轮足机械腿及四足机器人
本技术涉及机器人,具体为一种轮足机械腿及四足机器人。
背景技术:
1、四足机器人发展到现如今在市面上最常见的有两种四足机器人,一种是从四足机器人开始到现在都还在研究的足式四足机器人,另一种是近来新的研究反向的轮式四足机器人。足式四足机器人相比于轮式四足机器人,它能在复杂的地形,如山地、洼地、田地等地形灵活运动作业,帮助人类在农业、林业、军事等领域进行工作。但它在平地上的性能就比不上轮式四足机器人,不仅耗能比轮式四足机器人大,速度也远远小于轮式四足机器人。
2、现在也有一些机器人综合了足式机器人和轮式机器人,轮足复合式机器人兼具足式机器人和轮式机器人的优点,但现有的轮足复合式机器人大部分只有一种腿部关节配置形式,且不可变换。四足机器人的应用环境复杂多变,仅有一种关节配置形式就会使得机器人的应用具有一定的局限性,因此,亟需进一步研究具备自动变换腿部关节配置形式以适应场景更广的四足机器人。
技术实现思路
1、本实用新型要解决的技术问题是:提供一种轮足机械腿及四足机器人,以解决现有技术存在的机器人腿部关节配置单一,自由度不高、灵活性和稳定性差的问题。
2、解决上述技术问题的技术方案是:一种轮足机械腿,包括髋关节、大腿和小腿,该轮足机械腿还包括驱动机构和传动机构;
3、所述驱动机构包括盘式电机ⅰ、盘式电机ⅱ和盘式电机ⅲ, 所述髋关节的一端与盘式电机ⅰ连接,髋关节的另一端通过盘式电机ⅱ与大腿的一端连接,大腿的另一端通过盘式电机ⅲ与小腿的内侧连接;
4、所述小腿的一端固定有轮子,小腿的另一端为足端,所述小腿内固定有传动机构,所述传动机构带动所述轮子转动。
5、本实用新型的进一步技术方案是:所述小腿的足端为圆柱形足端。
6、本实用新型的进一步技术方案是:所述小腿的端部延伸有支撑架,所述轮子固定在支撑架上。
7、本实用新型的进一步技术方案是:所述大腿包括大腿内侧板和大腿外侧板,大腿内侧板和大腿外侧板上相对开有若干个长条形孔,大腿内设置有减震机构,所述减震机构包括液压缓冲器和支撑块,所述支撑块活动安装在靠近小腿的大腿内端部,所述液压缓冲器通过支座安装在大腿内壁,液压缓冲器的冲击头顶在支撑块上;所述盘式电机ⅲ的侧面垂直于其轴线设置有一对耳板,所述耳板通过支撑轴与支撑块固定连接,耳板和支撑块一起沿着所述长条形孔滑动。
8、本实用新型的进一步技术方案是:所述耳板的长度长于所述长条形孔的长度。
9、本实用新型的再进一步技术方案是:所述传动机构包括主动齿轮、从动齿轮ⅰ、从动齿轮ⅱ、从动齿轮ⅲ、从动齿轮ⅳ、从动齿轮ⅴ和直流电机,所述从动齿轮ⅰ和从动齿轮ⅱ、从动齿轮ⅲ和从动齿轮ⅳ分别两两同轴安装在小腿内,从动齿轮ⅴ和所述轮子同轴安装在小腿端部,所述直流电机通过电机支座固定在小腿内,所述主动齿轮安装在直流电机的输出端,从动齿轮ⅰ与主动齿轮啮合传动,从动齿轮ⅱ和从动齿轮ⅲ啮合传动,从动齿轮ⅳ通过皮带带动从动齿轮ⅴ转动,进而带动所述轮子转动。
10、本实用新型的再进一步技术方案是:所述主动齿轮和从动齿轮ⅰ为伞齿轮。
