一种仿生牛鼻鳐机器人
该发明属于机器人技术应用领域,具体涉及到一种仿生牛鼻鳐机器人,可以应用在自然环境观测海洋生物活动、海底环境监测、海洋资源探测等,为水下研究提供新的解决方案。此外也可应用于商业、科研等其它领域。
背景技术:
1、适应各种水下复杂环境的机器人是当今机器人研究领域最为前沿的课题之一,它集机械、电子、计算机、材料、传感器、控制技术及人工智能等多门学科于一体,反映了一个国家的智能化和自动化研究水平,同时也作为一个国家高科技实力的重要标志,各发达国家在该领域相继投入巨资开展研究。
2、鱼类推进模式主要包括尾鳍推进模式和胸鳍推进模式。尾鳍推进模式在速度、加速度和效率方面有着明显的优势;但是尾鳍推进模式运动灵活性低、运动噪声大。胸鳍推进模式在灵活性、稳定性和噪声方面有着更卓越的优势。由于胸鳍推进模式的灵活性强,可实现原地转弯;胸鳍推进模式的低噪声、低阻力,可减小水下作业时对其他生物的影响。现有仿生机器鱼为了简化设计,对自然原型的复杂机体结构特征和运动特征进行了大量简化。如采用鳍部被动变形设计,虽然这种设计使鳍部形态更接近真实鱼鳍,但其推动力明显降低,速度和加速度较低。如何克服上述缺点是当下研究的一个热点。通过研究,我们发现采用多鳍条推进方式,可以提高动力;同时,结合尾鳍和浮力系统,实现滑翔,以进一步提高续航时间。这种高效率、灵活性强、稳定性强、续航能力强的仿生机器鱼,可在复杂海底岩石面和水植物之间灵活游动,长时间工作,将具有重要的研究意义和工程价值。
技术实现思路
1、为了避免现有技术存在的不足,本发明提出一种仿生牛鼻鳐机器人。该发明通过多鳍条推进方式,通过机械模拟牛鼻鳐的外形和运动;利用浮力系统实现沉浮功能;结合尾鳍和浮力系统,实现水下滑翔功能。
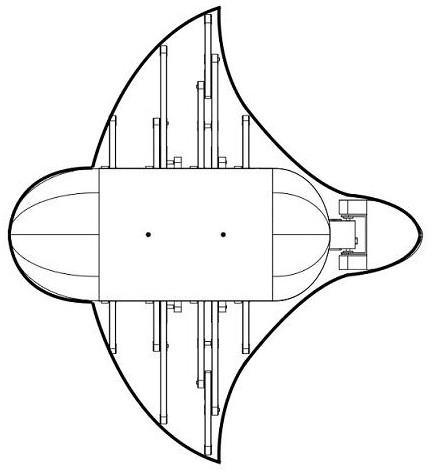
2、这种仿生牛鼻鳐机器人,其特征在于,包括:主体机架、控制器、驱动电机、左胸鳍、右胸鳍、尾鳍、浮力系统和皮肤;
3、所述主体机架包括上壳体、下壳体、前挡板、后挡板和驱动固定架,上壳体与驱动固定架固定连接,驱动固定架与下壳体固定连接,下壳体分别与前挡板、后挡板固定连接;
4、所述驱动电机包括驱动电机一、驱动电机二,所述驱动电机一与所述主体机架前挡板固定连接,所述驱动电机二与所述主体机架前挡板固定连接;
5、所述左胸鳍包括第一驱动轴一、第一驱动轴承一、第一鳍条一、第一从动轴一、第一从动轴承一、第一驱动轴承二、第一鳍条二、第一从动轴二、第一从动轴承二、第一驱动轴承三、第一鳍条三、第一从动轴三、第一从动轴承三,所述第一驱动轴一与所述驱动电机一端面啮合连接,所述第一驱动轴一与所述第一轴承一同轴连接,所述第一驱动轴一与所述第一鳍条一端面啮合连接,所述第一鳍条一与所述第一从动轴一端面啮合连接,所述第一从动轴一与所述第一从动轴承一同轴连接,所述第一驱动轴承一与所述驱动固定架固定连接,所述第一从动轴承一与所述驱动固定架固定连接,所述第一从动轴一与所述第一轴承二同轴连接,所述第一从动轴二与所述第一鳍条二端面啮合连接,所述第一鳍条二与所述第一从动轴二端面啮合连接,所述第一从动轴二与所述第一从动轴承二同轴连接,所述第一驱动轴承二与所述驱动固定架固定连接,所述第一从动轴承二与所述驱动固定架固定连接,所述第一从动轴二与所述第一驱动轴承三同轴连接,所述第一从动轴二与所述第一鳍条三端面啮合连接,所述第一鳍条三与所述第一从动轴三端面啮合连接,所述第一从动轴三与所述第一从动轴承三同轴连接,所述第一驱动轴承三与所述驱动固定架固定连接,所述第一从动轴承三与所述驱动固定架固定连接,所述第一从动轴三与所述驱动固定架同轴连接;
