一种电力巡检机器人的自调节避障装置的制作方法
本技术涉及一种电力巡检机器人的自调节避障装置,属于巡检机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围的功能,在变电站中通常会使用巡检机器人来辅助巡检工人进行巡检,然而,现有的巡检机器人大多不具备自动避障的功能,需要人为控制机器人来实现避障的功能,同时当发生碰触时无法对内部的电气元件进行保护,造成电气元件的损坏,并且电气元件大多突出与机器人的外部,在不使用时不方便储存。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种电力巡检机器人的自调节避障装置,通过云台摄像机和红外线测距仪发现前方的障碍,并通过控制滚轮的转向实现本使用新型的转向,从而能实现自动避障的功能,同时阻挡组件能在发生碰撞时对电气元件进行防护,并且能够调整云台摄像机和红外线测距仪的高度,方便储存的同时提高了检查的范围。
2、本实用新型通过以下技术方案来实现上述目的,一种电力巡检机器人的自调节避障装置,包括安装块,所述安装块的上端中间位置滑动卡接有升降筒,所述升降筒的上端固定安装有安装板,所述安装板的上端一侧固定安装有中央处理器,所述安装板的上端另一侧固定安装有云台摄像机和红外线测距仪,所述云台摄像机和所述红外线测距仪与所述中央处理器电性连接,所述安装块的下端四角位置固定安装有滚轮,所述安装块的上端两侧均固定安装有阻挡组件,在使用时,所述云台摄像机和所述红外线测距仪能对本实用新型周围的环境进行识别,并将识别信息输送到所述中央处理器中进行处理,所述中央处理器发现障碍后通过控制所述滚轮的转向能实现本实用新型的转向,从而能实现自动避障,当发生碰撞时能通过所述阻挡组件进行缓冲,降低碰撞造成的损伤,并且能调整所述安装板的高度,在不使用时方便本实用新型的储存。
3、优选的,为了为本实用新型中的电气元件供电,同时控制本实用新型的移动方向,所述安装块的内部开设有电池槽,所述电池槽中安装有蓄电池,所述安装块的一侧固定安装有充电口,所述安装块的下端四角位置固定安装有第一控制电机,所述滚轮固定安装在所述第一控制电机的输出端,在使用时,通过所述中央处理器能对所述第一控制电机进行单独控制,从而能控制所述滚轮的转向和转速,使得本实用新型的行驶方向能够被控制,提高了避障的效果。
4、优选的,为了能带动所述安装板上下移动,从而方便进行储存,所述安装块的上端中间位置开设有滑槽,所述升降筒滑动卡接在所述滑槽中,所述安装块的下端固定安装有第二控制电机,所述第二控制电机的输出端固定安装有螺纹杆,所述升降筒的下端套接在所述螺纹杆上。
5、优选的,为了能在发生碰撞时进行缓冲,同时在不使用时能对所述云台摄像机和所述红外线测距仪进行保护,所述阻挡组件包括转动座,所述转动座固定安装在所述安装块的上端两侧,所述转动座上转动卡接有从动齿轮,所述从动齿轮的一侧固定安装有连接杆,所述连接杆的一端固定安装有挡板,所述挡板为u型结构,且所述挡板位于所述安装块的一侧,所述挡板的外部固定安装有缓冲垫,所述阻挡组件还包括第三控制电机,所述第三控制电机固定安装在所述安装块的上端一侧,所述第三控制电机的输出端固定安装有主动齿轮,所述主动齿轮与所述从动齿轮相啮合。
6、本实用新型的有益效果是:通过云台摄像机和红外线测距仪发现前方的障碍,并通过控制滚轮的转向实现本使用新型的转向,从而能实现自动避障的功能,同时阻挡组件能在发生碰撞时对电气元件进行防护,并且能够调整云台摄像机和红外线测距仪的高度,方便放置的同时提高了检查的范围。
