一种切比雪夫仿生步行机构
本技术涉及步行机构,具体为一种切比雪夫仿生步行机构。
背景技术:
1、行走式机器人具有广阔的应用前景,如工业制造、医疗保健、教育娱乐等。随着人们对行走机械领域的研究不断深入,传统的轮式、履带式的行走机器人已日渐成熟,大大提高了人们的出行效率。然而传统行走机器人存在的弊端也日渐凸显,轮式机器人虽行走速度快,但跨越障碍能力差,履带式机器人承运载能力强,但其庞大笨重、行走缓慢。足式机器人因其具有丰富的步态,只需要离散的点接触地面,对障碍、沟渠等复杂特殊地形的适应能力更强,逐渐成为新的研究热点。
2、目前已有的足式机器人仍旧存在部分问题:为了提高机体的稳定性与承载能力,会增加腿的数量,但驱动腿关节所用的驱动器的数量就会越多,各腿之间的协调就更加困难,控制系统也较为复杂。传统的六足机器人需要18个舵机(每条腿3个舵机)甚至更多或者其他多动力装置如差速器、液压等才能实现转向、直线行走功能,如哈尔滨工业大学于楠提出的一种独轮式球形六足机器人、专利cn207860317u、挪威工程师zenta设计的morphex系列机器人,结构和控制方式较为复杂。为了简化控制,通过巧妙的机械结构设计,同样可以实现仿生步行。传统的切比雪夫(chebyshev)仿生步行机构利用的曲柄摇杆机构的特殊属性,使得足端运行轨迹具有支撑、抬腿和放腿的动作过程,但由于缺少腰部关节,只能实现直线行走,不具备转向能力,大大削弱了其应用价值。广西机电职业技术学院的崔明军提出了使用两侧差速的方式转向,但势必造成行走不稳定、转弯半径过大的缺陷。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本实用新型目的是提供一种能够实现灵活转向和稳定跨步行走、结构和控制方式简单、自适应地势变化、具有减震性能的切比雪夫仿生步行机构。
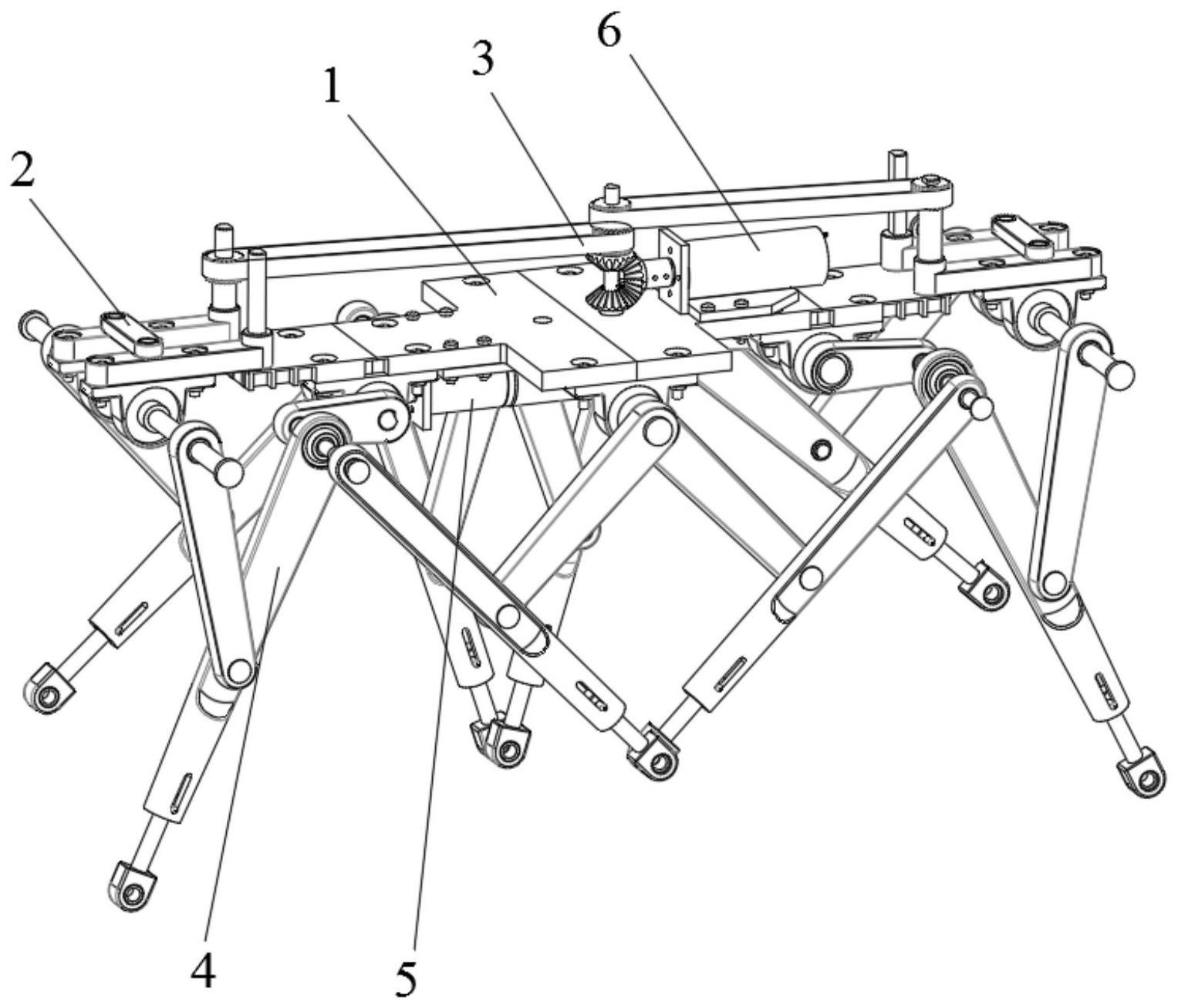
2、技术方案:本实用新型所述的一种切比雪夫仿生步行机构,包括机架,机架上设置转向摇臂机构、转向传动机构、行走机构、行走电机和转向电机;转向传动机构与转向电机相连,行走机构与行走电机相连,行走电机驱动行走机构实现稳定跨步行走,通过转向电机、转向传动机构、转向摇臂机构以及行走机构实现转向;转向传动机构包括前同步带轮、后同步带轮、转向齿轮总成、同步带和定位套筒,前同步带轮、后同步带轮分别通过定位套筒安装在转向摇臂机构上;转向电机的输出端与锥齿轮一相连,锥齿轮一与转向齿轮总成相啮合。
3、进一步地,转向齿轮总成包括锥齿轮轴、齿轮带轮、同步带轮,锥齿轮轴上设置与齿轮带轮间隙配合的凹槽,锥齿轮轴与同步带轮紧密配合;前同步带轮与齿轮带轮通过同步带相连,后同步带轮与同步带轮通过同步带相连。锥齿轮一的上下分别与齿轮带轮、锥齿轮轴啮合。
