一种海生物监测系统和测量船的制作方法
1.本实用新型涉及海洋环境工程与装备技术领域,尤其涉及一种海生物监测系统和测量船。
背景技术:
2.从海洋取水具有水量充沛的优点,因此,电力、化工、冶金等需水量大的行业经常采用从海洋直接取水用于生产工艺,例如,电力行业在作业时,可以将海洋取水作为冷却用水。因全球变暖、水体富营养化和物种迁移等因素,近岸海域的海生物数量增多。一般而言,取水设施的粗细两道格栅的栅距大致为200mm和50mm,个体最大尺寸在50mm以下海生物可以随水流来到取水装置的过滤设施,而海生物的阻塞量可能超过过滤设施的清理能力,滤网前后水位差超过限值,取水工作可能因海生物的入侵而停止。
3.在海生物尚未到达取水口之前,若在来水路线中提前发现海生物的异常增加,可以提前清理过滤设施,做好人工打捞等应急准备工作,避免因海生物阻塞导致取水设施停运。为了预知海生物入侵的信息,目前主要采用水下机器人,设置在取水口前端的拦污网附近,利用水下机器人自身携带的摄像和声呐设备识别并发送水下影像信息。为防止被水流带走,水下机器人一般需要固定在拦污网立柱上,水下机器人只能在狭小的范围采集图像。另外,还可以采用在水下来回巡游的水下机器人进行海生物的监测和预警,因水下机器人的自身重量难以与水下风浪抗衡,不利天气会严重影响水下机器人摄像和声呐的工作效果,在大风浪或浑浊水质下基本失去监测能力。可见,现有技术中海生物监测的效果较差。
技术实现要素:
4.本实用新型实施例提供一种海生物监测系统和测量船,以解决海生物监测的效果较差的问题。
5.第一方面,本实用新型实施例提供一种海生物监测系统,包括船体、取样机构、第一通气管、第一固定机构、动力机构、过滤机构和数据存储设备,所述船体的底部包括多个固定孔和出水管孔,所述取样机构包括取样管、抽水泵和水泵出水管,所述过滤机构包括滤网、第二通气管、排水管和摄像装置,其中:
6.所述取样管和所述抽水泵设置于所述船体外部,所述取样管和所述抽水泵连接,所述抽水泵通过所述水泵出水管以及所述出水管孔与所述过滤机构连接,所述抽水泵通过所述第一固定机构以及所述多个固定孔的第一固定孔与所述船体连接;
7.所述摄像装置与所述数据存储设备连接;
8.所述动力机构与所述取样机构的抽水泵连接。
9.可选的,所述动力机构包括油箱,所述油箱包括相互连通的第一油箱和第二油箱,其中:
10.所述第一油箱通过所述多个固定孔的第二固定孔与所述船体的底部连接;
11.所述第二油箱通过所述多个固定孔的第三固定孔与所述船体的底部连接;
12.所述第一油箱和所述第二油箱分别设置于所述船体的底部中间位置的两端。
13.可选的,所述抽水泵为包括潜水泵和潜水电机的一体结构,所述潜水电机设置有吊耳,所述第一固定机构设置有吊钩,所述抽水泵通过所述吊耳以及所述吊钩与所述船体连接。
14.可选的,所述第一固定机构包括固定钢板、固定螺栓、圆钢紧箍和角钢,所述固定钢板包括电机固定孔和船体固定孔,其中:
15.所述固定钢板设置于所述船体的外部,所述固定钢板通过所述船体固定孔与所述船体连接;
16.所述圆钢紧箍与所述抽水泵相适配,所述圆钢紧箍通过所述角钢与所述抽水泵固定连接;
17.所述角钢通过所述固定螺栓以及所述电机固定孔与所述固定钢板连接。
18.可选的,所述取样管设置有多个分别位于不同水平线的吸水口。
19.可选的,所述第一通气管、所述第二通气管和所述排水管分别通过弯管设置有水平向下的出口;
20.其中,所述第一通气管、所述第二通气管和所述排水管的出口设置有拍门。
21.可选的,所述第一通气管、所述第二通气管和所述排水管的出口为金属材料的管道,所述拍门为金属重质拍门。
22.可选的,所述系统还包括水下机器人,所述水下机器人包括信息采集装置和数据线,所述水下机器人通过所述数据线与所述船体连接,所述水下机器人的信息采集装置通过所述数据线与所述数据存储设备连接。
23.可选的,所述过滤机构还包括照明装置。
24.第二方面,本实用新型实施例提供一种测量船,包括上述的海生物监测系统。