11、本实用新型的再进一步技术方案是:所述直流电机的安装位置靠近所述盘式电机ⅲ。
12、本实用新型的另一个技术方案是:一种四足机器人,所述四足机器人包括
13、如上述任一所述的轮足机械腿。
14、由于采用上述结构,本实用新型之一种轮足机械腿及四足机器人与现有技术相比,具有以下有益效果:
15、1.灵活性高
16、本实用新型通过盘式电机ⅰ、盘式电机ⅱ和盘式电机ⅲ直接控制膝关节,四足机器人的关节配置形式有全膝式、全肘式、外膝肘式和内膝肘式,这四种形式可以来回切换,并且四足机器人也可以在足式四足机器人和轮式四足机器人间来回切换;
17、因此,本实用新型既有足式机器人在复杂地形灵活运动的能力,又有轮式机器人平地运动的低能耗、高速度的优点;在足式机器人的状态时,可根据不同的路况切换到最适合的关节配置形式,这样可以使本实用新型的四足机器人更容易应对复杂地形;并且,在遇到四种关节配置形式都应对不了的地形时,四足机器人的每条轮足机械腿都可以采用独自的关节模式来尝试应对,所以,本实用新型的四足机器人的腿部自由度和灵活性更高,能应对更多复杂的路况。
18、2.稳定性好
19、相较于其他机器人在满足条件时才能进行足式机器人和轮式机器人切换,本实用新型通过驱动机构直接将四足机器人切换为足式四足机器人或轮式四足机器人,稳定性和实用性更高;盘式电机ⅰ用于驱动髋关节绕盘式电机ⅰ左右摆动,减少机器人机身倾斜角度从而保持稳定状态,四足机器人在行走奔跑的状态中能更好的调整好姿态;
20、并且,本实用新型的四足机器人大腿内部设置有减震机构,缓冲器能够延长冲击载荷的作用时间,吸收并转化冲击载荷的作用能量,支撑轴和支撑块分摊支撑力,进而保护四足机器人的大腿,缓冲器安装的位置是在四足机器人的大腿上,这样不管是足式四足机器人还是轮式四足机器人都能起到减震的效果,减震机构使得本实用新型具有较好的稳定性;
21、进一步的,本实用新型的小腿足端为圆柱形足端,增加了接触面积使得四足机器人走得更平稳;四足机器人的轮子安装在小腿端部的支撑架上,传动机构作为轮子转动的动力来源,轮子转动时更稳定。
22、3.本实用新型通过盘式电机ⅲ直接控制四足机器人的小腿转动,比皮带、连杆控制小腿的转动精度更高。
23、4.本实用新型转换成轮式四足机器人后, 直流电机、大腿、轮子等部件都在一条直线上,因此比其他轮式机器人的姿态更省力,承载能力更高。
24、5.本实用新型的直流电机安装位置靠近盘式电机ⅲ,这样可以减少能量的损耗。
技术特征:
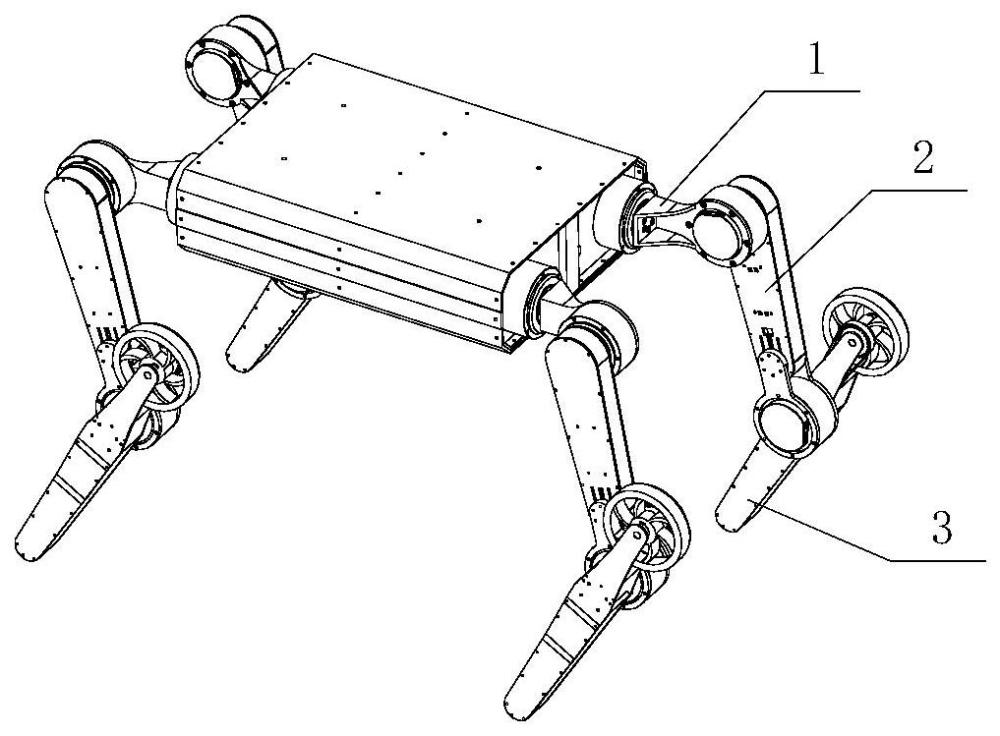
1.一种轮足机械腿,包括髋关节(1)、大腿(2)和小腿(3),其特征在于:该轮足机械腿还包括驱动机构(4)和传动机构(6);
2.根据权利要求1所述的轮足机械腿,其特征在于:所述小腿(3)的足端(33)为圆柱形足端。
3.根据权利要求1所述的轮足机械腿,其特征在于:所述小腿(3)的端部延伸有支撑架(32),所述轮子(31)固定在支撑架(32)上。
