一种双端控制的水上无人救生艇及救生艇智能返航方法与流程
1.本发明涉及无人救生艇技术领域,尤其涉及一种双端控制的水上无人救生艇及救生艇智能返航方法。
背景技术:
2.近年来,自然灾害频繁发生,尤其是在台风季节,水灾发生的频率更高,当救援艇在执行救援任务的过程中,会从任意水域触发,再行进到特定水域执行救援任务。在救援艇行进的过程中,通常是通过操作人员进行远程遥控的方式对救援艇的行动方向进行控制。当救援地点与操控地点距离较远时,救援者看不清方向,且不能通过与被救者进行语音沟通同时交由被救者进行控制,存在容易使被救者受到二次伤害的情况,影响救援效果以及救援效率。
3.因此,现有技术存在缺陷,需要改进。
技术实现要素:
4.本发明的目的是克服现有技术的不足,提供一种双端控制的水上无人救生艇及救生艇智能返航方法。
5.本发明的技术方案如下:提供一种双端控制的水上无人救生艇,包括:救生艇主体、设置于所述救生艇主体上的主控系统、设置于所述救生艇主体底部的若干推进器、以及与所述主控系统通过无线模块进行远程连接的遥控器,所述主控系统包括:电源模块、主mcu模块、控制模块、飞控系统、以及gps模块,所述主mcu与控制系统连接,所述主mcu模块连接有飞控接口,所述主mcu通过飞控接口与飞控系统连接,所述飞控系统与gps模块连接,所述飞控系统包括内存单元。
6.进一步地,所述主控系统及遥控器均设置有对讲模块。
7.进一步地,所述遥控器与主控系统之间的无线电波收发频段为2.4ghz。
8.进一步地,所述主mcu模块采用的芯片型号为stm32f072c8t6。
9.进一步地,所述飞控系统连接有惯性处理单元。
10.进一步地,所述电源模块包括:降压电路模块、dc-dc模块、以及飞控供电模块,所述降压电路模块与dc-dc模块以及飞控供电模块连接,所述dc-dc模块为主mcu模块供电,所述飞控供电模块为飞控系统供电。
11.本发明还提供一种救生艇智能返航方法,包括如下步骤:
12.步骤1:当救生艇启动后,gps模块开始进行定位;
13.步骤2:将启动的位置定位home点,并输出位置导航数据到飞控系统;
14.步骤3:将救生艇投放于任意水域中,通过遥控器将救生艇驱往被救者所在位置;
15.步骤4:在救生艇行进的过程中,gps模块持续记录路径节点,并实时输出位置导航数据到飞控系统;
16.步骤5:飞控系统获取导航数据后,将home点及路径节点记录存储到内存单元中,
实时记录救生艇的行进路径;
17.步骤6:当救生艇与遥控器保持正常连接状态,且操作人员可观察到救生艇的行进情况时,由操作人员对救生艇的行进进行控制,控制救生艇返航;
18.步骤7:当救生艇与遥控器保持正常连接状态,但操作人员难以观察到救生艇的行进情况时,操作人员可通过对讲模块与被救者进行沟通,并由被救者进行本机控制,控制救生艇的行进方向以进行返航;
19.步骤8:当救生艇与遥控器断开连接的异常状况超过3秒时,飞控系统自动调用内存单元中所记录保存的路径数据,并根据所保存的路径朝向所记录的home点进行原路返航。
20.进一步地,在救生艇与遥控器断开连接并进入原路返航模式的过程中,当救生艇与遥控器重新建立连接,并且在确认连接后超过10秒,飞控系统将控制权转回遥控器,并自动执行以直线路径返航home点。
21.采用上述方案,本发明通过将主mcu与控制系统以及飞控系统连接,从而满足在操作人员不能准确判断水域情况,或遥控器与救生艇的连接出现异常时,可以通过救生艇的控制系统进行本机操控,或者通过飞控系统实现智能原路返航,以此保证能够安全地将被救者救出,避免对被救者造成二次伤害或使被救者再次处于被困状态,提高救援效果及救援效率。
附图说明
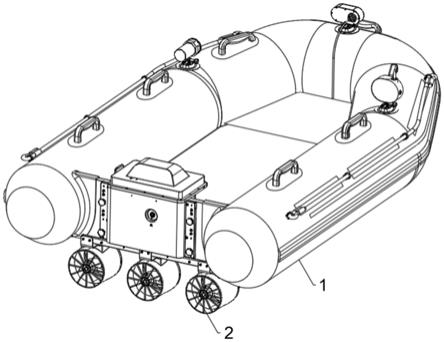
22.图1为本发明的结构示意图。
23.图2为本发明的电路模块连接示意框图。
24.图3为主mcu模块的电路连接示意图。
25.图4为飞控接口的电路连接示意图。
26.图5为dc-dc模块的电路连接示意图。
27.图6为飞控供电模块的电路连接示意图。
具体实施方式
28.以下结合附图和具体实施例,对本发明进行详细说明。
29.请参阅图1至图4,本发明提供一种双端控制的水上无人救生艇,包括:救生艇主体1、设置于所述救生艇主体1上的主控系统、设置于所述救生艇主体底部的若干推进器、以及与所述主控系统通过无线模块进行远程连接的遥控器。所述主控系统包括:电源模块、主mcu模块、控制模块、飞控系统、以及gps模块,所述主mcu与控制系统连接。所述主mcu模块连接有飞控接口。所述主mcu通过飞控接口与飞控系统连接。所述飞控系统与gps模块连接。所述飞控系统包括内存单元。控制模块、飞控系统以及遥控器输出的控制指令发送到主mcu模块中,并将控制指令发送给推进器,从而驱动推进器的工作状态,进而驱动救生艇在水面上进行执行、转弯、停止等行进动作,实现对救生艇的控制。
30.发生险情时,救援队伍将无人救生艇投放在任意水域中,并通过遥控器将救生艇驱往被救者所在的位置,为被救者提供救援。
