一种运输机器人的运动组件
本技术涉及运输机器人,具体为一种运输机器人的运动组件。
背景技术:
1、运输机器人是指能够自主移动并用于搬运、运输物品的机器人系统。它们在工业、物流、仓储、医疗等领域具有广泛的应用前景。运输机器人的运动组件是实现其移动功能的关键部分。
2、现有的运输机器人通过滚轮进行路面上的移动,但在移动过程中会遇到一些台阶,滚轮无法越过台阶,造成运输机器人无法到达指定地点,从而使得运输机器人停滞不前。
技术实现思路
1、本实用新型的目的在于提供一种运输机器人的运动组件,以解决上述背景技术中提出的现有的运输机器人,通过滚轮无法越过台阶,造成运输机器人无法到达指定地点,从而使得运输机器人停滞不前的问题。
2、为实现上述目的,本实用新型提供如下技术方案,一种运输机器人的运动组件,包括:
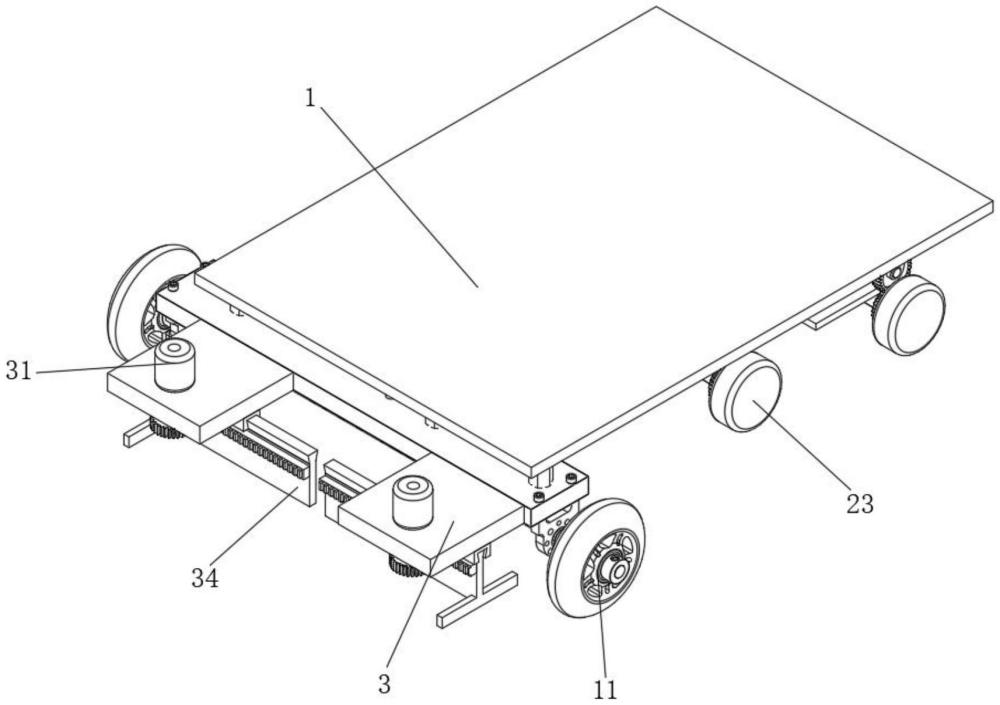
3、主体,包括运输机器人本体,所述运输机器人本体的下表面设置有固定滚轮;
4、升降机构,包括油缸,所述油缸固定连接在运输机器人本体的下表面,所述油缸的活塞杆上固定连接有连接架,所述油缸通过活塞杆带动连接架升降,所述连接架的下表面通过轴承转动连接有转轴,所述转轴的表面上固定连接有升降滚轮,所述转轴的表面上固定连接有第一齿轮,所述连接架的上表面固定连接有第一电机,所述第一电机的表面上设置有输出轴,所述第一电机的输出轴上固定连接有第二齿轮,所述第一电机通过输出轴带动第二齿轮转动。
5、优选的,所述运输机器人本体的表面上设置有清障机构,所述清障机构包括固定板,所述固定板固定连接在运输机器人本体的表面上,所述油缸的上表面固定连接有第二电机,所述第二电机的表面上设置有输出轴,所述第二电机的输出轴固定连接第三齿轮,所述第二电机通过输出轴带动第三齿轮转动,所述固定板的底部固定连接有导向杆,所述导向杆的表面上滑动连接有活动板,所述活动板的底部固定连接有清理板,所述活动板的表面上固定连接有齿条。
6、优选的,所述升降机构设置有两组,一组升降机构和固定滚轮在运输机器人本体的底部形成对称,另一组升降机构在运输机器人本体的中间位置。
7、优选的,所述连接架在升降的过程中带动升降滚轮升降,升降滚轮通过升降改变了和固定滚轮之间的水平位置关系。
8、优选的,所述第一齿轮和第二齿轮之间相互啮合,所述第二齿轮转动带动第一齿轮转动。
9、优选的,所述导向杆的表面上开设有梯形的导向槽,所述活动板的顶部设置有梯形的滑块,所述活动板通过梯形滑块在导向杆的梯形导向槽上滑动。
10、优选的,所述第三齿轮和齿条之间相互啮合,所述清理板平行于水平面,所述清理板的底部高于固定滚轮的底部。
11、与现有技术相比,本实用新型的有益效果是:
12、1、该运输机器人的运动组件,通过油缸、连接架、转轴、第一齿轮、第一电机和第二齿轮,完成了对升降滚轮的升降和驱动,其中两组升降滚轮配合上一组固定滚轮,保障了运输机器人本体在爬台阶的过程中有足够的支撑,并且升降滚轮通过不断地升降和驱动运输机器人本体移动,使得整个运输机器人本体能够完全移动至台阶上方,从而保障运输机器人本体能够越过台阶,到达指定位置,避免了运输机器人本体停滞不前的问题。
