一种工业机器人转运装置的制作方法
本技术涉及工业机器人转运设备,具体为一种工业机器人转运装置。
背景技术:
1、工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动,工业机器人在构建过程中会涉及到将其进行转运,申请号cn202222709575.3公布了一种工业机器人转运装置,该装置通过运转箱、门板、夹板和限位杆配合使用,使得工作人员在转运工业机器人时,可以将机器人放置在运转箱内,夹板对工业机器人的左右两侧进行限位固定,限位杆对工业机器人的前后两侧进行限位固定,运转箱和门板对工业机器人的外部进行防护,从而使得工业机器人可以固定在运转箱内部,进一步降低了工业机器人在转运过程中磕碰运转箱内壁的概率,提高了工业机器人转运的安全性,方便了工作人员对工业机器人的转运工作;但是现有的工业机器人转运设备移动起来需要工作人员手动来推动,才能够使其进行位移,而一些工业机器人的体型较大且较为笨重,导致转运装置移动起较慢,且效率较低,影响使用。
2、因此,我们提出了一种工业机器人转运装置。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种工业机器人转运装置,解决了现有的工业机器人转运设备移动起来需要工作人员手动来推动,才能够使其进行位移,而一些工业机器人的体型较大且较为笨重,导致转运装置移动起较慢,且效率较低,影响使用。
3、(二)技术方案
4、为实现以上目的,本实用新型通过以下技术方案予以实现:一种工业机器人转运装置,包括车体,所述车体底端表面通过螺栓装配有可用于辅助支撑的轴承座,且轴承座有多组,两组所述轴承座之间转动安装有可用于传动的转轴,且转轴位于车体外侧的两端均法兰安装有可用于移动的车轮,所述转轴外周套设安装有可用于传动的蜗轮,且车体底端表面转动安装有与车轮相啮合连接的蜗杆,所述蜗杆远离蜗轮的一端装配有位于车体底端表面的减速器,且减速器动力输入端通过螺栓装配有可用于提供动力的驱动电机。
5、优选的,所述车体外周一侧壁表面装配有可用于防护的盒体,目盒体内侧装配有可用于提供电源的蓄电池组;
6、优选的,所述车体底端表面通过螺栓装配有可用于防护的机壳;
7、优选的,所述盒体顶端表面通过合页铰接有可用于防护的盒盖,且盒盖与盒体之间装配有可用于固定的锁扣;
8、优选的,所述盒体远离车体的一面通过螺栓装配有可用于辅助移动的把手;
9、优选的,所述把手顶端表面通过螺栓装配有可用于操控的控制器。
10、(三)有益效果
11、本实用新型提供了一种工业机器人转运装置。具备以下有益效果:
12、该一种工业机器人转运装置,在需要对工业机器人进行转运时,按照相应的安装需求把工业机器人安置在车体顶部的箱体中,便于对其进行限位,随后工作人员可以使得车体底部的驱动电机通电运作,随后驱动电机能够在减速器的运作下转化扭矩,并使得车体底端表面的蜗杆能够旋转,随后蜗杆方便与蜗轮相互啮合并带动蜗轮旋转,随后蜗轮从而带动转轴进行旋转,而转轴位于车体外侧两端的车轮随之转动,使得车体能够位移并方便带动放置在车体顶部箱体中的工业机器人能够移动,方便对其进行转运,并方便移动到合适的位置处,全程采用自动化的操作方式,便于节省人工来推动车体对工业机器人进行转运时所消耗的人力,效率较高且颇为方便,便于根据使用时的需求进行转运。
技术特征:
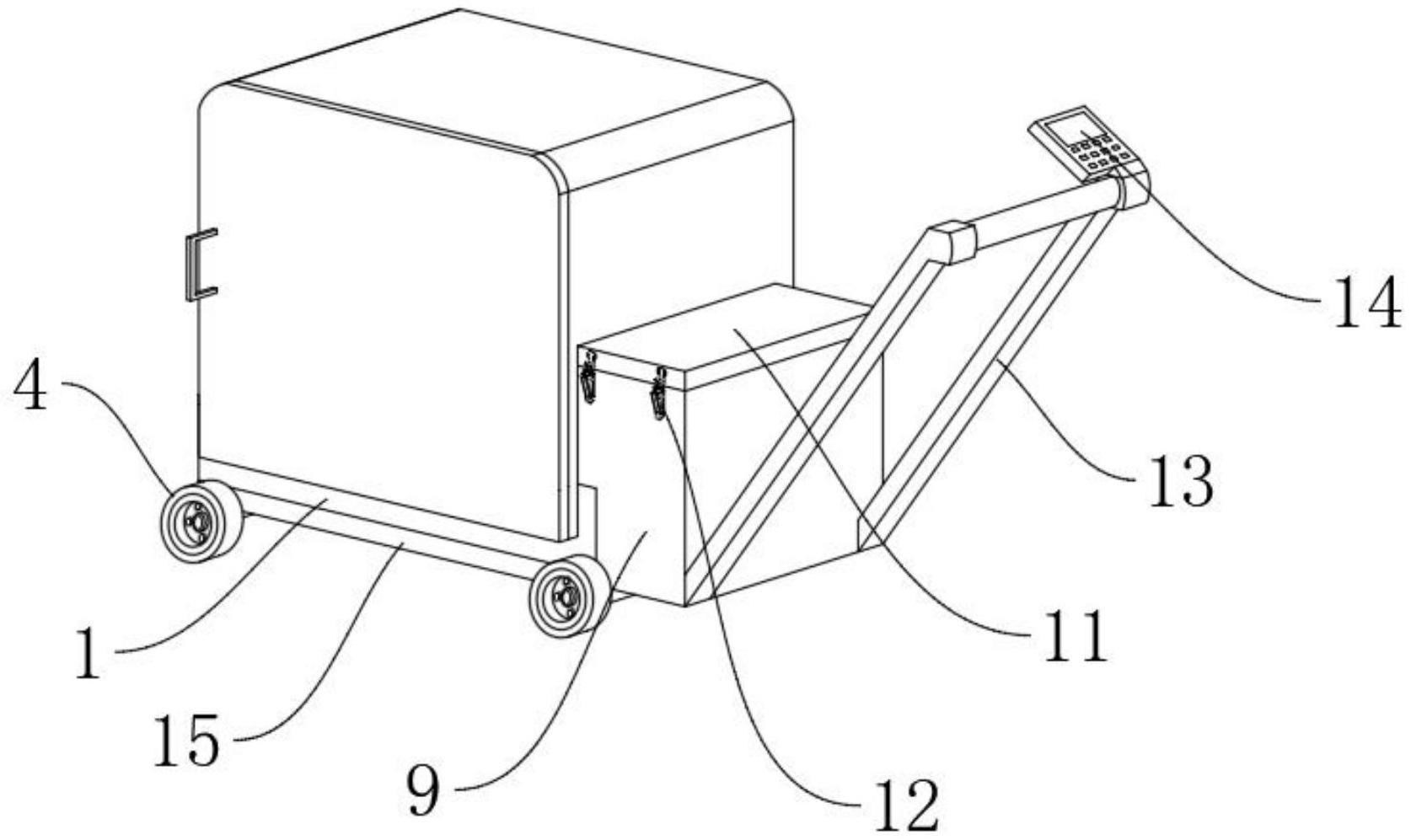
1.一种工业机器人转运装置,其特征在于:包括车体(1),所述车体(1)底端表面通过螺栓装配有可用于辅助支撑的轴承座(2),且轴承座(2)有多组,两组所述轴承座(2)之间转动安装有可用于传动的转轴(3),且转轴(3)位于车体(1)外侧的两端均法兰安装有可用于移动的车轮(4),所述转轴(3)外周套设安装有可用于传动的蜗轮(5),且车体(1)底端表面转动安装有与车轮(4)相啮合连接的蜗杆(6),所述蜗杆(6)远离蜗轮(5)的一端装配有位于车体(1)底端表面的减速器(7),且减速器(7)动力输入端通过螺栓装配有可用于提供动力的驱动电机(8)。
2.根据权利要求1所述的一种工业机器人转运装置,其特征在于:所述车体(1)外周一侧壁表面装配有可用于防护的盒体(9),目盒体(9)内侧装配有可用于提供电源的蓄电池组(10)。
3.根据权利要求1所述的一种工业机器人转运装置,其特征在于:所述车体(1)底端表面通过螺栓装配有可用于防护的机壳(15)。
4.根据权利要求2所述的一种工业机器人转运装置,其特征在于:所述盒体(9)顶端表面通过合页铰接有可用于防护的盒盖(11),且盒盖(11)与盒体(9)之间装配有可用于固定的锁扣(12)。
5.根据权利要求2所述的一种工业机器人转运装置,其特征在于:所述盒体(9)远离车体(1)的一面通过螺栓装配有可用于辅助移动的把手(13)。
6.根据权利要求5所述的一种工业机器人转运装置,其特征在于:所述把手(13)顶端表面通过螺栓装配有可用于操控的控制器(14)。
技术总结
本技术公开了一种工业机器人转运装置,包括车体,所述车体底端表面通过螺栓装配有可用于辅助支撑的轴承座,且轴承座有多组,两组所述轴承座之间转动安装有可用于传动的转轴,且转轴位于车体外侧的两端均法兰安装有可用于移动的车轮,所述转轴外周套设安装有可用于传动的蜗轮,且车体底端表面转动安装有与车轮相啮合连接的蜗杆,所述蜗杆远离蜗轮的一端装配有位于车体底端表面的减速器,且减速器动力输入端通过螺栓装配有可用于提供动力的驱动电机;该装置解决了现有的工业机器人转运设备移动起来需要工作人员手动来推动,才能够使其进行位移,而一些工业机器人的体型较大且较为笨重,导致转运装置移动起较慢,且效率较低,影响使用。
技术研发人员:焦海霞,吴文新
受保护的技术使用者:河南雨泽企业孵化器有限公司
技术研发日:20230605
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!