全方位消防救援机器人
本技术涉及自动化救援机器人,具体地说是一种全方位消防救援机器人,可用于室内危险环境探测和救援。
背景技术:
1、近年来,随着城市化进程的不断加快,城市建筑物越来越多,安全管理不善、用火用电用气不慎等导致火灾频发。在建筑物发生火灾时,消防员不仅需要进行火场侦查、灭火等,还需要进入建筑物内部进行救援作业。传统的消防车无法进入楼层侦查,在楼层内部复杂危险的环境下,建筑物倒塌、有毒气体、可燃物的二次爆炸等情况,都会对消防救援人员的安全造成威胁,严重威胁城市公共安全。为此,研制可进入危险环境内部,并实时将内部危险环境信息传递出来的全方位救援机器人,能有效地做好探查救援工作,对人民的生命安全具有重大意义。
技术实现思路
1、为了解决建筑物内危险环境下内部信息未知传递不畅的难题,满足对危险环境探查救援工作的需求,本实用新型的目的在于提供一种可在建筑物内全方位消防救援的机器人。
2、本实用新型的目的是通过以下技术方案来实现的:
3、本实用新型包括车体、摆臂、信号传输模块、气体检测模块、环境感知模块、生命探测模块、行走驱动机构及仰俯驱动机构,其中车体左右两侧的前后两端分别安装有摆臂,每个所述摆臂均由安装在车体内独立的行走驱动机构驱动行走,所述车体内安装有两个仰俯驱动机构,每个所述仰俯驱动机构分别与车体每端左右两侧的摆臂相连,驱动所述摆臂完成仰俯动作;所述信号传输模块、气体检测模块、环境感知模块及生命探测模块分别安装在车体上;
4、所述摆臂包括摆臂轴、主驱动轴、履带驱动轮、麦克纳姆轮、履带、摆臂外侧板、摆臂内侧板及从动轮,所述摆臂外侧板与摆臂内侧板之间的一端转动安装有从动轮、另一端转动安装有麦克纳姆轮;所述主驱动轴的一端转动安装在车体上,并与所述行走驱动机构相连,由所述行走驱动机构驱动旋转,所述主驱动轴的另一端由摆臂内侧板穿过,并通过传动装置与麦克纳姆轮连接,所述摆臂内侧板与主驱动轴转动连接,所述摆臂外侧板与摆臂内侧板之间的主驱动轴上安装有履带驱动轮,所述履带驱动轮通过履带与从动轮相连;所述摆臂轴能够相对转动地嵌于主驱动轴内,所述摆臂轴的一端由主驱动轴的一端伸出,并与所述仰俯驱动机构连接,由所述仰俯驱动机构驱动旋转,所述摆臂轴的另一端由主驱动轴的另一端伸出,并与所述摆臂外侧板相连。
5、其中:所述车体左侧前端摆臂与右侧后端摆臂结构相同,均为左前右后摆臂,所述车体右侧前端摆臂与左侧后端摆臂结构相同,均为左后右前摆臂,所述左前右后摆臂与左后右前摆臂在结构上为镜像设置,所述左前右后摆臂中的麦克纳姆轮为左旋麦克纳姆轮,所述左后右前摆臂中的麦克纳姆轮为右旋麦克纳姆轮。
6、所述麦克纳姆轮的轮轴为轮驱动轴,所述轮驱动轴的两端分别与摆臂内侧板、摆臂外侧板转动连接;所述传动装置包括输入链轮、链条及输出链轮,所述输入链轮连接于主驱动轴的另一端,所述输出链轮安装在轮驱动轴上,并通过链条与所述输入链轮连接,将所述履带驱动轮的力矩传递到麦克纳姆轮。
