一种通用仿人行走智能机器人
本技术属于仿人行走智能机器人,尤其涉及一种通用仿人行走智能机器人。
背景技术:
1、机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
2、现有的仿人行走智能机器人,其本身可活动结构较少,降低其灵活性,在遇到复杂地形时,容易出现摔倒,导致仿人行走智能机器人零件受损,鉴于此,我们提出一种通用仿人行走智能机器人。
技术实现思路
1、本实用新型的目的是针对上述存在的技术问题,提供一种通用仿人行走智能机器人,达到在遇到复杂地形时,不容易出现摔倒的效果。
2、有鉴于此,本实用新型提供一种通用仿人行走智能机器人,包括脚板和设置在脚板顶端的行走机构,所述行走机构包括转身组件、脚踝组件、大腿组件和髋部组件;
3、所述转身组件包括转身框架、工作马达、蜗杆、蜗轮和转轴,所述脚板的顶端固定连接有转身框架,所述转身框架的内壁固定连接有工作马达,所述工作马达的输出端安装有蜗杆,所述蜗杆和蜗轮分别转动连接于转身框架,蜗轮的轴线与蜗杆的轴线垂直,所述蜗杆的啮合面啮合有蜗轮,所述蜗轮的顶端固定连接有转轴;
4、所述脚踝组件包括脚踝块、小腿板、第一连接环、第一液压缸和第一连接板,所述转轴的顶端固定连接有脚踝块,所述脚踝块的顶端旋接有小腿板,所述小腿板的外壁旋接有第一连接环,所述第一连接环的外壁固定连接有第一液压缸,所述第一液压缸的输出端旋接有与转身框架顶端固定连接的第一连接板;
5、所述大腿组件包括大腿板、第二连接环、第二液压缸和第二连接板,所述小腿板的顶端旋接有大腿板,所述大腿板的外壁旋接有第二连接环,所述第二连接环的外壁固定连接有第二液压缸,所述第二液压缸的输出端旋接有与小腿板顶端固定连接的第二连接板;
6、所述髋部组件包括髋部框架、第三液压缸、连接套和转动板,所述大腿板的顶端旋接有髋部框架,所述髋部框架的内壁旋接有第三液压缸,所述第三液压缸的输出端安装有连接套,所述连接套的外壁旋接有与大腿板顶端旋接的转动板。
7、基于上述结构,控制模块控制第三液压缸工作,第三液压缸工作通过连接套带动转动板转动,转动板转动带动大腿板转动,同时,控制模块控制第二液压缸工作,第二液压缸工作带动第二连接板转动,第二连接板转动带动小腿板转动,同时,控制模块控制第一液压缸工作,第一液压缸工作带动第一连接板转动,第一连接板转动脚踝块底端的脚板转动,通过两组脚板、两组小腿板和两组大腿板同步相对滑动,实现对机器人仿人行走操作。
8、优选的,所述髋部框架的顶端固定连接有机身框架,所述机身框架的内壁固定连接有平衡框架,所述平衡框架的顶端固定连接有轴向电机,所述轴向电机的输出端安装有螺纹杆,所述螺纹杆的外壁螺纹连接有螺纹滑块,所述螺纹滑块的外壁固定连接有与平衡框架外壁滑动连接的滑动杆,所述滑动杆的外壁套接有连接块,所述连接块的顶端固定连接有配重块,所述机身框架的内壁位于平衡框架的上方固定连接有控制模块,所述控制模块的一侧位于机身框架的内壁固定连接有平衡传感模块,所述控制模块远离平衡传感模块的一侧设置有与机身框架的内壁固定连接的信号接收模块,实现对机器人行走时的平衡操作。
9、优选的,所述脚踝块通过蜗杆和蜗轮与脚板之间构成旋转结构,实现对机器人转动的控制操作。
10、优选的,所述脚踝块通过第一液压缸和第一连接板与小腿板之间构成旋转结构,所述小腿板呈倾斜状,实现脚板转动的控制操作。
11、优选的,所述小腿板通过第二液压缸和第二连接板与大腿板之间构成旋转结构,所述小腿板的中轴线与第二连接板的中轴线相重合,实现小腿板转动的控制操作。
12、优选的,所述大腿板通过连接套和转动板与髋部框架之间构成旋转结构,实现大腿板转动的控制操作。
13、优选的,所述第三液压缸设置有两组,两组所述第三液压缸关于髋部框架呈中心对称,实现两组大腿板同步相对旋转的控制操作。
14、优选的,所述轴向电机设置有两组,两组所述轴向电机的中轴线相垂直,实现配重块进行定位操作。
15、优选的,所述连接块通过螺纹滑块和滑动杆与平衡框架之间构成滑动结构,实现对机器人行走时的平衡操作。
16、本实用新型的有益效果是:
17、1.该通用仿人行走智能机器人通过设置脚板、小腿板和大腿板,控制模块控制第三液压缸工作,第三液压缸工作通过连接套带动转动板转动,转动板转动带动大腿板转动,同时,控制模块控制第二液压缸工作,第二液压缸工作带动第二连接板转动,第二连接板转动带动小腿板转动,同时,控制模块控制第一液压缸工作,第一液压缸工作带动第一连接板转动,第一连接板转动脚踝块底端的脚板转动,通过两组脚板、两组小腿板和两组大腿板同步相对滑动,实现对机器人仿人行走操作,避免摔倒。
18、2.该通用仿人行走智能机器人通过设置配重块,螺纹滑块滑动带动滑动杆沿平衡框架的外壁滑动,滑动杆滑动带动连接块同步滑动,连接块滑动带动配重块同步滑动,配重块位置的改变,实现对机器人行走时的平衡操作。
技术特征:
1.一种通用仿人行走智能机器人,包括脚板(1)和设置在脚板(1)顶端的行走机构,其特征在于:所述行走机构包括转身组件、脚踝组件、大腿组件和髋部组件;
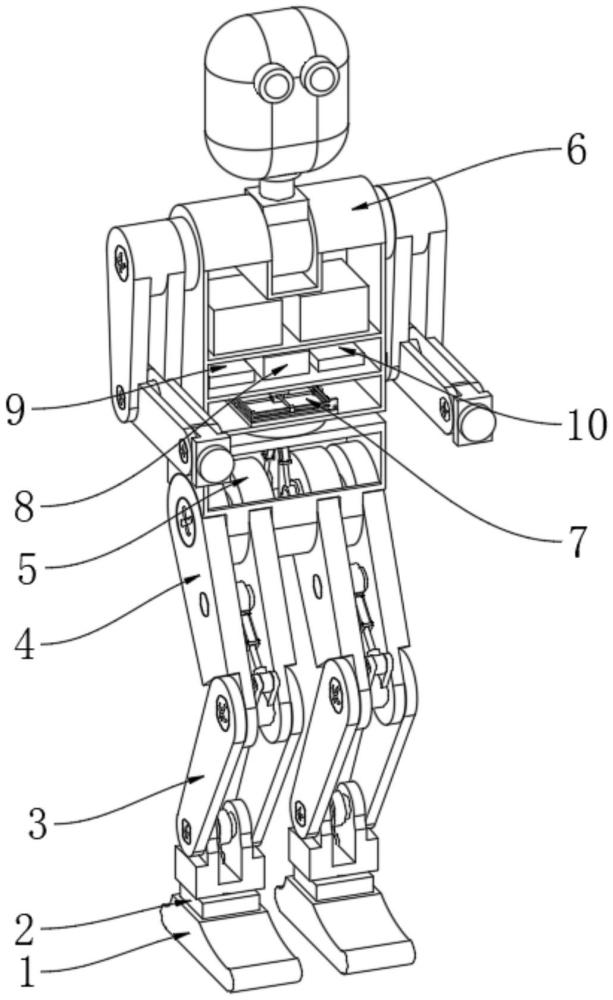
2.根据权利要求1所述的通用仿人行走智能机器人,其特征在于:所述髋部框架(5)的顶端固定连接有机身框架(6),所述机身框架(6)的内壁固定连接有平衡框架(7),所述平衡框架(7)的顶端固定连接有轴向电机(701),所述轴向电机(701)的输出端安装有螺纹杆(702),所述螺纹杆(702)的外壁螺纹连接有螺纹滑块(703),所述螺纹滑块(703)的外壁固定连接有与平衡框架(7)外壁滑动连接的滑动杆(704),所述滑动杆(704)的外壁套接有连接块(705),所述连接块(705)的顶端固定连接有配重块(706),所述机身框架(6)的内壁位于平衡框架(7)的上方固定连接有控制模块(8),所述控制模块(8)的一侧位于机身框架(6)的内壁固定连接有平衡传感模块(9),所述控制模块(8)远离平衡传感模块(9)的一侧设置有与机身框架(6)的内壁固定连接的信号接收模块(10)。
3.根据权利要求1所述的通用仿人行走智能机器人,其特征在于:所述脚踝块(3)通过蜗杆(202)和蜗轮(203)与脚板(1)之间构成旋转结构。
4.根据权利要求1所述的通用仿人行走智能机器人,其特征在于:所述脚踝块(3)通过第一液压缸(303)和第一连接板(304)与小腿板(301)之间构成旋转结构,所述小腿板(301)呈倾斜状。
5.根据权利要求1所述的通用仿人行走智能机器人,其特征在于:所述小腿板(301)通过第二液压缸(402)和第二连接板(403)与大腿板(4)之间构成旋转结构,所述小腿板(301)的中轴线与第二连接板(403)的中轴线相重合。
6.根据权利要求1所述的通用仿人行走智能机器人,其特征在于:所述大腿板(4)通过连接套(502)和转动板(503)与髋部框架(5)之间构成旋转结构。
7.根据权利要求1所述的通用仿人行走智能机器人,其特征在于:所述第三液压缸(501)设置有两组,两组所述第三液压缸(501)关于髋部框架(5)呈中心对称。
8.根据权利要求2所述的通用仿人行走智能机器人,其特征在于:所述轴向电机(701)设置有两组,两组所述轴向电机(701)的中轴线相垂直。
9.根据权利要求2所述的通用仿人行走智能机器人,其特征在于:所述连接块(705)通过螺纹滑块(703)和滑动杆(704)与平衡框架(7)之间构成滑动结构。
技术总结
本技术属于仿人行走智能机器人技术领域,尤其涉及一种通用仿人行走智能机器人,包括脚板和设置在脚板顶端的行走机构,行走机构包括转身组件、脚踝组件、大腿组件和髋部组件;该通用仿人行走智能机器人通过设置脚板、小腿板和大腿板,控制模块控制第三液压缸工作,第三液压缸工作通过连接套带动转动板转动,转动板转动带动大腿板转动,同时控制模块控制第二液压缸工作,第二液压缸工作带动第二连接板转动,第二连接板转动带动小腿板转动,同时控制模块控制第一液压缸工作,第一液压缸工作带动第一连接板转动,第一连接板转动脚踝块底端的脚板转动,通过两组脚板、两组小腿板和两组大腿板同步相对滑动,实现对机器人仿人行走操作,避免摔倒。
技术研发人员:孙健,汪舒仪,孙光东
受保护的技术使用者:广东科技学院
技术研发日:20230807
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!