4.根据权利要求1所述的轮足机械腿,其特征在于:所述大腿(2)包括大腿内侧板(21)和大腿外侧板(22),大腿内侧板(21)和大腿外侧板(22)上相对开有若干个长条形孔(23),大腿(2)内设置有减震机构(5),所述减震机构(5)包括液压缓冲器(51)和支撑块(52),所述支撑块(52)活动安装在靠近小腿的大腿(2)内端部,所述液压缓冲器(51)通过支座安装在大腿(2)内壁,液压缓冲器(51)的冲击头(511)顶在支撑块(52)上;所述盘式电机ⅲ(43)的侧面垂直于其轴线设置有一对耳板(431),所述耳板(431)通过支撑轴与支撑块(52)固定连接,耳板(431)和支撑块(52)一起沿着所述长条形孔(23)滑动。
5.根据权利要求4所述的轮足机械腿,其特征在于:所述耳板(431)的长度长于所述长条形孔(23)的长度。
6.根据权利要求1所述的轮足机械腿,其特征在于:所述传动机构(6)包括主动齿轮(61)、从动齿轮ⅰ(62)、从动齿轮ⅱ(63)、从动齿轮ⅲ(64)、从动齿轮ⅳ(65)、从动齿轮ⅴ(66)和直流电机(67),所述从动齿轮ⅰ(62)和从动齿轮ⅱ(63)、从动齿轮ⅲ(64)和从动齿轮ⅳ(65)分别两两同轴安装在小腿(3)内,从动齿轮ⅴ(66)和所述轮子(31)同轴安装在小腿(3)端部,所述直流电机(67)通过电机支座固定在小腿(3)内,所述主动齿轮(61)安装在直流电机(67)的输出端,从动齿轮ⅰ(62)与主动齿轮(61)啮合传动,从动齿轮ⅱ(63)和从动齿轮ⅲ(64)啮合传动,从动齿轮ⅳ(65)通过皮带(68)带动从动齿轮ⅴ(66)转动,进而带动所述轮子(31)转动。
7.根据权利要求6所述的轮足机械腿,其特征在于:所述主动齿轮(61)和从动齿轮ⅰ(62)为伞齿轮。
8.根据权利要求7所述的轮足机械腿,其特征在于:所述直流电机(67)的安装位置靠近所述盘式电机ⅲ(43)。
9.一种四足机器人,其特征在于:所述四足机器人包括如权利要求1-8任一所述的轮足机械腿。
技术总结
一种轮足机械腿及四足机器人,涉及机器人技术领域,轮足机械腿包括髋关节、大腿、小腿、驱动机构和传动机构;驱动机构包括盘式电机Ⅰ、盘式电机Ⅱ和盘式电机Ⅲ,髋关节的一端与盘式电机Ⅰ连接,髋关节的另一端通过盘式电机Ⅱ与大腿的一端连接,大腿的另一端通过盘式电机Ⅲ与小腿的内侧连接,小腿的一端固定有轮子,小腿的另一端为足端,小腿内固定有传动机构,传动机构带动所述轮子转动;本技术的四足机器人既有足式机器人在复杂地形灵活运动的能力,又有轮式机器人平地运动的低能耗、高速度的优点;且四足机器人有四种关节配置形式,每条轮足机械腿还可以采用独自的关节模式,四足机器人的腿部自由度和灵活性更高,能应对更多复杂的路况。
技术研发人员:韦江华,陈文博,黄明旭,李权桂,李健,丛佩超,崔书婉,张阳平,雷一帆,唐琳珊,廖日朋,张杨,钟安棋
受保护的技术使用者:广西科技大学
技术研发日:20230901
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!