7、所述输入链轮位于履带驱动轮与摆臂外侧板之间,所述输入链轮与摆臂外侧板之间的摆臂轴上安装有避免摆臂外侧板与输入链轮发生轴向移动而碰撞的推力轴承。
8、所述摆臂内侧板、摆臂外侧板上对应轮驱动轴的位置分别安装有轮固定座,所述轮驱动轴的两端分别通过轴承c与摆臂内侧板、摆臂外侧板上的轮固定座转动连接。
9、所述车体上对应主驱动轴的位置安装有摆臂底座,所述主驱动轴的一端通过轴承a转动安装于摆臂底座内;所述摆臂轴的另一端安装有外侧板底座及端盖,所述摆臂外侧板固接在外侧板底座上。
10、所述行走驱动机构包括行走电机、行走减速机、输出齿轮及输入齿轮,所述行走减速机固定在车体上,所述行走减速机的输入端与行走电机连接,所述行走减速机的输出端安装有输出齿轮,所述输入齿轮固接在所驱动摆臂的主驱动轴上,并与所述输出齿轮相啮合。
11、所述仰俯驱动机构包括仰俯电机、仰俯减速机及仰俯输出轴,所述仰俯减速机固定在车体上,所述仰俯减速机的输入端与仰俯电机连接,所述仰俯减速机的输出端两侧分别安装有仰俯输出轴,两侧的所述仰俯输出轴分别与车体前/后端左右两侧摆臂中的摆臂轴紧固连接;所述仰俯驱动机构同时驱动车体前/后端左右两侧对称的摆臂运动,实现摆臂的仰俯动作。
12、所述信号传输模块、气体检测模块及环境感知模块分别安装在车体的上部,所述信号传输模块用于机器人与远端操控系统的连接,所述气体检测模块用于检测机器人所在环境的气体成分,所述环境感知模块用于机器人识别周围环境信息;所述生命探测模块安装在车体的前端,用于探测机器人所经过的环境有无生命体征信息;所述信号传输模块、气体检测模块、环境感知模块及生命探测模块的共同作用实现对机器人所处环境信息的全部掌控。
13、所述机器人在仰俯驱动机构的作用下,改变摆臂的仰俯角度,实现机器人在履带型、全方位轮型和腿型运动模式之间的转换。
14、本实用新型的优点与积极效果为:
15、1.本实用新型兼具了履带型机器人的爬坡能力、麦克纳姆轮型机器人的全方位移动能力,增强了机器人在建筑物内各种环境的通过能力。
16、2.本实用新型摆臂中的履带和麦克纳姆轮由同一个电机驱动,精简了驱动的结构,使机器人更加紧凑。
17、3.本实用新型四个摆臂两两相同,呈镜像分布,采用模块化设计,结构简单轻便,运动灵活,适应性广泛,易于安装、操控精度高。
18、4.本实用新型机器人上搭载信号传输模块、气体检测模块、环境感知模块和生命探测模块,各个模块配合工作,提高机器人进入危险环境下获取信息和救援的效率。
技术特征:
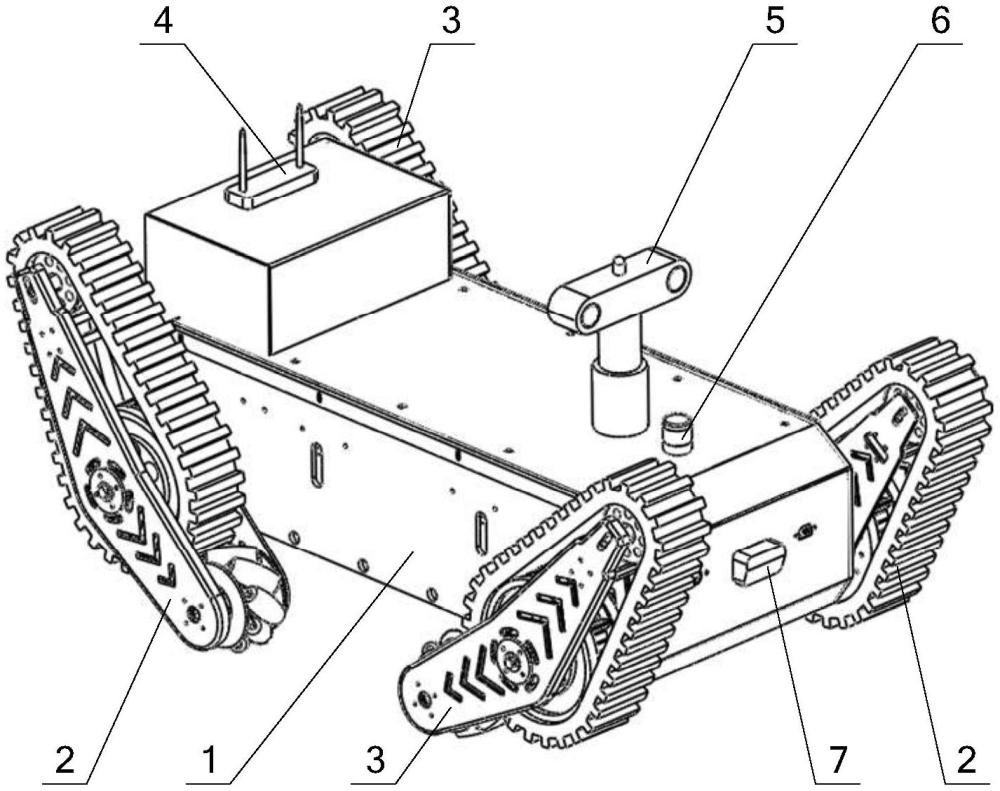