25.本实用新型实施例中,通过取样机构的取样管和抽水泵抽取海水传输至过滤机构,过滤机构的摄像装置可以对滤网上的海生物进行实时拍摄,并将拍摄数据传输至数据存储设备,因动力机构可以提供海生物监测系统在海上的移动动力,海生物监测系统可以在海上移动,监测的海域面积较大,在海面的不利天气中,可以抽取海水对海生物的数量进行取样检测,数据存储设备可以将拍摄数据传输至岸上的数据处理中心进行海生物的数量分析,从而可以提高海生物监测的效果。
附图说明
26.图1是本实用新型实施例提供的一种海生物监测系统的结构图之一;
27.图2是本实用新型实施例提供的一种海生物监测系统的结构图之二;
28.图3是本实用新型实施例提供的一种海生物监测系统的结构图之三;
29.图4是本实用新型实施例提供的一种海生物监测系统的结构图之四;
30.图5是本实用新型实施例提供的一种海生物监测系统的结构图之五;
31.图6是本实用新型实施例提供的一种海生物监测系统的结构图之六;
32.图7是本实用新型实施例提供的一种海生物监测系统的结构图之七;
33.图8是本实用新型实施例提供的一种海生物监测系统的结构图之八;
34.图9是本实用新型实施例提供的一种海生物监测系统的结构图之九。
具体实施方式
35.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
36.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”所区别的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。
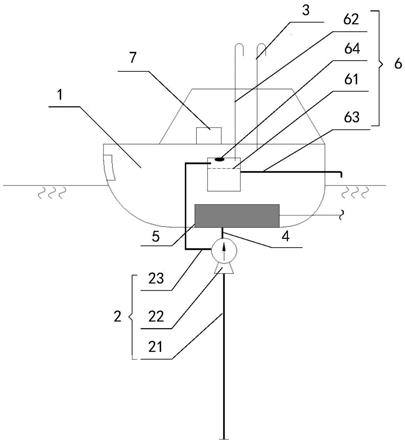
37.请参见图1,图1是本实用新型实施例提供的一种海生物监测系统的结构图之一,如图1所示,海生物监测系统包括船体1、取样机构2、第一通气管 3、第一固定机构4、动力机构5、过滤机构6和数据存储设备7,船体1的底部包括多个固定孔11和出水管孔12,取样机构2包括取样管21、抽水泵22 和水泵出水管23,过滤机构6包括滤网61、第二通气管62、排水管63和摄像装置64,其中:
38.取样管21和抽水泵22设置于船体1外部,取样管21和抽水泵22连接,抽水泵22通过水泵出水管23以及出水管孔12与过滤机构6连接,抽水泵22 通过第一固定机构4以及多个固定孔11的第一固定孔111与船体1连接;
39.摄像装置64与数据存储设备7连接;
40.动力机构5与取样机构2的抽水泵22连接。
41.在该实施方式中,海生物监测系统需要进行海水取样、海水过滤和摄像等工作,因此,海生物监测系统需要安装在一个可以浮在海面上的装置内部,考虑到海面的特殊环境,装置容易倾翻,因此该装置可能需要相对封闭,在发生倾翻时,不会影响内部的海生物监测系统的工作。本技术以安装有海生物监测系统的装置测量船为例进行说明。
42.其中,取样机构2可以用于对海生物监测系统所处区域的海水进行取样。取样机构2的取样管21和抽水泵22安装在船体1的外部,抽水泵22可以抽取海水原样,通过取样管21和水泵出水管23将海水传输至过滤机构6,动力机构5与取样机构2的抽水泵22连接,抽水泵22的动力可以由动力机构5 提供。因抽水泵22、取样管21和部分水泵出水管23一般浸泡在海水中,所以可以采用耐腐蚀的材料。抽水泵可以采用螺旋离心潜水泵,螺旋离心潜水泵对活体生物的损伤最小,没有搅拌或切割部件,海水和海生物顺着螺旋式流道,被快速旋转的离心力旋入,经水泵出水管23到达过滤机构6。抽水泵22固定在测量船的下方,抽水泵22在运行时淹没在海水中,具有足够的净吸水压,不会发生吸水困难或汽蚀等问题。在对海水的取样过程中,海生物在取样管 21内的停留时间越短,海生物的活性更好,对取样结果的准确度的影响越低,因此,水泵出水管23的长度不宜太长。海生物在水泵出水管23的管道内的停留时间较短,到达过滤机构6的滤网61上的海生物的活性可以与在大海中的几乎没有区别。
