一种海底目标物辅助捕获装置及操作方法与流程
1.本发明涉及海底目标物捕获装置技术领域,尤其是一种用于海底高价值沉骸等打捞海底目标物辅助捕获装置及操作方法。
背景技术:
2.随着各国海洋战略发展逐步延伸至深海大洋,海底空间也越发成为支撑海洋战略发展的基础空间,同时海上考古也成为海上施工作业领域的重要方向。海底空间的利用包含在海底建设、维护各类水下生产、探测、通信设施及打捞高价值沉骸等施工作业,上述施工作业将主要利用重载起吊设施及作业级rov等工具实现。
3.然而,现有的长期近海底及海底重载作业主要依托于缆控无人潜器,该类潜器通过脐带缆与母船连接,潜器本体携带声、光等传感器用,母船上操作人员通过上述传感器信号搜寻、识别、定位海底载荷,部分潜器还具备自动搜寻、识别、定位功能。但依靠传感器的搜寻、定位及识别对传感器本身性能及算法要求很高,且海底复杂环境及目标物的不确定性加大了上述作业难度。更为困难的是,当完成对目标物的定位后,潜器航行至目标物位置则完全依赖潜器机动性能及操作人员熟练程度,尤其是在重载起吊作业时,潜器往往本身呈负浮力状态,操控难度很大。
4.因此上述近海底及海底的重载作业存在定位难度大,抵达作业目标物难度大等特点,严重影响作业效率及经济性。同时也限制了海底空间的利用进程。
技术实现要素:
5.本技术人针对上述现有生产技术中的缺点,提供一种海底目标物辅助捕获装置及操作方法,从而可以加装在现有作业潜器上的辅助捕获装置,可以在潜器识别到目标物后,在接近目标物位置辅助潜器快速捕获目标物,降低潜器捕获目标物难度并提高经济性。
6.本发明所采用的技术方案如下:
7.一种海底目标物辅助捕获装置,包括安装基座,所述安装基座与缆控潜器固定,所述安装基座上安装有卷筒,所述卷筒的一端为卷筒驱动单元,所述卷筒上绕有单层的缆绳,缆绳的一端固定在卷筒的内侧,缆绳的另一端伸出至外部;所述卷筒的底部固定有导轮驱动单元,所述导轮驱动单元的输出端设置有对应的一号导轮和二号导轮,缆绳从一号导轮和二号导轮之间穿过并连接锚具组合体。
8.其进一步技术方案在于:
9.所述导轮驱动单元的结构为:包括底板,底板连接卷筒,底板上固定有电机,电机的输出端安装有主动齿轮,所述主动齿轮与从动齿轮啮合,所述底板上固定有立板,主动齿轮和从动齿轮的转轴均穿过立板,并在立板另一侧安装与从动齿轮同轴的一号导轮,与主动齿轮同轴的小齿轮,小齿轮设置有三个,并在第三个小齿轮上同轴安装二号导轮。
10.所述导轮驱动单元焊接在卷筒的底部。
11.所述导轮驱动单元通过紧固件锁紧在卷筒的底部。
12.所述卷筒驱动单元和导轮驱动单元均采用水下电机作为驱动源。
13.所述锚具组合体的安装结构为:包括抓盘,所述抓盘上表面的中部与缆绳固定,抓盘的下表面中部固定有磁性锚具,位于磁性锚具外围的抓盘上安装有支柱,支柱的底部安装有吸盘,所述支柱上套有弹簧。
14.所述弹簧的顶部与抓盘固定,弹簧的底部与吸盘固定。
15.所述吸盘的底部设置有内凹结构,吸盘的外圆周面设置有锯齿结构。
16.一种海底目标物辅助捕获装置的操作方法,包括如下操作步骤:
17.第一步:将辅助捕获装置通过安装基座固定在缆控潜器的底部;
18.第二步:当缆控潜器通过机载传感器完成对水下目标物的初步识别定位后,航行至光学传感器对目标物可见的距离;
19.第三步:缆控潜器航行到位后悬停;
