方向盘零偏角更新方法、装置、计算机设备和存储介质与流程
本技术涉及无人驾驶,特别是涉及一种方向盘零偏角更新方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、在无人驾驶系统中,方向盘转角控制对车辆能否沿着预定轨迹行驶有很大的影响。即便是同一车型,车辆在出厂时安装方向盘多少会有机械差异,即车辆严格按照直线行驶时,方向盘转角不是零,该角度(方向盘零偏角)每辆车都有所不同。若是该角度标定得不准确,也会导致车辆在巡航时(尤其是高速)产生轨迹的横向偏移,增加自动驾驶的安全风险。此外,车辆在路上行驶时受到转向零部件老化、载重情况及路面倾斜等影响,零偏角度也会有轻微的变化。若方向盘零偏角不具备实时更新能力,同样无法避免上述安全风险。还有,车辆处于自动驾驶模式时,若方向盘遇到驾驶员的轻微干扰,即触发人机共驾功能,车辆行驶时会偏离规划轨迹,很可能对零偏角的辨识造成影响。
2、传统技术中,为消除方向盘零偏角对自动驾驶控制系统带来的安全风险,需要实时更新准确的方向盘零偏角。之前很多方向盘零偏角标定或者测量方式,有些要求车辆严格按照直线行驶,人工控制方向盘驾驶车辆,该过程中存在人为的转角误差,测量结果难以保证精准度,且缺乏实时性,渐渐不再使用。
3、目前的方向盘零偏角的测量精准度较低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高方向盘零偏角的测量精准度的方向盘零偏角更新方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种方向盘零偏角更新方法,包括:
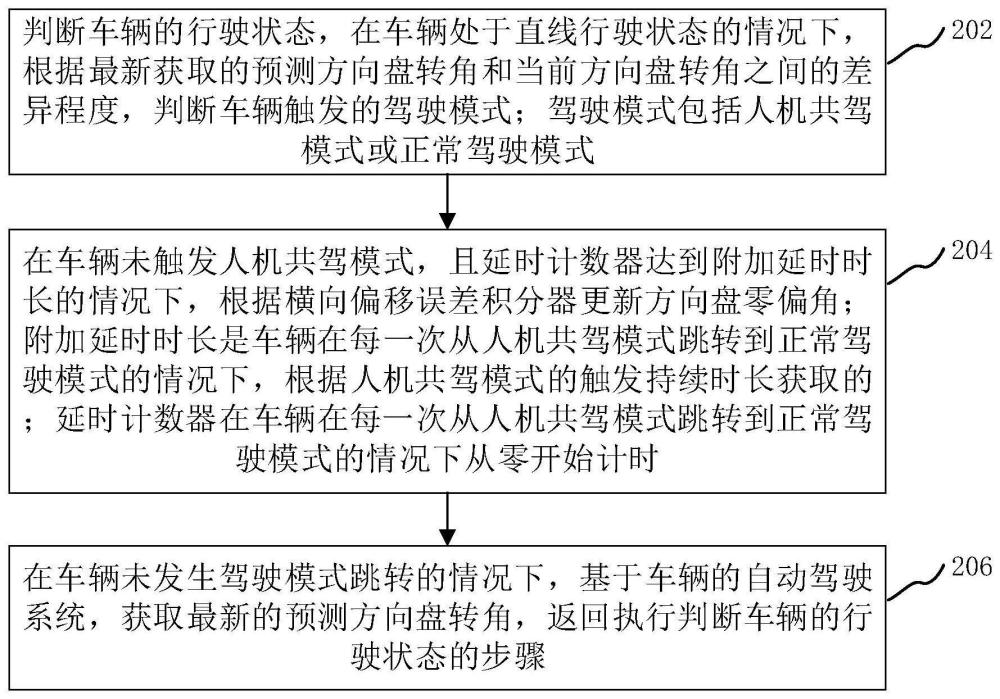
3、判断车辆的行驶状态,在车辆处于直线行驶状态的情况下,根据最新获取的预测方向盘转角和当前方向盘转角之间的差异程度,判断车辆触发的驾驶模式;驾驶模式包括人机共驾模式或正常驾驶模式;
4、在车辆未触发人机共驾模式,且延时计数器达到附加延时时长的情况下,根据横向偏移误差积分器更新方向盘零偏角;附加延时时长是车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下,根据人机共驾模式的触发持续时长获取的;延时计数器在车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下开始计时;
5、在车辆未发生驾驶模式跳转的情况下,基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。
6、在其中一个实施例中,方法还包括:
7、在车辆不处于直线行驶状态的情况下,停止更新方向盘零偏角,将最新更新的方向盘零偏角保持不变;
8、在车辆未发生驾驶模式跳转的情况下,基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。
9、在其中一个实施例中,方法还包括:
10、在车辆触发人机共驾模式的情况下,停止更新方向盘零偏角,将最新更新的方向盘零偏角保持不变;
11、在车辆未发生驾驶模式跳转的情况下,基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。
12、在其中一个实施例中,方法还包括:
13、在车辆从正常驾驶模式跳转到人机共驾模式的情况下,获取人机共驾初始时刻;
14、基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。
15、在其中一个实施例中,方法还包括:
16、在车辆从人机共驾模式跳转到正常驾驶模式的情况下,根据人机共驾初始时刻,获取车辆触发人机共驾模式的触发持续时长,根据触发持续时长更新附加延时时长;
17、基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。
18、在其中一个实施例中,横向偏移误差积分器的获取方式,包括:
19、根据车辆的车速和曲率,获取积分增益;
20、基于车辆的自动驾驶系统,获取车辆行驶的横向偏移误差;横向偏移误差用于表征自动驾驶系统的规划行驶路线和车辆的实际行驶路线之间的差异程度;
21、根据积分增益和横向偏移误差的乘积,构建横向偏移误差积分器。
22、第二方面,本技术还提供了一种方向盘零偏角更新装置,包括:
23、判定模块,用于判断车辆的行驶状态,在车辆处于直线行驶状态的情况下,根据最新获取的预测方向盘转角和当前方向盘转角之间的差异程度,判断车辆触发的驾驶模式;驾驶模式包括人机共驾模式或正常驾驶模式;
