一种小型弹跳机器人
本技术属于移动机器人,更具体地说,是涉及一种小型弹跳机器人。
背景技术:
1、普通轮式或履带式驱动的机器人运行效率高,主要应用在各种玩具小车以及各种交通车辆方面,但对地面的要求比较高,轮式机器人只能通过比较平坦的地面,履带式机器人可以翻越一定尺寸的障碍物,但是机构比较笨重,在翻越较大尺寸障碍物或凹凸不平的地面时可能面临倾覆的危险。
2、轮式或履带式驱动的机器人在遇到较大的障碍物或者沟壑时,行动会受到很大的限制。因此,亟需一种可以越过较大的障碍物或者沟壑的弹跳机器人。
技术实现思路
1、本实用新型的目的在于提供一种小型弹跳机器人,旨在解决现有的机器人存在无法越过较大障碍物或者沟壑的问题。
2、为实现上述目的,本实用新型采用的技术方案是:提供一种小型弹跳机器人,包括:
3、架体,所述架体的底部安装有行走轮;
4、支撑轴,转动安装在所述架体上,所述支撑轴与所述行走轮的转轴保持平行;
5、棘轮,固定安装在所述支撑轴上;
6、棘爪,转动安装在所述架体上,所述棘爪与所述棘轮相对应;
7、储能电机,固定安装在所述架体上,用于驱动所述棘轮绕轴转动;
8、储能臂,固定安装在所述支撑轴上;
9、弹性储能件,安装在所述储能臂和所述架体之间;和
10、拨动件,用于对所述棘爪施加作用力,使所述棘爪脱离所述棘轮。
11、在一种可能的实现方式中,所述储能臂的数量为两个,以所述架体的中心对称布置。
12、在一种可能的实现方式中,所述储能电机的输出轴上固定安装有绕线盘,所述绕线盘与所述棘轮之间通过钢丝连接。
13、在一种可能的实现方式中,所述拨动件为推拉电磁铁。
14、在一种可能的实现方式中,所述棘爪上固定安装有挡销,所述推拉电磁铁的伸缩杆正对所述挡销。
15、在一种可能的实现方式中,所述弹性储能件为拉簧。
16、在一种可能的实现方式中,所述行走轮包括主动轮和从动轮,所述架体上固定安装有行走电机,所述行走电机用于驱动所述主动轮绕轴转动。
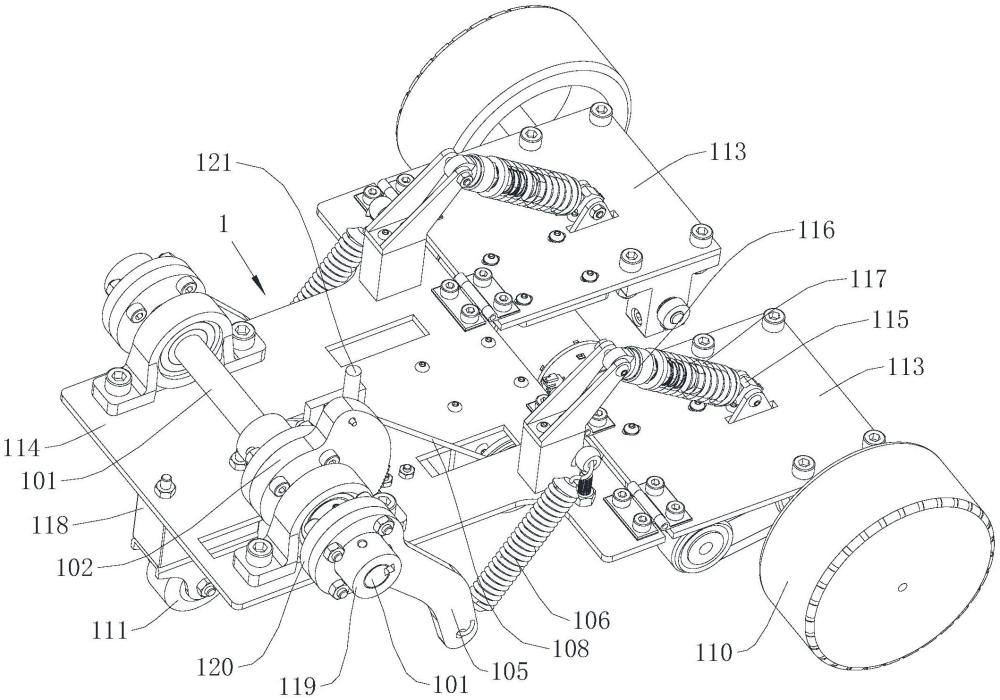
17、在一种可能的实现方式中,所述架体包括第一支撑板、第二支撑板和减震组件;所述第一支撑板和所述第二支撑板铰接连接,所述主动轮安装在所述第一支撑板上,所述从动轮安装在所述第二支撑板上;所述减震组件包括第一支撑杆、第二支撑杆和减震弹簧,所述第一支撑杆与所述第一支撑板铰接,所述第二支撑杆与所述第二支撑板铰接,所述减震弹簧安装在所述第一支撑杆和第二支撑杆之间。
18、在一种可能的实现方式中,所述第二支撑板的底面固定安装有减震器,所述从动轮固定安装在所述减震器上。
19、在一种可能的实现方式中,所述支撑轴的端部套装固定有衬套,所述衬套上设有法兰盘,所述储能臂的一端套装在所述衬套上并与所述法兰盘通过螺钉固定连接。