20.第四步:启动导轮驱动单元,驱动两个导轮对缆绳进行加速,达到缆绳末端锚具组合体高速射向目标物目的;
21.第五步:当锚具组合体到达目标物后,对目标物进行捕捉;
22.第六步:当锚具组合体捕捉到目标物后,启动卷筒驱动单元收揽,将缆控潜器拉到目标物捕获点,此时缆控潜器推进器不工作,属于被动航行状态。
23.本发明的有益效果如下:
24.本发明结构紧凑、合理,操作方便,通过卷筒、导轮、以及各自的驱动单元、缆绳、吸盘等部件之间的互相配合工作,并按照操作方法实施,可以辅助近底作业潜器快速、高效地捕获目标物,从而改善现有模式下,潜器精确定位目标物难度大,航行捕获目标物操纵难度大,对操作人员操作经验要求高的问题。
25.本发明海底目标物辅助捕获装置简单、可靠,通过该装置的加装可显著提高现有潜器执行此类作业时的效率,进而提高经济性,具备较大应用潜力。
附图说明
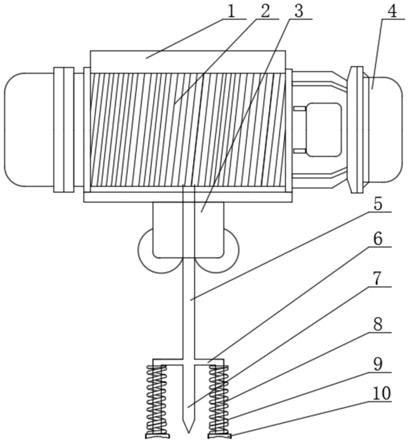
26.图1为本发明的结构示意图。
27.图2为本发明导轮驱动单元的结构示意图。
28.图3为本发明辅助捕获装置搭载在作业潜器的结构示意图。
29.图4为本发明辅助捕获装置捕获目标物的结构示意图。
30.图5为本发明作业潜器捕获目标物的结构示意图。
31.其中:1、安装基座;2、卷筒;3、导轮驱动单元;4、卷筒驱动单元;5、缆绳;6、抓盘;7、磁性锚具;8、支柱;9、弹簧;10、吸盘;11、缆控潜器;12、辅助捕获装置;13、抓子;14、目标物;15、海底;
32.301、底板;302、从动齿轮;303、电机;304、一号导轮;305、主动齿轮;306、小齿轮;307、立板;308、二号导轮。
具体实施方式
33.下面结合附图,说明本发明的具体实施方式。
34.如图1-图5所示,本实施例的海底目标物辅助捕获装置,包括安装基座1,安装基座
1与缆控潜器11固定,安装基座1上安装有卷筒2,卷筒2的一端为卷筒驱动单元4,卷筒2上绕有单层的缆绳5,缆绳5的一端固定在卷筒2的内侧,缆绳5的另一端伸出至外部;卷筒2的底部固定有导轮驱动单元3,导轮驱动单元3的输出端设置有对应的一号导轮304和二号导轮308,缆绳5从一号导轮304和二号导轮308之间穿过并连接锚具组合体。
35.导轮驱动单元3的结构为:包括底板301,底板301连接卷筒2,底板301上固定有电机303,电机303的输出端安装有主动齿轮305,主动齿轮305与从动齿轮302啮合,底板301上固定有立板307,主动齿轮305和从动齿轮302的转轴均穿过立板307,并在立板307另一侧安装与从动齿轮302同轴的一号导轮304,与主动齿轮305同轴的小齿轮306,小齿轮306设置有三个,并在第三个小齿轮306上同轴安装二号导轮308。
36.导轮驱动单元3焊接在卷筒2的底部。
37.导轮驱动单元3通过紧固件锁紧在卷筒2的底部。
38.卷筒驱动单元4和导轮驱动单元3均采用水下电机作为驱动源。
39.锚具组合体的安装结构为:包括抓盘6,抓盘6上表面的中部与缆绳5固定,抓盘6的下表面中部固定有磁性锚具7,位于磁性锚具7外围的抓盘6上安装有支柱8,支柱8的底部安装有吸盘10,支柱8上套有弹簧9。
40.弹簧9的顶部与抓盘6固定,弹簧9的底部与吸盘10固定。
41.吸盘10的底部设置有内凹结构,吸盘10的外圆周面设置有锯齿结构。