31.当遥控器与救生艇保持正常的连接状态,且操作人员可观察到救生艇的实时行进
情况与环境情况时,由操作人员通过遥控器进行远程遥控,驱动救生艇返航。此时,控制模块失效,只能通过遥控器进行操控,避免双端同时输出指令,而导致主mcu模块无法进行指令信息的判断。
32.当遥控器与救生艇保持正常的连接状态时,当操作人员难以了解到救生艇的实时行进情况或环境情况时,可启动本机操控模式,此时遥控器操控时效,只能通过设置于救生艇上的控制模块对救生艇进行操控,从而便于被救者根据环境情况调整控制救生艇的行进方向,避免因礁石等情况导致救生艇及被救者发生意外而对被救者造成二次伤害的情况。
33.在救生艇行进的过程中,飞控系统通过gps模块实时获取路径节点数据,并存储于内存单元中,以便于在遥控器与救生艇连接异常的情况下,根据所采集的路径节点实现自动返航。在此期间,被救者可通过控制模块对行进方向进行调整,以避开海面上的礁石等物体,保证被救者的安全。
34.所述主控系统及遥控器均设置有对讲模块。当启动本机操控模式时,救援人员、操作人员可通过对讲模块与被救者进行实时通话,以引导被救者通过控制模块调整救生艇的行进方向,以便于通过救生艇将被救者送往安全地区,实现对被救者的救援工作。
35.所述遥控器与主控系统之间的无线电波收发频段为2.4ghz。2.4ghz的无线电波收发频段是全世界公开通用使用的无线频段,具有较大的使用范围以及较强的抗干扰能力,从而保证遥控器与救生艇的连接状态不容易发生连接异常的情况。
36.所述主mcu模块采用的芯片型号为stm32f072c8t6。stm32f072c8t6芯片具有封装体积小、价格较低、相对于8位单片机性能更优等特点,适用于主mcu模块的使用需求。
37.所述飞控系统连接有惯性处理单元,以便于对救生艇运动中所产生的惯性进行纠偏处理。
38.请参阅图5、图6,所述电源模块包括:降压电路模块、dc-dc模块、以及飞控供电模块,所述降压电路模块与dc-dc模块以及飞控供电模块连接,所述dc-dc模块为主mcu模块供电,所述飞控供电模块为飞控系统供电。
39.本发明还提供一种救生艇智能返航方法,包括如下步骤:
40.步骤1:当救生艇启动后,gps模块开始进行定位。
41.步骤2:将启动的位置定位home点,并输出位置导航数据到飞控系统。
42.步骤3:将救生艇投放于任意水域中,通过遥控器将救生艇驱往被救者所在位置。可根据被救者发出求救信号的位置以及救生艇的gps模块的定位,操控救生艇向被救者所在位置行进。
43.步骤4:在救生艇行进的过程中,gps模块持续记录路径节点,并实时输出位置导航数据到飞控系统。
44.步骤5:飞控系统获取导航数据后,将home点及路径节点记录存储到内存单元中,实时记录救生艇的行进路径。
45.步骤6:当救生艇与遥控器保持正常连接状态,且操作人员可观察到救生艇的行进情况时,由操作人员对救生艇的行进进行控制,控制救生艇返航。此时,控制模块失效,只能通过遥控器进行操控,避免双端同时输出指令,而导致主mcu模块无法进行指令信息的判断。
46.步骤7:当救生艇与遥控器保持正常连接状态,但操作人员难以观察到救生艇的行
进情况时,操作人员可通过对讲模块与被救者进行沟通,并由被救者进行本机控制,控制救生艇的行进方向以进行返航。此时遥控器操控时效,只能通过设置于救生艇上的控制模块对救生艇进行操控,从而便于被救者根据环境情况调整控制救生艇的行进方向,避免因礁石等情况导致救生艇及被救者发生意外而对被救者造成二次伤害的情况。
47.步骤8:当救生艇与遥控器断开连接的异常状况超过3秒时,飞控系统自动调用内存单元中所记录保存的路径数据,并根据所保存的路径朝向所记录的home点进行原路返航。通过启用原路返航的功能,从而在遥控器与救生艇发生断开连接的异常状况时,确保能将救生艇上的被救者送往救援队伍所在的安全水域,以便于实现对被救者的救援工作,避免被救者陷入二次被困的情况。
48.在救生艇与遥控器断开连接并进入原路返航模式的过程中,当救生艇与遥控器重新建立连接,并且在确认连接后超过10秒,飞控系统将控制权转回遥控器,并自动执行以直线路径返航home点。在救生艇与遥控器重新连接10秒之后,将控制权转回遥控器,并自动执行直线路径返航,以免在重新连接的瞬间操作人员通过遥控器做出相应的指令与救生艇正在执行的指令产生冲突,影响救生艇对行进路径的控制。同时,避免操作人员在遥控器取回控制权之后没有及时反映,而发生救生艇因失去控制指令而停止行进等情况,避免因此造成被救者的恐慌。
49.综上所述,本发明通过将主mcu与控制系统以及飞控系统连接,从而满足在操作人员不能准确判断水域情况,或遥控器与救生艇的连接出现异常时,可以通过救生艇的控制系统进行本机操控,或者通过飞控系统实现智能原路返航,以此保证能够安全地将被救者救出,避免对被救者造成二次伤害或使被救者再次处于被困状态,提高救援效果及救援效率。
50.以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1