20、本申请实施例所示的方案,与现有技术相比,本实用新型的一种小型弹跳机器人,架体依靠行走轮在平坦的底面上行走。储能电机通过驱动棘轮绕轴转动,从而带动储能臂同步转动,弹性储能件在储能臂的作用下发生弹性变形,从而将储能臂的动能转化为弹性储能件的弹性势能,棘轮在棘爪的作用下不会发生反向转动。当机器人遇到较大障碍物或者沟壑时,拨动件对棘爪施加作用力从而使棘爪与棘轮发生脱离,储能臂在弹性储能件的作用下反向转动,即弹性储能件的弹性势能转化为储能臂的动能,储能臂与地面接触并受到地面的反作用力,从而完成跳跃。
技术特征:
1.一种小型弹跳机器人,其特征在于,包括:
2.如权利要求1所述的一种小型弹跳机器人,其特征在于,所述储能臂的数量为两个,以所述架体的中心对称布置。
3.如权利要求1所述的一种小型弹跳机器人,其特征在于,所述储能电机的输出轴上固定安装有绕线盘,所述绕线盘与所述棘轮之间通过钢丝连接。
4.如权利要求1所述的一种小型弹跳机器人,其特征在于,所述拨动件为推拉电磁铁。
5.如权利要求4所述的一种小型弹跳机器人,其特征在于,所述棘爪上固定安装有挡销,所述推拉电磁铁的伸缩杆正对所述挡销。
6.如权利要求1所述的一种小型弹跳机器人,其特征在于,所述弹性储能件为拉簧。
7.如权利要求1所述的一种小型弹跳机器人,其特征在于,所述行走轮包括主动轮和从动轮,所述架体上固定安装有行走电机,所述行走电机用于驱动所述主动轮绕轴转动。
8.如权利要求7所述的一种小型弹跳机器人,其特征在于,所述架体包括第一支撑板、第二支撑板和减震组件;所述第一支撑板和所述第二支撑板铰接连接,所述主动轮安装在所述第一支撑板上,所述从动轮安装在所述第二支撑板上;所述减震组件包括第一支撑杆、第二支撑杆和减震弹簧,所述第一支撑杆与所述第一支撑板铰接,所述第二支撑杆与所述第二支撑板铰接,所述减震弹簧安装在所述第一支撑杆和第二支撑杆之间。
9.如权利要求8所述的一种小型弹跳机器人,其特征在于,所述第二支撑板的底面固定安装有减震器,所述从动轮固定安装在所述减震器上。
10.如权利要求1所述的一种小型弹跳机器人,其特征在于,所述支撑轴的端部套装固定有衬套,所述衬套上设有法兰盘,所述储能臂的一端套装在所述衬套上并与所述法兰盘通过螺钉固定连接。
技术总结
本技术提供了一种小型弹跳机器人,属于移动机器人技术领域,包括架体、支撑轴、棘轮、棘爪、储能电机、储能臂、弹性储能件和拨动件。本技术提供的一种小型弹跳机器人,架体依靠行走轮在平坦的底面上行走。储能电机通过驱动棘轮绕轴转动,从而带动储能臂同步转动,弹性储能件在储能臂的作用下发生弹性变形,从而将储能臂的动能转化为弹性储能件的弹性势能,棘轮在棘爪的作用下不会发生反向转动。当机器人遇到较大障碍物或者沟壑时,拨动件对棘爪施加作用力从而使棘爪与棘轮发生脱离,储能臂在弹性储能件的作用下反向转动,即弹性储能件的弹性势能转化为储能臂的动能,储能臂与地面接触并受到地面的反作用力,从而完成跳跃。
技术研发人员:何隆,张亚,李波
受保护的技术使用者:中北大学
技术研发日:20231008
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!