42.本实施例的海底目标物辅助捕获装置的操作方法,包括如下操作步骤:
43.第一步:将辅助捕获装置12通过安装基座1固定在缆控潜器11的底部;
44.第二步:当缆控潜器11通过机载传感器完成对水下目标物14的初步识别定位后,航行至光学传感器对目标物14可见的距离;
45.第三步:缆控潜器11航行到位后悬停;
46.第四步:启动导轮驱动单元3,驱动两个导轮对缆绳5进行加速,达到缆绳5末端锚具组合体高速射向目标物14目的;
47.第五步:当锚具组合体到达目标物14后,对目标物14进行捕捉;
48.第六步:当锚具组合体捕捉到目标物14后,启动卷筒驱动单元4收揽,将缆控潜器11拉到目标物14捕获点,此时缆控潜器11推进器不工作,属于被动航行状态。
49.本发明所述的海底目标物辅助捕获装置12的具体结构和功能如下:
50.主要包括卷筒2、卷筒驱动单元4、缆绳5、导轮、导轮驱动单元3、磁性锚具7、吸盘10及弹簧9及安装基座1等。
51.其中卷筒2是本装置主体部分,卷筒驱动单元4集成在卷筒2中,缆绳5单层缠绕在卷筒2上,缆绳5一端固定在卷筒2的内侧,导轮驱动单元3与卷筒2通过焊接或螺栓连接,两个导轮通过轴承与导轮驱动单元3连接。
52.其中缆绳5一端连接磁性锚具7,磁性锚具7穿过抓盘6,磁性锚具7外围的抓盘6上设置支柱8,支柱8上套有弹簧9,支柱8的底部设置有吸盘10。
53.其中本装置中卷筒驱动单元4与导轮驱动单元3均采用水下电机作为驱动源,导轮驱动单元3为高速电机。
54.其中本装置的主体通过安装基座1模块化安装在缆控潜器11上,并通过缆控潜器11进行控制及供电。
55.导轮驱动单元3的具体结构和原理为:
56.包括底板301,底板301用于导轮驱动单元3与卷筒2的连接,同时也为电机303及各齿轮提供安装接口;电机303通过螺栓与底板301连接,各齿轮通过轴、轴承及轴承基座与底板301和立板307连接。
57.两个导轮分别通过轴与齿轮组连接,同时电机303通过轴与齿轮组连接,通过两组齿轮组传动分别带动导轮对转,两个导轮之间夹持缆绳5,进而完成对缆绳5的加速工作。
58.实际工作过程中:
59.如图3所示的是水下目标物的打捞典型作业场景,本发明所述的辅助捕获装置12通过安装基座1集成在缆控潜器11的底部,当缆控潜器11通过机载传感器完成对水下海底15上的目标物14的初步识别定位后,航行至光学传感器对目标物14可见的距离。
60.缆控潜器11航行到位后悬停,启动导轮驱动单元3,驱动两个导轮对缆绳5进行加速,达到缆绳5末端磁性锚具7及其他组合体高速射向目标物目的。
61.当锚具组合体到达目标物14后,因为磁性锚具7本身具备磁性,同时高速运动可射入目标物14内,对于磁性及非磁性目标均可实现捕捉,而对于表面光滑目标物14,吸盘10接触目标物14表面瞬间,弹簧9挤压吸盘10,可使吸盘10与目标物14表面间形成负压而实现对目标物的捕捉,同时缆控潜器11的抓子13抓住目标物14。
62.当锚具组合体捕捉到目标物14后,启动卷筒驱动单元4收揽,将缆控潜器11拉到目标物14捕获点,此时缆控潜器11推进器不工作,属于被动航行状态。
63.当缆控潜器11到达捕获点后,启动潜器完成对目标物14的捕获。
64.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1