1.一种全方位消防救援机器人,其特征在于:包括车体(1)、摆臂、信号传输模块(4)、气体检测模块(5)、环境感知模块(6)、生命探测模块(7)、行走驱动机构(8)及仰俯驱动机构(9),其中车体(1)左右两侧的前后两端分别安装有摆臂,每个所述摆臂均由安装在车体(1)内独立的行走驱动机构(8)驱动行走,所述车体(1)内安装有两个仰俯驱动机构(9),每个所述仰俯驱动机构(9)分别与车体(1)每端左右两侧的摆臂相连,驱动所述摆臂完成仰俯动作;所述信号传输模块(4)、气体检测模块(5)、环境感知模块(6)及生命探测模块(7)分别安装在车体(1)上;
2.根据权利要求1所述的全方位消防救援机器人,其特征在于:所述车体(1)左侧前端摆臂与右侧后端摆臂结构相同,均为左前右后摆臂(2),所述车体(1)右侧前端摆臂与左侧后端摆臂结构相同,均为左后右前摆臂(3),所述左前右后摆臂(2)与左后右前摆臂(3)在结构上为镜像设置,所述左前右后摆臂(2)中的麦克纳姆轮为左旋麦克纳姆轮(19),所述左后右前摆臂(3)中的麦克纳姆轮为右旋麦克纳姆轮(18)。
3.根据权利要求1所述的全方位消防救援机器人,其特征在于:所述麦克纳姆轮的轮轴为轮驱动轴(16),所述轮驱动轴(16)的两端分别与摆臂内侧板(22)、摆臂外侧板(21)转动连接;所述传动装置包括输入链轮(13)、链条(14)及输出链轮(15),所述输入链轮(13)连接于主驱动轴(11)的另一端,所述输出链轮(15)安装在轮驱动轴(16)上,并通过链条(14)与所述输入链轮(13)连接,将所述履带驱动轮(12)的力矩传递到麦克纳姆轮。
4.根据权利要求3所述的全方位消防救援机器人,其特征在于:所述输入链轮(13)位于履带驱动轮(12)与摆臂外侧板(21)之间,所述输入链轮(13)与摆臂外侧板(21)之间的摆臂轴(10)上安装有避免摆臂外侧板(21)与输入链轮(13)发生轴向移动而碰撞的推力轴承(40)。
5.根据权利要求3所述的全方位消防救援机器人,其特征在于:所述摆臂内侧板(22)、摆臂外侧板(21)上对应轮驱动轴(16)的位置分别安装有轮固定座(17),所述轮驱动轴(16)的两端分别通过轴承c(38)与摆臂内侧板(22)、摆臂外侧板(21)上的轮固定座(17)转动连接。
6.根据权利要求1所述的全方位消防救援机器人,其特征在于:所述车体(1)上对应主驱动轴(11)的位置安装有摆臂底座(23),所述主驱动轴(11)的一端通过轴承a(36)转动安装于摆臂底座(23)内;所述摆臂轴(10)的另一端安装有外侧板底座(26)及端盖(27),所述摆臂外侧板(21)固接在外侧板底座(26)上。