43.如图2所示,过滤机构6包括滤网61、第二通气管62、排水管63和摄像装置64。水泵出水管23的出水端高于排水管63,水泵出水管23将海水运输至过滤机构6的一侧的上端,滤网61将海水过滤后,海水再从过滤机构6的一侧的下端的排水管63流出至大海。为满足重力
排放条件,滤网61和排水管 63的设置高度必须在海平线之上。为满足海生物监测系统在海面上的平稳性,设置于海平线以上的设备和部件可以选用轻质材料,减轻船体1重心上部的荷载,因此,过滤网61以及排水管63可以采用轻质塑料材料,并可以通过采取支吊架将过滤机构6固定。
44.另外,滤网61的有效网孔面积除满足过流能力外,还需要考虑达到致灾标准时截留的海生物所占用的过流面积,因不同海域的致灾海生物的种类不同,用于过滤海水的滤网61的孔径也可能存在区别。在海水的过滤过程中,滤网 61淹没可能影响截留在滤网61上的海生物的拍摄和识别,所以,为保证在过滤机构6内,海水能够顺利的流入流出,可以通过限制过滤机构6的水流速度、提高排水管63的排水能力等措施,保证滤网61在截留取样海水中的固体物达致灾浓度后还具有足够的过水能力。过滤机构6的进水及其排水的时间间隔可以由程序自动确定,岸上数据处理中心可以根据测量船发送的摄像数据判断程序是否需要调整。另外,过滤机构6是一个相对封闭的机构,为避免过滤机构6内产生负压影响过流能力,可以设置第二通气管62直通测量船的舱外,且第二通气管62与底舱的第一通气管3独立设置。
45.同时,如图3所示,通过取样管21、抽水泵22和水泵出水管23,海水传输到过滤机构6,摄像装置64拍摄截留在滤网61上的海生物,将拍摄数据传输给数据存储设备7,数据存储设备7将拍摄数据无线传输给岸上的数据处理中心8。岸上的数据处理中心8可以对摄像数据进行计算和智能识别,可以获取海水中的海生物种类、数量及巡监路线沿途各点的海生物分布等相关信息,当出现异常情况时,可以发出报警信息。为了更好地观察分析海生物的数量,摄像装置64可以采用镜头可自动调节的摄像头,为获取拍摄时的合理的灯光,摄像装置64可以自带闪光灯功能,也可以设置一个照明灯65用于摄像。数据存储设备7还可以将测量船的实时定位信息上传至岸上的数据处理中心,根据报警信息和测量船的定位信息,可以提前发现在外海领域海生物的异常增加,做好人工打捞海生物等应急准备工作,以避免因紧急阻塞导致的取水设施停运的事件发生。上述海水取样、过滤、拍摄和数据传输操作和设备的控制都可以采用网络自动控制,在海面的不利天气中,可以将拍摄数据传输至岸上的数据处理中心,不会影响海生物的监测。
46.需要说明的是,测量船的上部主要放置控制设备及数据存储设备7,控制设备及数据存储设备7均以轻质材料为主,所以,船测量船的上部的荷重比较小。抽水泵22、水泵出水管23的舱外部分采用耐海水腐蚀的金属材料制造,测量船的底部安装有动力机构5及其油箱,自重较大。上述设备的重力布置及材料选择是按照不倒翁式的结构设计要求,保证测量船的重心低于船体1吃水线。在测量船遇到大风浪发生倾斜的情况下,测量船的重心被抬高,重力与船体1在水面新的支撑点之间产生的力矩可以迫使船体1恢复到原来垂直的状态。测量船整体采用密封设计,可以承受设计频率浪高的袭击和破坏。因测量船内部的空气体积可以保持测量船的浮力,在发生侧翻的情况下,测量船也会在短时间内自动扶正,可以满足无人巡航的要求。
47.本实用新型实施例中,通过取样机构2的取样管21和抽水泵22抽取海水传输至过滤机构6,过滤机构6的摄像装置64可以对滤网61上的海生物进行实时拍摄,并将拍摄数据传输至数据储存设备7,因动力机构5可以提供海生物监测系统在海上的移动动力,海生物监测系统可以在海上移动,监测的海域面积较大,在海面的不利天气中,可以抽取海水对海
生物的数量进行取样检测,数据存储设备7可以将拍摄数据传输至岸上的数据处理中心进行海生物的数量分析,从而可以提高海生物监测的效果。
