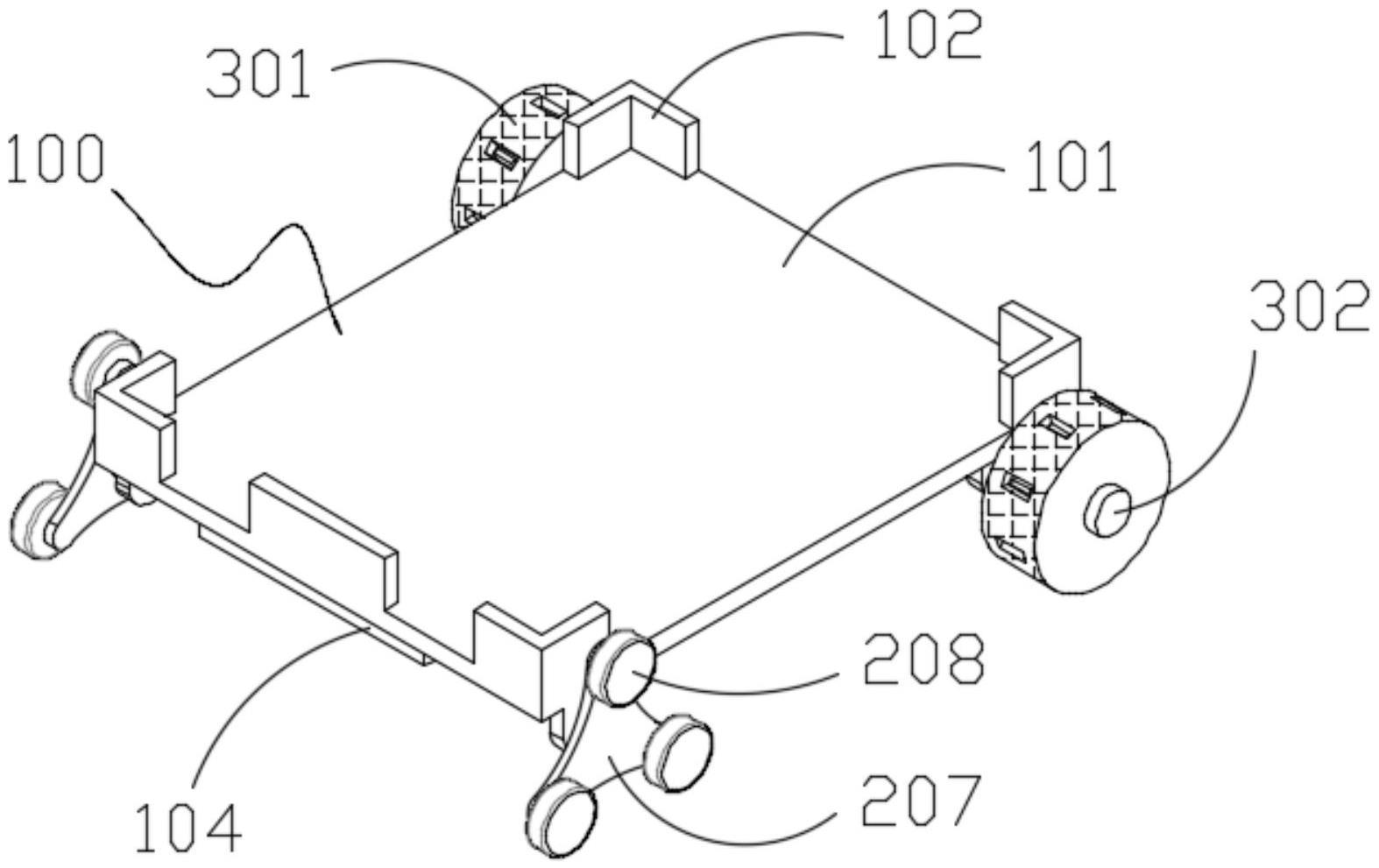
16、图1为本实用新型提出的一种用于人工智能机器人的行走机构的整体结构示意图;
17、图2为本实用新型提出的一种用于人工智能机器人的行走机构的脱困单元底部结构示意图;
18、图3为本实用新型提出的一种用于人工智能机器人的行走机构的驱动单元结构示意图;
19、图4为本实用新型提出的一种用于人工智能机器人的行走机构的驱动单元拆解结构示意图。
技术特征:
1.一种用于人工智能机器人的行走机构,其特征在于,包括:
2.根据权利要求1所述的一种用于人工智能机器人的行走机构,其特征在于:每个所述l型板(305)与连接柱(303)均通过对应的转杆转动连接,且连接柱(303)上固定套设有两个限位圈(304),两个所述限位圈(304)对称设置在多组l型板(305)两侧。
3.根据权利要求1所述的一种用于人工智能机器人的行走机构,其特征在于:所述第一驱动电机(201)和第二驱动电机(202)以及第三驱动电机(203)上均固定套设有多组固定块(105),每个所述固定块(105)与底座(101)均通过螺栓螺纹连接。
4.根据权利要求1所述的一种用于人工智能机器人的行走机构,其特征在于:所述驱动轮(301)上贴合安装有防滑橡胶,且l型板(305)远离连接柱(303)的一端面上也安装有防滑橡胶。
5.根据权利要求1所述的一种用于人工智能机器人的行走机构,其特征在于:所述底座(101)下侧面设置有两个防护罩(104),其中一个所述防护罩(104)罩住第一驱动电机(201)和传动杆(206),另一个防护罩(104)罩住第二驱动电机(202)和第三驱动电机(203),且每个防护罩(104)与底座(101)下侧壁通过螺栓螺纹连接。
6.根据权利要求1所述的一种用于人工智能机器人的行走机构,其特征在于:所述三角连接板(207)中心处距地高度与驱动轮(301)半径一致,且从动轮(208)上设置有防滑纹理。
技术总结
本技术公开了一种用于人工智能机器人的行走机构,包括:主体单元,其包括底座和固定安装在底座上侧面边缘的多组限位板,所述底座下侧面一端固定安装有两个位置对称的固定耳;脱困单元,其包括固定安装在底座下侧面上的第一驱动电机和第二驱动电机以及第三驱动电机,所述第一驱动电机输出轴上固定安装有第一齿轮,两个所述固定耳之间共同转动连接有传动杆,且传动杆两端向外贯穿固定耳固定连接有三角连接板。本技术通过旋转的三角连接板带动从动轮跨过土坑或者土坡,而驱动轮上的减速电机使L型板从驱动轮中伸出,伸出的L型板增加驱动轮在泥沙地面上的抓地力,使驱动轮更容易的在沙地或泥地上脱困。
技术研发人员:刘永鹏,孙小峰
受保护的技术使用者:江苏葆隆智能科技有限公司
技术研发日:20230420
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!