7.根据权利要求1所述的全方位消防救援机器人,其特征在于:所述行走驱动机构(8)包括行走电机(30)、行走减速机(31)、输出齿轮(32)及输入齿轮(33),所述行走减速机(31)固定在车体(1)上,所述行走减速机(31)的输入端与行走电机(30)连接,所述行走减速机(31)的输出端安装有输出齿轮(32),所述输入齿轮(33)固接在所驱动摆臂的主驱动轴(11)上,并与所述输出齿轮(32)相啮合。
8.根据权利要求1所述的全方位消防救援机器人,其特征在于:所述仰俯驱动机构(9)包括仰俯电机(34)、仰俯减速机(35)及仰俯输出轴(41),所述仰俯减速机(35)固定在车体(1)上,所述仰俯减速机(35)的输入端与仰俯电机(34)连接,所述仰俯减速机(35)的输出端两侧分别安装有仰俯输出轴(41),两侧的所述仰俯输出轴(41)分别与车体(1)前/后端左右两侧摆臂中的摆臂轴(10)紧固连接;所述仰俯驱动机构(9)同时驱动车体(1)前/后端左右两侧对称的摆臂运动,实现摆臂的仰俯动作。
9.根据权利要求1所述的全方位消防救援机器人,其特征在于:所述信号传输模块(4)、气体检测模块(5)及环境感知模块(6)分别安装在车体(1)的上部,所述信号传输模块(4)用于机器人与远端操控系统的连接,所述气体检测模块(5)用于检测机器人所在环境的气体成分,所述环境感知模块(6)用于机器人识别周围环境信息;所述生命探测模块(7)安装在车体(1)的前端,用于探测机器人所经过的环境有无生命体征信息;所述信号传输模块(4)、气体检测模块(5)、环境感知模块(6)及生命探测模块(7)的共同作用实现对机器人所处环境信息的全部掌控。
10.根据权利要求1所述的全方位消防救援机器人,其特征在于:所述机器人在仰俯驱动机构(9)的作用下,改变摆臂的仰俯角度,实现机器人在履带型、全方位轮型和腿型运动模式之间的转换。
技术总结
本技术涉及自动化救援机器人,具体地说是一种全方位消防救援机器人,包括车体、四个摆臂、行走驱动机构、仰俯驱动机构、信号传输模块、气体检测模块、环境感知模块和生命探测模块,四个摆臂对称安装在车体上,左前右后摆臂和左后右前摆臂在结构上呈镜像分布,四个摆臂上的四个麦克纳姆轮对角线安装;四个摆臂分别通过安装在车体内的行走驱动机构和仰俯驱动机构实现履带驱动轮和麦轮的转动以及摆臂的仰俯动作;机器人通过四个摆臂的仰俯动作可以实现履带型、全方位轮型和腿型运动模式的转换。本技术可应用于高层楼梯环境的巡视救援,在楼梯狭小空间内全方位行走自如,具有模块化、运动灵活、结构紧凑、适应性广泛的特点。
技术研发人员:王聪,郑怀兵,刘铜,梁志达,刘春,刘启宇
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:20230831
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!