24、更新模块,用于在车辆未触发人机共驾模式,且延时计数器达到附加延时时长的情况下,根据横向偏移误差积分器更新方向盘零偏角;附加延时时长是车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下,根据人机共驾模式的触发持续时长获取的;延时计数器在车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下开始计时;
25、迭代模块,用于在车辆未发生驾驶模式跳转的情况下,基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。
26、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
27、判断车辆的行驶状态,在车辆处于直线行驶状态的情况下,根据最新获取的预测方向盘转角和当前方向盘转角之间的差异程度,判断车辆触发的驾驶模式;驾驶模式包括人机共驾模式或正常驾驶模式;
28、在车辆未触发人机共驾模式,且延时计数器达到附加延时时长的情况下,根据横向偏移误差积分器更新方向盘零偏角;附加延时时长是车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下,根据人机共驾模式的触发持续时长获取的;延时计数器在车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下开始计时;
29、在车辆未发生驾驶模式跳转的情况下,基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。
30、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
31、判断车辆的行驶状态,在车辆处于直线行驶状态的情况下,根据最新获取的预测方向盘转角和当前方向盘转角之间的差异程度,判断车辆触发的驾驶模式;驾驶模式包括人机共驾模式或正常驾驶模式;
32、在车辆未触发人机共驾模式,且延时计数器达到附加延时时长的情况下,根据横向偏移误差积分器更新方向盘零偏角;附加延时时长是车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下,根据人机共驾模式的触发持续时长获取的;延时计数器在车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下开始计时;
33、在车辆未发生驾驶模式跳转的情况下,基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。
34、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
35、判断车辆的行驶状态,在车辆处于直线行驶状态的情况下,根据最新获取的预测方向盘转角和当前方向盘转角之间的差异程度,判断车辆触发的驾驶模式;驾驶模式包括人机共驾模式或正常驾驶模式;
36、在车辆未触发人机共驾模式,且延时计数器达到附加延时时长的情况下,根据横向偏移误差积分器更新方向盘零偏角;附加延时时长是车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下,根据人机共驾模式的触发持续时长获取的;延时计数器在车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下开始计时;
37、在车辆未发生驾驶模式跳转的情况下,基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。
38、上述方向盘零偏角更新方法、装置、计算机设备、存储介质和计算机程序产品,判断车辆的行驶状态,在车辆处于直线行驶状态的情况下,根据最新获取的预测方向盘转角和当前方向盘转角之间的差异程度,判断车辆触发的驾驶模式;驾驶模式包括人机共驾模式或正常驾驶模式;在车辆未触发人机共驾模式,且延时计数器达到附加延时时长的情况下,根据横向偏移误差积分器更新方向盘零偏角;附加延时时长是车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下,根据人机共驾模式的触发持续时长获取的;延时计数器在车辆在每一次从人机共驾模式跳转到正常驾驶模式的情况下开始计时;在车辆未发生驾驶模式跳转的情况下,基于车辆的自动驾驶系统,获取最新的预测方向盘转角,返回执行判断车辆的行驶状态的步骤。能够提高方向盘零偏角的测量精准度。
- 还没有人留言评论。精彩留言会获得点赞!