一种以波动胸鳍为动力的单主轴单电机仿鳐鱼机器鱼的制作方法
[0001]
本实用新型属于仿生机器鱼技术应用领域,特别涉及一种以波动胸鳍为动力的单主轴单电机仿鳐鱼机器鱼。
背景技术:
[0002]
近些年来,随着陆地资源的日渐匮乏,人们对深海资源的开发与利用有着强烈的需求,这一现状为水下机器人研究提供了广泛的背景与需要。于是,水中机器人被世界上许多国家视作一个重点研究项目并大力发展。目前,传统的螺旋桨常被用作水下机器人的推进器,体积大,质量大,能耗高,综合效率低,瞬时响应滞后,运动灵活性差,伴随着较大的噪声和尾涡。螺旋桨效率低也是水下机器人能源瓶颈的主要原因之一。所以传统的螺旋桨式水下机器人无法适应未来海洋勘测、海底探查、海洋救捞、海底管道检测、以及水下侦查和跟踪的全部任务,寻找新的水下机器人推进方式刻不容缓。
[0003]
鱼类,这一经过数亿年的自然选择,已经进化出了非凡的水中运动能力的动物种类,为人们研究水下机器人提供了新的途径。如果我们能够制造出模仿鱼的运动方式的水下机器人,运用先进的现代水下导航、检测和控制技术对其进行控制,就可以完成许多目前无法完成的任务,大大提高水下作业的效率。鱼类游动具有速度快、效率高、机动性强、噪声低等特点,因此在水下机器人的设计研究中采用鱼类推进与控制系统取代传统的桨舵系统具有十分重要的意义。
[0004]
仿生机器鱼的研究已经成为当今仿生学研究领域的热点,但是目前对鱼类的仿生研究主要集中在对bcf推进模式鱼类的研究上,而针对mpf推进模式鱼类的研究,尤其是对以胸鳍波动方式推进的鳐鱼的研究较少。而以蝠鲼、大西洋牛鼻鲼等为典型代表的鳐形目鱼类,具有良好的运动性能,游动机动性强,鱼鳍受载面积大,游动扰动小,擅长长距离迁徙游动,其超凡的游动机动性能、低扰动性和高效率是传统的螺旋桨推进系统所望尘莫及的。鳐鱼的游动推进模式具有高机动性、低扰动性以及高效率等传统推进系统所不具备的优点,为人类研究和开发能够更好地适应海洋水下环境的推进系统提供了模仿对象,针对该种鱼进行仿生学研究是十分必要的。
[0005]
专利cn102079371a公开了一种利用侧鳍作为振源在柔性膜上形成一系列向后移动的波从而产生推进力的适合于深海探测或作业的仿生机器鱼。该机器鱼通过主舱体的左右半壳体后部凹腔内侧鳍上下移动的推进机构带动鱼鳍,用磁力改变机器鱼的重心来调整方向。但是其波动鱼鳍的运动范围较小,不能为机器鱼提供强大的动力,且其在运动过程中,仅有两个鱼鳍柔软鱼鳍,无法适应复杂环境,同时利用磁力改变重心的方式实现上浮下沉不够稳定。
技术实现要素:
[0006]
本实用新型是为解决现有水下航行器存在的动力单一、对水纹扰动大、隐蔽性差以及难以同时实现后退后转运动的问题,进而提供一种以波动胸鳍为动力的单主轴单电机
仿鳐鱼机器鱼。
[0007]
本实用新型为实现上述目的所采取的技术方案如下:
[0008]
本实用新型以波动胸鳍为动力的单主轴单电机仿鳐鱼机器鱼,其特点在于:该机器鱼包括主动力模块、波动幅度调整模块、主侧动力调节模块、副侧动力调节模块、变向电控模块;所述主动力模块包括侧轴、动力杆、摆动鳍骨、滑块和机体;所述侧轴对称分布于中心线两侧,与机体通过轴承连接形成转动副;所述动力杆一端铰接于所述侧轴,另一端与所述摆动鳍骨一端铰接形成转动副;所述摆动鳍骨与所述滑块通过移动副连接。
[0009]
本实用新型以波动胸鳍为动力的单主轴单电机仿鳐鱼机器鱼,其特点在于:所述波动幅度调整模块包括调幅滑块、调幅丝杠、调幅舵机和所述机体;所述调幅滑块与所述滑块铰接形成转动副;所述调幅滑块与所述调幅丝杠以螺旋副连接,所述调幅丝杠两端外螺旋旋向相反;所述调幅舵机装夹所述调幅丝杠;所述调幅舵机与所述机体固定。
[0010]
本实用新型以波动胸鳍为动力的单主轴单电机仿鳐鱼机器鱼,其特点还在于:所述主侧动力调节模块包括主侧外部锥齿轮、主轴、主侧主轴锥齿轮、主侧复合齿轮、主侧输出齿轮、所述侧轴以及所述机体;所述主轴与主侧主轴锥齿轮通过轴承形成转动副;所述主侧主轴锥齿轮与所述主侧外部锥齿轮形成齿轮副;所述主侧外部锥齿轮与所述主侧复合齿轮形成齿轮副;所述主侧复合齿轮与所述主侧输出齿轮形成齿轮副;所述主侧输出齿轮通过轴承与所述侧轴连接形成转动副;所述主侧输出齿轮与所述动力杆固连。
[0011]
所述副侧动力调节模块包括副侧主轴齿轮、副侧输出齿轮、所述主轴和所述侧轴;所述副侧主轴齿轮通过轴承与所述主轴形成转动副;所述副侧输出齿轮与所述副侧主轴齿轮通过齿轮副连接;所述侧轴与所述副侧输出齿轮通过轴承连接形成转动副。