48.作为一种可选的实施方式,动力机构5包括油箱,油箱包括相互连通的第一油箱和第二油箱,其中:
49.第一油箱通过多个固定孔11的第二固定孔112与船体1的底部连接;
50.第二油箱通过多个固定孔11的第三固定孔113与船体1的底部连接;
51.第一油箱和第二油箱分别设置于船体1的底部中间位置的两端。
52.测量船在海面上的移动需要动力机构5提供动力,动力机构5一般包括发动机、发电机和油箱。为保证测量船在海面上的平稳性,发动机、发电机和油箱一般安装于船体1的底部。如图4所示,动力机构5包括第一油箱、第二油箱、发电机53和发动机54,第一油箱和第二油箱分别通过多个固定孔11的第二固定孔112、第三固定孔113与船体1的底部固定连接。船体1的底部除第二固定孔112、第三固定孔113作为油箱固定孔外,还有多个固定孔11的第一固定孔111和水泵的出水管孔12,第一固定孔111用于抽水泵22与船体的固定连接。考虑其它设备的重力对测量船稳定性的影响,可以通过模拟计算并根据动、静平衡试验的结果,可以确定保持船体1整体稳定的最佳间距,即抽水泵22安装位置与船头的间距l1、抽水泵22安装位置与油箱安装位置的间距l2以及油箱安装位置与发电机安装位置的间距l3,还可以确定两个油箱在船体1底部中间位置的两端的相对位置。确定好第一油箱和第二油箱在船体 1底部的安装位置后,再将第一油箱和第二油箱固定在船体1的底部。
53.在舱底中间位置左右各放置第一油箱和第二油箱,考虑到在取水口的外海区域巡逻路线较长,耗油量较大,第一油箱和第二油箱需要保持平衡。第一油箱和第二油箱的体积相同,两油箱底部的加油管相互连通,第一油箱和第二油箱内的油的液位可以随时保持相等。因油箱位于船底的中间位置,测量船内油箱随时处于均等状态,可以保持船体1在海面航行的稳定性。
54.该实施方式中,由于第一油箱和第二油箱固定于船体1的底部中间位置的两端,且第一油箱和第二油箱相互连通保持油箱内的油的液位相等,第一油箱和第二油箱的重量随时相等,可以提高船体1在海面航行的稳定性。
55.可选的,抽水泵22为包括潜水泵221和潜水电机222的一体结构,潜水电机222设置有吊耳,第一固定机构4设置有吊钩,抽水泵22通过吊耳以及吊钩与船体1连接。
56.需要说明的是,为保证测量船的相对密封性,抽水泵22的出口与水泵出水管23可以通过法兰连接,连接处的材料可以采用耐腐蚀材料。水泵出水管 23通过出水管孔12穿入测量船内部,出水管孔12周围采用密封圈,并采取耐腐蚀弹性垫片紧固措施以及阻水密封措施。
57.其中,如图5所示,抽水泵22为包括潜水泵221和潜水电机222的一体结构,电机顶有吊耳,第一固定机构4设置有吊钩,抽水泵22通过吊耳以及吊钩与船体1连接。第一固定机构4可以为固定螺栓,固定螺栓通过多个固定孔11中的水泵固定孔与船体1的底部固定连接。水泵固定孔的内外均采用密封圈,并采取耐腐蚀弹性垫片紧固措施以及阻水密封措施,以防止海水进入船体1。一般而言,潜水泵221和电机由绳索悬吊在吊钩上,考虑潜水泵221全部淹没在舱底的水中,受海浪的冲击及与各方受力复杂,吊绳在两头需系紧系牢。在需要对抽水泵22进行拆卸时,可以直接通过断开绳索将抽水泵22和船体1分离。
58.一般而言,抽水泵22的潜水泵221和潜水电机222采用采用能够承受海水腐蚀的重质材料,相应的连接和紧固件也以重质耐腐蚀材料为主。因抽水泵 22设置在船底的外部,可以进一步降低测量船整体的重心,提高测量船的稳定性。
59.该实施方式中,由于抽水泵22为包括潜水泵221和潜水电机222的一体结构,潜水电机222设置有吊耳,第一固定机构4设置有吊钩,抽水泵22通过吊耳以及吊钩与船体1连接,该连接方式易于拆卸和安装,从而可以提高抽水泵22安装和拆卸的效率。
60.可选的,第一固定机构4包括固定钢板41、固定螺栓42、圆钢紧箍43 和角钢44,固定钢板41包括电机固定孔411和船体固定孔412,其中:
61.固定钢板41设置于船体1的外部,固定钢板41通过船体固定孔412与船体1连接;