4、进一步地,转向电机通过支架固定在机架上。
5、进一步地,行走机构包括前摇杆、前转向支撑腿、后摇杆、主动曲柄、旋转轴、前弹性支撑腿、中前摇杆、中后摇杆、从动曲柄、后弹性支撑腿和后转向支撑腿;主动曲柄与机架、从动曲柄与机架之间均通过旋转轴相连;主动曲柄的自由端通过球关节一连接前转向支撑腿,并与前弹性支撑腿铰接;从动曲柄的自由端通过球关节二连接后转向支撑腿,并与后弹性支撑腿铰接;前弹性支撑腿、后弹性支撑腿的末端铰接;中前摇杆的一端与前弹性支撑腿铰接,另一端通过销钉二与机架相连;中后摇杆的一端与后弹性支撑腿铰接,另一端也通过销钉二与机架相连;前转向支撑腿通过前摇杆与机架上的转向摇臂铰接;后转向支撑腿通过后摇杆与转向摇臂铰接。
6、进一步地,前弹性支撑腿与后弹性支撑腿结构完全相同。前弹性支撑腿包括弹性支撑腿末端、限位销、导向槽、弹性支撑腿套筒,弹性支撑腿套筒上设置用于限位销滑动的导向槽,限位销设置在弹性支撑腿末端上,导向槽内、弹性支撑腿末端的顶部设置缓冲弹簧。前弹性支撑腿还包括石墨套筒,石墨套筒设置在弹性支撑腿套筒、弹性支撑腿末端上。
7、进一步地,前转向支撑腿、后转向支撑腿上设置用于形成球面副的球关节安装孔,前弹性支撑腿的顶部有销钉安装孔,用于形成圆柱副,其他结构与前转向支撑腿或后转向支撑腿均相同。
8、进一步地,机架上设置用于支撑销钉一的轴承座,前摇杆能够相对于销钉一转动且沿着销钉一轴向运动。
9、工作原理:机架上下分别安装转向电机和行走电机,分别驱动转向系统和跨步行走系统。当需要跨步行走时,驱动行走电机,通过锥齿轮二传动带动旋转轴以及位于车架左右两侧的主动曲柄整周旋转,从动曲柄也随之整周旋转,而前、后转向支撑腿以及弹性支撑腿来回摆动。根据切比雪夫四杆机构的运行原理可知,每个弹性支撑腿末端的运动轨迹类似一个扇形,使得足端运行轨迹具有支撑、抬腿和放腿的动作过程。当主动曲柄与机架平齐时,前、后转向支撑腿末端均位于最低位置落地,前、后弹性支撑腿形成的中间支撑腿的末端位于最高位置悬空。车身右侧十杆机构的运动状态与左侧相反,前、后转向支撑腿末端位于最高位置悬空,中间弹性支撑腿位于最低位置落地,进而左右两侧实现三点落地支撑,三点悬空摆动。随着行走电机的转动,彼此交替地摆动和支撑,可实现机器人的稳定跨步行进。
10、当需要转向时,转向电机通过锥齿轮一传动带动锥齿轮轴和齿轮带轮转动,两者转动方向相反,同步带轮转向与锥齿轮轴相同,与齿轮带轮相反,通过同步带传动前后转向摇臂之间转向相反。因基于切比雪夫四杆的行走机构中存在两个球关节,以上的相反转向运动可传递给前、后转向支撑腿,从而实现某个方向的转向运动。当转向电机反向转动时即可实现另一个方向的转向运动。
11、有益效果:本实用新型和现有技术相比,具有如下特点:
12、1、采用两个电机即可实现可转向和直线行走功能,结构与控制方式均较简单;
13、2、采用弹性支撑腿,在行进的过程中可根据地势变化自由的调整各个支撑腿的伸出长度,随时进行自身姿态的调整以保持机身稳定,也具有一定的弹性和减振性能;
14、3、行走系统采用chebyshev十杆机构,时刻保持三点支撑,增强机器人的跨步行进的稳定性。
技术特征:
1.一种切比雪夫仿生步行机构,其特征在于:包括机架(1),所述机架(1)上设置转向摇臂机构(2)、转向传动机构(3)、行走机构(4)、行走电机(5)和转向电机(6);所述转向传动机构(3)与转向电机(6)相连,所述行走机构(4)与行走电机(5)相连,行走电机(5)驱动行走机构(4)实现稳定跨步行走,通过转向电机(6)、转向传动机构(3)、转向摇臂机构(2)以及行走机构(4)实现转向;所述转向传动机构(3)包括前同步带轮(31)、后同步带轮(32)、转向齿轮总成(33)、同步带(34)和定位套筒(35),所述前同步带轮(31)、后同步带轮(32)分别通过定位套筒(35)安装在转向摇臂机构(2)上;所述转向电机(6)的输出端与锥齿轮一(7)相连,所述锥齿轮一(7)与转向齿轮总成(33)相啮合。
2.根据权利要求1所述的一种切比雪夫仿生步行机构,其特征在于:所述转向齿轮总成(33)包括锥齿轮轴(331)、齿轮带轮(332)、同步带轮(333),所述锥齿轮轴(331)上设置与齿轮带轮(332)间隙配合的凹槽,所述锥齿轮轴(331)与同步带轮(333)紧密配合;所述前同步带轮(31)与齿轮带轮(332)通过同步带(34)相连,所述后同步带轮(32)与同步带轮(333)通过同步带相连。
3.根据权利要求2所述的一种切比雪夫仿生步行机构,其特征在于:所述锥齿轮一(7)的上下分别与齿轮带轮(332)、锥齿轮轴(331)啮合。
4.根据权利要求1所述的一种切比雪夫仿生步行机构,其特征在于:所述转向电机(6)通过转向电机支架(8)固定在机架(1)上。
5.根据权利要求1所述的一种切比雪夫仿生步行机构,其特征在于:所述行走机构(4)包括前摇杆(401)、前转向支撑腿(402)、后摇杆(403)、主动曲柄(404)、旋转轴(405)、前弹性支撑腿(406)、中前摇杆(407)、中后摇杆(408)、从动曲柄(409)、后弹性支撑腿(410)和后转向支撑腿(411);所述主动曲柄(404)与机架(1)、从动曲柄(409)与机架(1)之间均通过旋转轴(405)相连;所述主动曲柄(404)的自由端通过球关节一(9)连接前转向支撑腿(402),并与前弹性支撑腿(406)铰接;所述从动曲柄(409)的自由端通过球关节二(10)连接后转向支撑腿(411),并与后弹性支撑腿(410)铰接;所述