[0012]
所述变向电控模块包括主侧电控锁定装置和副侧电控锁定装置;所述主侧电控锁定装置连接在所述主轴与所述主侧主轴锥齿轮之间;所述副侧电控锁定装置连接在所述主轴与所述副侧主轴齿轮之间。
[0013]
所述主侧外部锥齿轮、所述主侧电控锁定装置、所述主侧主轴锥齿轮、所述主侧复合齿轮、所述副侧电控锁定装置、所述主侧输出齿轮、所述副侧主轴齿轮、所述副侧输出齿轮以串联方式集合任意数量于同一根所述主轴上。
[0014]
与已有技术相比,本实用新型有益效果体现在:
[0015]
1.本实用新型采用单主轴分配运动的方式,实现单电机带动机器鱼鱼鳍模拟简谐波,减少对电机的需求,并可将此器械系统布置于狭长机体。
[0016]
2.本实用新型采用单舵机实现鱼鳍摆动幅度的调节,配合齿轮机构不同传动比,可实现一定振幅、一定传递速度简谐波的任意调节,以适应各种工作环境。
[0017]
3.本实用新型的机器鱼采用两个锁合器实现单电机下机器鱼的前进与转向,并可通过控制简谐波形实现机器鱼的后退,满足一定工作条件的机动性要求。
[0018]
4.本实用新型可在主轴上集成任意数量的鳍骨,并且可改变相邻鳍骨的相对相位,进一步拓宽对工作环境的适应力。
[0019]
5.本实用新型的鱼鳍除可用于模拟简谐波实现运动外,其具备面积大的特点,在鱼鳍上布置太阳能板可实现机器鱼持续工作的需要。
[0020]
6.实用新型运用简谐波实现机器鱼位移的方式,具备噪声小、对流体影响小等特点,隐蔽性好。
附图说明
[0021]
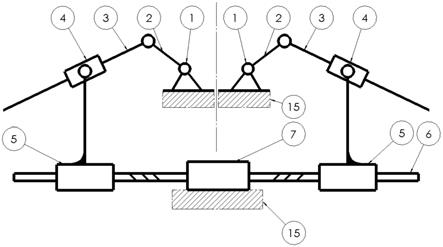
图1为机器鱼杆件机构的示意图;
[0022]
图2为机器鱼齿轮传动机构的示意图;
[0023]
图3建模整体效果参考图;
[0024]
其中:1侧轴,2动力杆,3摆动鳍骨,4滑块,5调幅滑块,6调幅丝杠,7调幅舵机,8主侧外部锥齿轮,9主轴,10主侧电控锁定装置,11主侧主轴锥齿轮,12主侧复合齿轮, 13副侧电控锁定装置,14主侧输出齿轮,15机体,16副侧主轴齿轮,17副侧输出齿轮。
具体实施方式
[0025]
该机器鱼包括主动力模块、波动幅度调整模块、主侧动力调节模块、副侧动力调节模块、变向电控模块。
[0026]
如图2所示,当机器鱼前进时,主侧电控锁定装置10和副侧电控锁定装置13同时锁合,并用电机向主轴9输出连续周转运动。主轴9的运动带动主侧主轴锥齿轮11转动,并通过主侧外部锥齿轮8、主侧复合齿轮12和主侧输出齿轮14多级齿轮传动,将运动传递至机器鱼一侧;同时主轴9的运动又带动副侧主轴齿轮16转动,通过副侧主轴齿轮16与副侧输出齿轮17的齿轮啮合将运动传递至机器鱼另一侧。此时主侧输出齿轮14和副侧主轴齿轮16周转运动方向相反。结合图1所示机构,主侧输出齿轮14与副侧主轴齿轮16由分别将反向的运动传递至动力杆2,侧轴1为动力杆提供固定与摆动中心并连接前后的运动单元,继而通过摆动鳍骨3和滑块4将反向旋转的运动转化为摆动鳍骨3上下同步运动。机体15为整个运动单元提供固定。多组该单元串联在同一主轴,通过给与各单元相同的相位差,便可模拟简谐波形使机器鱼前进。
[0027]
如图2所示,当机器鱼转向时,通过锁合主侧电控锁定装置10并释放副侧电控锁定装置 13,或释放主侧电控锁定装置10并锁合副侧电控锁定装置13,可实现机器鱼的左右转向。具体运作方式如下。当锁合主侧电控锁定装置10并释放副侧电控锁定装置13时,主轴9只能将动力传输至单侧,由于机器鱼单侧形成简谐波,另一侧运动逐渐停止,可实现机器鱼向运动停止侧转向。若释放主侧电控锁定装置10并锁合副侧电控锁定装置13,则同理,实现机器鱼向另一侧转向。
[0028]
当机器鱼后退时,通过电机反转即可模拟与前进时简谐波传递方向相反的波形,实现机器鱼的后退。
[0029]
当机器鱼在后退时,同上述前进转向的思路,也可实现机器鱼后转的运动。
[0030]
如图1所示,当机器鱼鱼鳍振幅需要调整时,可通过启动调幅舵机7实现。通过控制调幅舵机7向调幅丝杠6传递旋转运动,带动调幅滑块5在中心线两侧反向运动,从而改变滑块4的位置,实现摆动鳍骨3振幅的调节。
[0031]
将图1与图2所示机构相结合成图3所示整体结构,便可实现机器鱼的前进、后退、前转向、后转向运动,并实现振幅调节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1