一种原地旋转的四轮移动底盘的制作方法
本技术涉及底盘领域,特别涉及一种原地旋转的四轮移动底盘。
背景技术:
1、机器人在国际上没有制定统一的标准,有的按负载重量分,有的按控制方式分,有的按自由度分,有的按结构分,有的按应用领域分。
2、在车体机器人移动的时候,通常是利用电动轮安装在底盘上进行移动,并且地盘上设置对两个电动轮前进方向调节的转向机构,但是利用转向机构改变其前进的方向,其需要运动一定的长度,在使用空间有限的情况下,不便于使其原地旋转转动换向。
技术实现思路
1、本实用新型的目的在于提供一种原地旋转的四轮移动底盘,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种原地旋转的四轮移动底盘,包括:
3、安装底盘和四个电动轮,四个所述电动轮设置于安装底盘的底部;
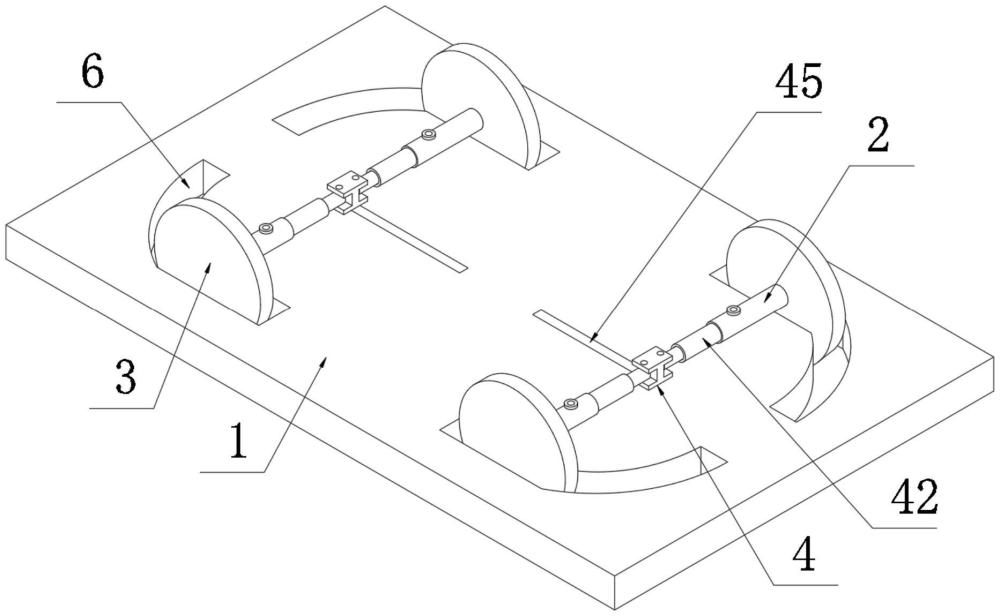
4、所述安装底盘底部的两侧均转动设置有两个安装轴,所述电动轮固定安装于安装轴外壁的底部,所述安装底盘上设置有用于改变安装轴角度的调节组件。
5、优选的,所述安装底盘的底部固定连接有四个安装销轴,所述安装销轴的外壁与安装轴转动穿插套接,所述安装底盘底部的两侧均对称开设有与电动轮相匹配的圆弧孔。
6、优选的,所述调节组件包括两个连接件,所述连接件滑动设置于安装底盘的底部,所述连接件的两侧均设置有连接杆,所述连接杆的外壁滑动套接有连接套筒。
7、优选的,所述连接套筒的一端与安装轴固定连接,所述连接件的两侧均固定连接有连接销轴,所述连接销轴的外壁与连接杆转动穿插套接。
8、优选的,所述安装底盘底部的两侧均开设有滑孔,所述连接件的顶部固定连接有固定杆,所述固定杆的顶部穿过滑孔固定连接有连接块。
9、优选的,所述安装底盘顶部的两侧均固定连接有固定板,两个所述固定板相对的一侧均转动连接有连接螺杆,所述连接螺杆的外壁与连接块螺纹穿插套接,两个所述连接螺杆外壁的螺纹反向相反。
10、优选的,所述安装底盘上表面的中部固定连接有换向器,所述换向器的一侧固定连接有伺服电机,所述伺服电机的输出端通过换向器与两个连接螺杆传动连接。
11、优选的,所述连接块的两侧均固定连接有导向块,所述固定板和换向器之间固定连接有两个导向杆,所述导向杆的外壁与导向块滑动穿插套接。
12、本实用新型的技术效果和优点:
13、本实用新型利用安装底盘、安装轴、电动轮和调节组件,安装轴通过安装销轴可以相对安装底盘转动,从而在调节组件的作用下,可以使四个电动轮转动,从而使四个电动轮运动轨迹在一个圆弧线上,从而四个电动轮转动,就可以带动安装底盘原地旋转换向。
技术特征:
1.一种原地旋转的四轮移动底盘,包括:
2.根据权利要求1所述的一种原地旋转的四轮移动底盘,其特征在于,所述安装底盘(1)的底部固定连接有四个安装销轴(5),所述安装销轴(5)的外壁与安装轴(2)转动穿插套接,所述安装底盘(1)底部的两侧均对称开设有与电动轮(3)相匹配的圆弧孔(6)。
3.根据权利要求1所述的一种原地旋转的四轮移动底盘,其特征在于,所述安装底盘(1)上表面的中部固定连接有换向器(49),所述换向器(49)的一侧固定连接有伺服电机(411),所述伺服电机(411)的输出端通过换向器(49)与两个连接螺杆(410)传动连接。
4.根据权利要求1所述的一种原地旋转的四轮移动底盘,其特征在于,所述连接块(47)的两侧均固定连接有导向块(412),所述固定板(48)和换向器(49)之间固定连接有两个导向杆(413),所述导向杆(413)的外壁与导向块(412)滑动穿插套接。
技术总结
本技术公开了一种原地旋转的四轮移动底盘,包括安装底盘和四个电动轮,电动轮设置于安装底盘的底部,安装底盘底部的两侧均转动设置有两个安装轴,电动轮固定安装于安装轴外壁的底部,安装底盘上设置有用于改变安装轴角度的调节组件,安装底盘的底部固定连接有四个安装销轴,安装销轴的外壁与安装轴转动穿插套接,安装底盘底部的两侧均对称开设有与电动轮相匹配的圆弧孔。本技术利用安装底盘、安装轴、电动轮和调节组件,安装轴通过安装销轴可以相对安装底盘转动,从而在调节组件的作用下,可以使四个电动轮转动,从而使四个电动轮运动轨迹在一个圆弧线上,从而四个电动轮转动,就可以带动安装底盘原地旋转换向。
技术研发人员:高博
受保护的技术使用者:北京简盟产品设计有限公司
技术研发日:20230608
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!