一种履带运输机器人
本技术涉及温室大棚智慧农业的发展,尤其涉及一种满足于现代温室大棚材采摘及物料搬运的履带运输机器人领域。
背景技术:
1、随着工业生产的发展和科学技术的进步,搬运机器人的应用领域越来越广泛,但是现有的搬运机器人结构相对比较简单、功能比较单一,在工作过程中通常需要配合其他机械一同完成工作任务,如在搬运过程中不能将所搬运的物品暂时存放从而导致搬运效率低;尤其是现有适用于不平整路面的履带式搬运机器人还存在如下缺陷,行走缓慢且遥控能力较差,在搬运过程中所搬运的物品易滑落。且采用直流无刷电机的现有的履带机器人,行走执行精准度差,电机运行的平稳和直线行驶效果均差强人意。
2、满足对现代温室大棚智慧农业发展的需要,在温室大棚内从事人工采摘作业时,果蔬的搬运过程伴随着劳动强度大,危险性高等弊端,广大菜农急需一款既能满足采摘需求,又具有定速巡航及运行平稳的一款履带式搬运机器人。
技术实现思路
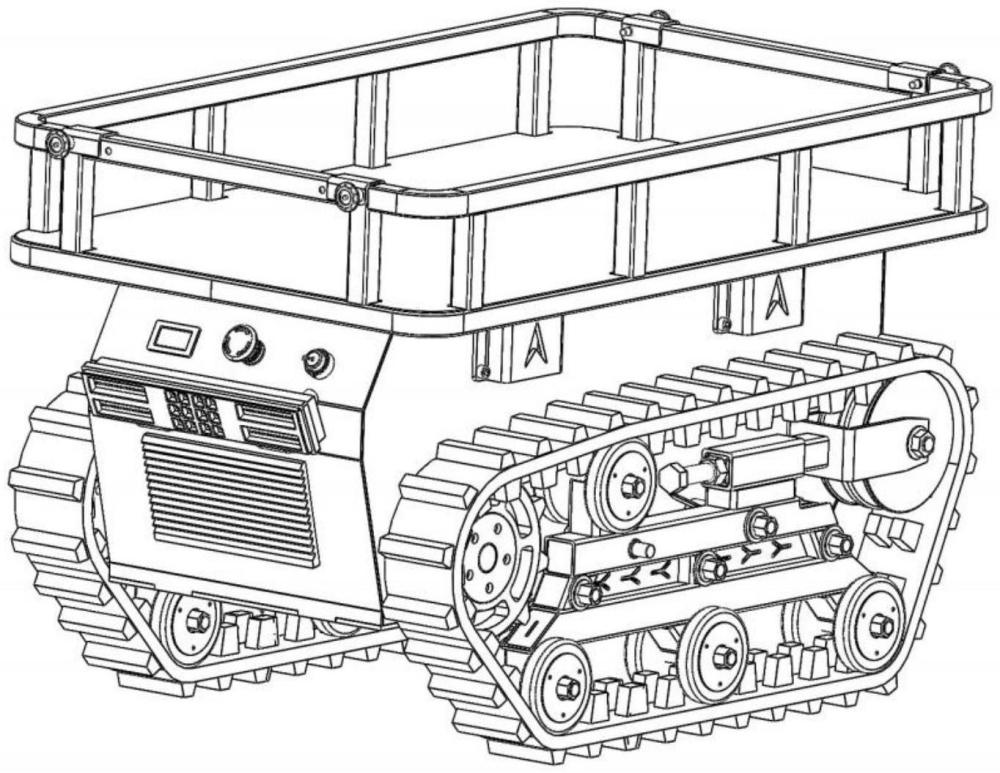
1、本实用新型提供了一种履带运输机器人,其中包括:底盘箱体、位于该底盘箱体之上的载货平台、位于该底盘箱体两侧的履带轮系系统;
2、该底盘箱体内部设有动力电池系统、智能控制系统和伺服动力驱动系统;
3、该伺服动力驱动系统包括伺服电机与该履带轮系系统的动力输入端相连,用于驱动该履带轮系系统运作;
4、该动力电池系统,电性连接该智能控制系统该伺服动力驱动系统,用于为该履带运输机器人的运动和工作部件提供电能;
5、该智能控制系统,用于根据接收的控制信号和/或预设程序,控制该履带运输机器人中用电器的运行状态。
6、所述的履带运输机器人,其中该伺服动力驱动系统包括两台伺服电机,分别用于驱动该履带轮系系统中一侧的履带轮系。
7、所述的履带运输机器人,其中该伺服电机通过减速箱驱动该履带轮系系统。
8、所述的履带运输机器人,其中该载货平台以方管型材为框架,以花纹板为底板覆盖面,且该载货平台固定连接至该底盘箱体顶部。
9、所述的履带运输机器人,其中该底盘箱体顶部和/或四周设有照明系统。
10、所述的履带运输机器人,其中该智能控制系统包括用于接收控制信号并采用can通讯方式的通讯模块。
11、所述的履带运输机器人,其中该用电器包括风扇、照明系统和伺服电机。
12、所述的履带运输机器人,其中该履带轮系系统由橡胶履带、履带轮框架固定座、涨紧轮、支撑轮、驱动轮组成。
13、所述的履带运输机器人,其中该履带轮系系统的履带轮框架采用型材铆焊结构。
14、由以上方案可知,本实用新型的优点在于:
15、为了克服现有的技术不足,本实用新型的目的之一在于提供一种履带运输机器人的运输系统,大大提高了大棚搬运工作的效率,从而也减少了人力物力,为建造温室大棚智慧农业的发展做出了绝大的贡献。且采用伺服电机驱动技术,以确保机器人的整机运行平稳及直线行驶。