62.圆钢紧箍43与抽水泵22相适配,圆钢紧箍43通过角钢44与抽水泵22 固定连接;
63.角钢44通过固定螺栓42以及电机固定孔411与固定钢板41连接。
64.需要说明的是,在抽水泵22与船体1通过吊耳和吊钩连接的情况下,抽水泵22与水泵出水管23之间的固定连接的作用力主要通过法兰连接提供,在大风等不利天气中,抽水泵22容易晃动,抽水泵22与水泵出水管23之间的固定连接容易受到破坏。因此,可以对抽水泵22进行进一步稳固。
65.抽水泵22通过第一固定机构4与船体1连接,第一固定机构4包括固定钢板41、固定螺栓42、圆钢紧箍43和角钢44,固定钢板41包括电机固定孔 411和船体固定孔412。固定钢板41可以通过固定螺栓42和船体固定孔412 与船体1连接,抽水泵22置于圆钢紧箍43内,圆钢紧箍43与角钢44固定连接,角钢44再通过固定螺栓42以及电机固定孔411与固定钢板41连接。如此,圆钢紧箍43、角钢44和固定螺栓42可以形成抽水泵22的固定支架,以提高抽水泵22的稳定性。
66.如图5所示,电机外壳为金属结构,圆钢紧箍43、角钢44和固定螺栓42 形成抽水泵22的左右固定支架,可以将抽水泵22的荷载经固定钢板41传给测量船的船底。以左侧支架为例,潜水电机222置于圆钢紧箍内,圆钢紧箍开口向左,圆钢紧箍两端的螺柱穿过角钢44的竖直边两端的螺栓孔,通过螺母进行固定连接。进一步的,通过电机固定螺栓42的双头螺栓和螺母将角钢44 的水平边与固定钢板41的左侧电机固定孔411固定,左侧电机固定孔411为与双头螺栓相适配的螺栓孔。这样,通过圆钢紧箍、角钢44和双头螺栓可以将抽水泵22固定在船底外部的固定钢板41上。右侧支架的固定方式与左侧支架一致,但左侧支架和右侧支架的圆钢紧箍固定在潜水电机222的不同高度上,相应的,左侧支架和右侧支架对应的电机固定螺栓42的长度不一致。同时,为了避免圆钢紧箍对电机外壳产生直接作用力,电机外壳与圆钢紧箍的接触部位设置有柔性保护圈。
67.其中,固定钢板41包括电机固定孔411和船体固定孔412,如图7所示,固定钢板41包括两个电机固定孔411和一个船体固定孔412,电机固定孔411 用于角钢44与固定钢板41的固定,船体固定孔412用于抽水泵22与船体1 的固定连接。其中,电机固定孔411为螺栓孔,位于固定钢板41两侧,船体固定孔412为与船体1固定螺栓42孔,位于固定钢板41中间。固定钢板41 中电机固定孔411和船体固定孔412的数量及位置可以根据不同应用场景进行设定,在此不做限制。
68.另外,角钢44也可以称角铁,是两边互相垂直成角形的长条钢材。如图 8所示,角钢44的水平长条边设置有上边螺栓孔,用于角钢44与固定钢板41 的连接,角钢44的竖直长
条边设置有两个下边螺栓孔,用于角钢44与圆钢紧箍的固定连接。
69.该实施方式中,由于第一固定机构4包括固定钢板41、固定螺栓42、圆钢紧箍43和角钢44,通过圆钢紧箍、角钢44和双头螺栓可以将抽水泵22固定在船底外部的固定钢板41上,可以将抽水泵22的荷载经固定钢板41传给测量船的船底,从而可以提高抽水泵22与水泵出水管23的固定连接的稳定性。
70.可选的,取样管21设置有多个分别位于不同水平线的吸水口。
71.通过位于不同水平线的吸水口,可以对离海面不同深度的海水进行取样。如图9所示,为满足在不同水深的水层取水的要求,取样管21设置有上、中、下三个吸水口,吸水口的开口面积考虑不同水层阻力的差别,以实现三个吸水口均匀、等流量取水。另外,不同水平线的吸水口可以设置不同的开口方向,例如,三个吸水口的方向设置为具有120度的间隔,这样,可以对取样管21 周围多个方向的海水进行取样。因取样管21较长,可以采用轻质塑料类材料,取样管21与潜水泵221吸入口采用法兰连接,可以减小接口受力。
72.该实施方式中,取样管21设置有多个分别位于不同水平线的吸水口,可以对不同水深的海水层进行取水,海水的取样更符合实际情况,从而可以提高海生物监测的准确性。