13、2、该运输机器人的运动组件,第二电机通过输出轴带动第三齿轮转动,第三齿轮带动齿条平移,齿条带动活动板在导向杆底部滑动,从而使得活动板带动清理板在固定滚轮的前方滑动,活动板滑动过程中将固定滚轮前方的障碍推到其他位置,从而避免了固定滚轮碰撞障碍,保障了运输机器人本体上方物品的安全。
技术特征:
1.一种运输机器人的运动组件,其特征在于,包括:
2.根据权利要求1所述的一种运输机器人的运动组件,其特征在于:所述运输机器人本体(1)的表面上设置有清障机构,所述清障机构包括固定板(3),所述固定板(3)固定连接在运输机器人本体(1)的表面上,所述油缸(2)的上表面固定连接有第二电机(31),所述第二电机(31)的表面上设置有输出轴,所述第二电机(31)的输出轴固定连接第三齿轮(32),所述第二电机(31)通过输出轴带动第三齿轮(32)转动,所述固定板(3)的底部固定连接有导向杆(33),所述导向杆(33)的表面上滑动连接有活动板(34),所述活动板(34)的底部固定连接有清理板(35),所述活动板(34)的表面上固定连接有齿条(36)。
3.根据权利要求1所述的一种运输机器人的运动组件,其特征在于:所述升降机构设置有两组,一组升降机构和固定滚轮(11)在运输机器人本体(1)的底部形成对称,另一组升降机构在运输机器人本体(1)的中间位置。
4.根据权利要求3所述的一种运输机器人的运动组件,其特征在于:所述连接架(21)在升降的过程中带动升降滚轮(23)升降,升降滚轮(23)通过升降改变了和固定滚轮(11)之间的水平位置关系。
5.根据权利要求4所述的一种运输机器人的运动组件,其特征在于:所述第一齿轮(24)和第二齿轮(26)之间相互啮合,所述第二齿轮(26)转动带动第一齿轮(24)转动。
6.根据权利要求2所述的一种运输机器人的运动组件,其特征在于:所述导向杆(33)的表面上开设有梯形的导向槽,所述活动板(34)的顶部设置有梯形的滑块,所述活动板(34)通过梯形滑块在导向杆(33)的梯形导向槽上滑动。
7.根据权利要求6所述的一种运输机器人的运动组件,其特征在于:所述第三齿轮(32)和齿条(36)之间相互啮合,所述清理板(35)平行于水平面,所述清理板(35)的底部高于固定滚轮(11)的底部。
技术总结
本技术涉及运输机器人技术领域,具体为一种运输机器人的运动组件,包括:主体,包括运输机器人本体;升降机构,包括油缸,所述油缸固定连接在运输机器人本体的下表面,所述油缸的活塞杆上固定连接有连接架,所述油缸通过活塞杆带动连接架升降,所述连接架的下表面通过轴承转动连接有转轴,所述转轴的表面上固定连接有升降滚轮。本技术通过油缸、连接架、转轴、第一齿轮、第一电机和第二齿轮,完成了对升降滚轮的升降和驱动,并且升降滚轮通过不断地升降和驱动运输机器人本体移动,使得整个运输机器人本体能够完全移动至台阶上方,从而保障运输机器人本体能够越过台阶,到达指定位置,避免了运输机器人本体停滞不前的问题。
技术研发人员:张鹏远,张耀航,吴岩,付渝,陈潇
受保护的技术使用者:中国石油大学(华东)
技术研发日:20231010
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!