16、履带运输机器人整体外廓尺寸为:980mm(长)*580mm(宽)*625mm(高),电压平台为48v直流平台,可选装48v铅酸电池及48v锂电。电池预留安装尺寸空间为:520mm(长)*300mm(宽)*190mm(高),在此空间内用户可以自行选择电池电量。动力总成采用48v750w双驱电机(伺服电机),rv63高性能蜗轮蜗杆减速机。驱动轮总成采用双排插齿结构加厚履带保证驱动不打滑,不脱带,运行平稳。行驶速度从2.4-4km/h可定制,遥控器带有定速巡航功能,可自由设定行驶速度。载货平台采用25*25*1.5方管结构通过抗扭梁结构设计,载货不变形,表面铺设1.5毫米厚碳钢花纹板,防滑性能好,料框及货物不容易滑动,摆放牢固可靠。整机负载能力为90公斤,能够满足采摘、搬运等不同的作业需求,整车离地间隙145mm,通过性好。可满足温室大棚、田间农作物搬运等场所应用。
技术特征:
1.一种履带运输机器人,其特征在于,包括:底盘箱体、位于该底盘箱体之上的载货平台、位于该底盘箱体两侧的履带轮系系统;
2.如权利要求1所述的履带运输机器人,其特征在于,该伺服动力驱动系统包括两台伺服电机,分别用于驱动该履带轮系系统中一侧的履带轮系。
3.如权利要求1所述的履带运输机器人,其特征在于,该伺服电机通过减速箱驱动该履带轮系系统。
4.如权利要求1所述的履带运输机器人,其特征在于,该载货平台以方管型材为框架,以花纹板为底板覆盖面,且该载货平台固定连接至该底盘箱体顶部。
5.如权利要求1所述的履带运输机器人,其特征在于,该底盘箱体顶部和/或四周设有照明系统。
6.如权利要求1所述的履带运输机器人,其特征在于,该智能控制系统包括用于接收控制信号并采用can通讯方式的通讯模块。
7.如权利要求1所述的履带运输机器人,其特征在于,该用电器包括风扇、照明系统和伺服电机。
8.如权利要求1所述的履带运输机器人,其特征在于,该履带轮系系统由橡胶履带、履带轮框架固定座、涨紧轮、支撑轮、驱动轮组成。
9.如权利要求1所述的履带运输机器人,其特征在于,该履带轮系系统的履带轮框架采用型材铆焊结构。
技术总结
本技术提出一种履带运输机器人,包括:底盘箱体、位于该底盘箱体之上的载货平台、位于该底盘箱体两侧的履带轮系系统;该底盘箱体内部设有动力电池系统、智能控制系统和伺服动力驱动系统;该伺服动力驱动系统包括伺服电机与该履带轮系系统的动力输入端相连,用于驱动该履带轮系系统运作;该动力电池系统,电性连接该智能控制系统该伺服动力驱动系统,用于为该履带运输机器人的运动和工作部件提供电能;该智能控制系统,用于根据接收的控制信号和/或预设程序,控制该履带运输机器人中用电器的运行状态。
技术研发人员:王鹏,张玉成,曹晓卫,高树琴
受保护的技术使用者:中国科学院计算技术研究所
技术研发日:20230925
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!