73.可选的,第一通气管3、第二通气管62和排水管63分别通过弯管设置有水平向下的出口;
74.其中,第一通气管3、第二通气管62和排水管63的出口设置有拍门9。
75.第一通气管3、第二通气管62和排水管63分别通过弯管设置有水平向下的出口,这样,通过取样海水自身的重力,取样海水可以流入过滤机构6,再经过滤机构6流入大海。另外,第一通气管3、第二通气管62和排水管63的出口设置有拍门9,拍门9一般安装于排水管63的尾端,是具有防止外水倒灌功能的逆止阀。在正常状态下,拍门9因自重向下而保持打开状态,船体1 发生倾斜甚至侧翻时,拍门9在重力作用下可以自动关闭,海水不会进入测量船内部。
76.该实施方式中,由于第一通气管3、第二通气管62和排水管63分别通过弯管设置有水平向下的出口,且出口处设置有拍门9,在船体1发生倾斜或侧翻时,拍门9在重力作用下可以自动关闭,测量船可以形成密封结构,从而海水不会进入测量船内部。
77.可选的,第一通气管3、第二通气管62和排水管63的出口为金属材料的管道,拍门9为金属重质拍门。
78.其中,金属重质拍门为采用金属材料,具有较大的重量的拍门。在船体1 发生倾斜时,金属重质拍门可以在自身重力作用下,自动关闭。拍门为金属重质拍门,相对应的,第一通气管3、第二通气管62和排水管63的出口也采用金属材料的管道,以达到拍门关闭时的测量船的良好封闭效果。
79.另外,金属材料的拍门,本身强度高,刚性强,使用时间较长,无需频繁更换。
80.该实施方式中,由于第一通气管3、第二通气管62排水管63的出口为金属材料的管道,拍门9为金属重质拍门,金属重质拍门具有较大重量,在船体 1发生倾斜时,可以在自身重力作用下,自动关闭,从而可以提高测量船的封闭效果。
81.可选的,系统还包括水下机器人,水下机器人包括信息采集装置和数据线,水下机器人通过数据线与船体1连接,水下机器人的信息采集装置通过数据线与数据存储设备连接。
82.在正常天气状态下,例如海面风力小于4级,可以通过水下机器人对海水中的海生物进行监测。测量船拖曳水下机器人,可以增加水下机器人的可视范围或扫描范围。水下机器人包括信息采集装置和数据线,信息采集装置可以获取海水中的影像数据和声呐数据,测量船可以通过数据线拖曳水下机器人,水下机器人可以通过数据线将把采集到的影像数据和声呐数据传输给测量船上的数据存储设备,数据存储设备再无线发送给岸上数据处理中心8。
83.一般而言,在测量船的前端、吃水线以上位置可以设置测量设备下水孔,测量船的前端有一定的空置区域,该区域用于操作人员做准备工作及监测结束回收水下机器人。另外,水下机器人的动力可以由水下机器人配套的蓄电池或动力机构5提供。
84.该实施方式中,海生物监测系统还包括水下机器人,水下机器人可以通过数据线将把信息采集装置采集到的影像数据和声呐数据传输给测量船,测量船拖曳水下机器人进行海生物的监测,可以提高水下机器人在静置状态下采集图像的范围。
85.可选的,过滤机构6还包括照明装置65。
86.为获取清晰的影像数据,可以设置照明装置65,配合摄像装置64对滤网 61上的海生物进行拍照。照明装置65一般设置于过滤机构6的滤网61的上部,照明装置65和摄像装置64配合使用,可以避免背景色对摄像产生干扰。另外,为了方便影像数据的分析,滤网61宜选用浅色或无色。
87.该实施方式中,由于过滤机构6还包括照明装置65,可以和摄像装置64 配合使用,从而可以提高获取摄像的清晰度。
88.本实用新型实施例还提供了一种测量船,包括上述的海生物监测系统。岸上的数据处理中心发出报警信息后,或测量船按照既定的巡监路线完成监测未发现海生物异常情况时,测量船可以返回岸上进行维护保养。
89.由于本实施例提供的测量船包括上述海生物监测系统,因而具有与上述海生物监测系统相同的有益技术效果,为避免重复,这里不再赘述。
90.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1