前弹性支撑腿(406)、后弹性支撑腿(410)的末端铰接;所述中前摇杆(407)的一端与前弹性支撑腿(406)铰接,另一端通过销钉二(11)与机架(1)相连;所述中后摇杆(408)的一端与后弹性支撑腿(410)铰接,另一端也通过销钉二(11)与机架(1)相连;所述前转向支撑腿(402)通过前摇杆(401)与机架(1)上的转向摇臂(12)铰接;所述后转向支撑腿(411)通过后摇杆(403)与转向摇臂(12)铰接。
6.根据权利要求5所述的一种切比雪夫仿生步行机构,其特征在于:所述前弹性支撑腿(406)与后弹性支撑腿(410)结构完全相同。
7.根据权利要求6所述的一种切比雪夫仿生步行机构,其特征在于:所述前弹性支撑腿(406)包括弹性支撑腿末端(4061)、限位销(4062)、导向槽(4063)、弹性支撑腿套筒(4064),所述弹性支撑腿套筒(4064)上设置用于限位销(4062)滑动的导向槽(4063),所述限位销(4062)设置在弹性支撑腿末端(4061)上,所述导向槽(4063)内、弹性支撑腿末端(4061)的顶部设置缓冲弹簧。
8.根据权利要求7所述的一种切比雪夫仿生步行机构,其特征在于:所述前弹性支撑腿(406)还包括石墨套筒(4065),所述石墨套筒(4065)设置在弹性支撑腿套筒(4064)、弹性支撑腿末端(4061)上。
9.根据权利要求7所述的一种切比雪夫仿生步行机构,其特征在于:所述前转向支撑腿(402)、后转向支撑腿(411)上设置用于形成球面副的球关节安装孔(16)。
10.根据权利要求5所述的一种切比雪夫仿生步行机构,其特征在于:所述机架(1)上设置用于支撑销钉一(13)的轴承座(102),所述前摇杆(401)能够相对于销钉一(13)转动且沿着销钉一(13)轴向运动。
技术总结
本技术公开了一种切比雪夫仿生步行机构,包括机架,机架上设置转向摇臂机构、转向传动机构、行走机构、行走电机和转向电机;转向传动机构与转向电机相连,行走机构与行走电机相连,行走电机驱动行走机构实现稳定跨步行走,通过转向电机、转向传动机构、转向摇臂机构以及行走机构实现转向;转向传动机构包括前同步带轮、后同步带轮、转向齿轮总成、同步带和定位套筒,前同步带轮、后同步带轮分别通过定位套筒安装在转向摇臂机构上;转向电机输出端与锥齿轮一相连,锥齿轮一与转向齿轮总成相啮合。本技术采用两个电机即可实现可转向和直线行走功能,结构与控制方式简单,能随时进行姿态调整以保持机身稳定,具有一定的弹性和减振性能。
技术研发人员:楼飞,高燕妮,薛雪,宋志方,羊雨婷
受保护的技术使用者:南京师范大学中北学院
技术研发日:20230516
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!