技术特征:
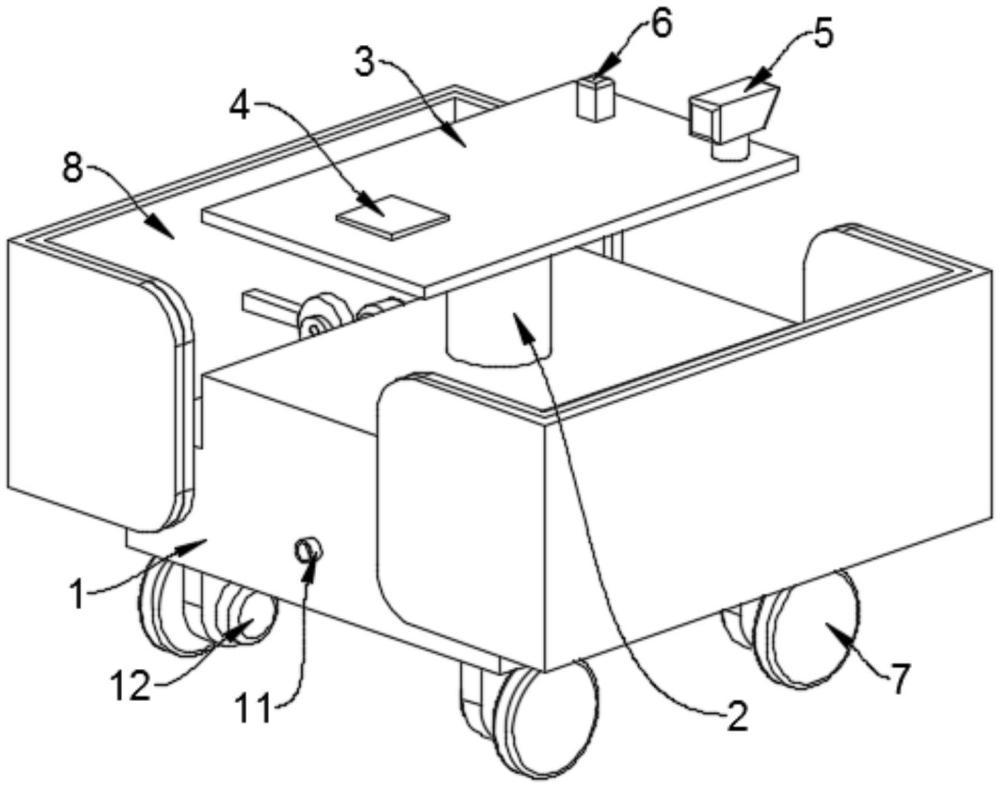
1.一种电力巡检机器人的自调节避障装置,其特征在于:包括安装块(1),所述安装块(1)的上端中间位置滑动卡接有升降筒(2),所述升降筒(2)的上端固定安装有安装板(3),所述安装板(3)的上端一侧固定安装有中央处理器(4),所述安装板(3)的上端另一侧固定安装有云台摄像机(5)和红外线测距仪(6),所述云台摄像机(5)和所述红外线测距仪(6)与所述中央处理器(4)电性连接,所述安装块(1)的下端四角位置固定安装有滚轮(7),所述安装块(1)的上端两侧均固定安装有阻挡组件(8)。
2.根据权利要求1所述的一种电力巡检机器人的自调节避障装置,其特征在于:所述安装块(1)的内部开设有电池槽(9),所述电池槽(9)中安装有蓄电池(10),所述安装块(1)的一侧固定安装有充电口(11)。
3.根据权利要求1所述的一种电力巡检机器人的自调节避障装置,其特征在于:所述安装块(1)的下端四角位置固定安装有第一控制电机(12),所述滚轮(7)固定安装在所述第一控制电机(12)的输出端。
4.根据权利要求1所述的一种电力巡检机器人的自调节避障装置,其特征在于:所述安装块(1)的上端中间位置开设有滑槽(13),所述升降筒(2)滑动卡接在所述滑槽(13)中。
5.根据权利要求1所述的一种电力巡检机器人的自调节避障装置,其特征在于:所述安装块(1)的下端固定安装有第二控制电机(14),所述第二控制电机(14)的输出端固定安装有螺纹杆(15),所述升降筒(2)的下端套接在所述螺纹杆(15)上。
6.根据权利要求1所述的一种电力巡检机器人的自调节避障装置,其特征在于:所述阻挡组件(8)包括转动座(801),所述转动座(801)固定安装在所述安装块(1)的上端两侧,所述转动座(801)上转动卡接有从动齿轮(802),所述从动齿轮(802)的一侧固定安装有连接杆(803)。
7.根据权利要求6所述的一种电力巡检机器人的自调节避障装置,其特征在于:所述连接杆(803)的一端固定安装有挡板(804),所述挡板(804)为u型结构,且所述挡板(804)位于所述安装块(1)的一侧,所述挡板(804)的外部固定安装有缓冲垫(805)。
8.根据权利要求7所述的一种电力巡检机器人的自调节避障装置,其特征在于:所述阻挡组件(8)还包括第三控制电机(806),所述第三控制电机(806)固定安装在所述安装块(1)的上端一侧,所述第三控制电机(806)的输出端固定安装有主动齿轮(807),所述主动齿轮(807)与所述从动齿轮(802)相啮合。
技术总结
本技术公开了一种电力巡检机器人的自调节避障装置,属于巡检机器人技术领域,包括安装块,安装块的上端中间位置滑动卡接有升降筒,升降筒的上端固定安装有安装板,安装板的上端一侧固定安装有中央处理器,安装板的上端另一侧固定安装有云台摄像机和红外线测距仪,云台摄像机和红外线测距仪与中央处理器电性连接,安装块的下端四角位置固定安装有滚轮,安装块的上端两侧均固定安装有阻挡组件,通过云台摄像机和红外线测距仪发现前方的障碍,并通过控制滚轮的转向实现本技术的转向,从而能实现自动避障的功能,同时阻挡组件能在发生碰撞时对电气元件进行防护,并且能够调整云台摄像机和红外线测距仪的高度,在不使用时方便进行储存。
技术研发人员:王念涛,张文乐
受保护的技术使用者:山东瓦利斯智能科技有限公司
技术研发日:20230904
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!