6、所述第一鳍条一包括第一曲柄一、第一曲柄二、第一摇杆、第一连杆,所述第一曲柄一与所述第一驱动轴一端面啮合连接,所述第一曲柄一、所述第一连杆与所述第一曲柄二同一铰链连接,所述第一连杆与所述第一摇杆铰链连接,所述第一摇杆与驱动固定架铰链连接;
7、所述第一鳍条二包括第二曲柄一、第二曲柄二、第二摇杆、第二连杆、第二鳍杆,所述第二曲柄一与所述第一从动轴一端面啮合连接,所述第二曲柄一、所述第二连杆与所述第二曲柄二同一铰链连接,所述第二连杆与所述第二摇杆铰链连接,所述第二摇杆与驱动固定架铰链连接,所述第二摇杆与第二鳍杆铰链连接,所述第二鳍杆与驱动固定架槽口连接;
8、所述第一鳍条三包括第三曲柄一、第三曲柄二、第三摇杆、第三连杆、第三鳍杆一、第三鳍杆二,所述第三曲柄一与所述第一从动轴二端面啮合连接,所述第三曲柄一、所述第三连杆与所述第三曲柄二同一铰链连接,所述第三连杆与所述第三摇杆铰链连接,所述第三摇杆与驱动固定架铰链连接,所述第三摇杆与第三鳍杆一铰链连接,所述第三摇杆与第三鳍杆二槽口连接,所述第三鳍杆一与驱动固定架槽口连接,所述第三鳍杆一与第三鳍杆二铰链连接;
9、所述右胸鳍包括第二驱动轴一、第二驱动轴承一、第二鳍条一、第二从动轴一、第二从动轴承一、第二驱动轴承二、第二鳍条二、第二从动轴二、第二从动轴承二、第二驱动轴承三、第二鳍条三、第二从动轴三、第二从动轴承三,所述第二驱动轴一与所述驱动电机二端面啮合连接,所述第二驱动轴一与所述第二轴承一同轴连接,所述第二驱动轴一与所述第二鳍条一端面啮合连接,所述第二鳍条一与所述第二从动轴一端面啮合连接,所述第二从动轴一与所述第二从动轴承一同轴连接,所述第二驱动轴承一与所述驱动固定架固定连接,所述第二从动轴承一与所述驱动固定架固定连接,所述第二从动轴一与所述第二轴承二同轴连接,所述第二从动轴二与所述第二鳍条二端面啮合连接,所述第二鳍条二与所述第二从动轴二端面啮合连接,所述第二从动轴二与所述第二从动轴承二同轴连接,所述第二驱动轴承二与所述驱动固定架固定连接,所述第二从动轴承二与所述驱动固定架固定连接,所述第二从动轴二与所述第二驱动轴承三同轴连接,所述第二从动轴二与所述第二鳍条三端面啮合连接,所述第二鳍条三与所述第二从动轴三端面啮合连接,所述第二从动轴三与所述第二从动轴承三同轴连接,所述第二驱动轴承三与所述驱动固定架固定连接,所述第二从动轴承三与所述驱动固定架固定连接,所述第二从动轴三与所述驱动固定架同轴连接。
10、所述第二鳍条一与所述第一鳍条一结构相同,各部件与驱动固定架连接方式相同;
11、所述第二鳍条二与所述第一鳍条二结构相同,各部件与驱动固定架连接方式相同;
12、所述第二鳍条三与所述第一鳍条三结构相同,各部件与驱动固定架连接方式相同。
13、进一步地,所述左胸鳍可以包括多个第一鳍条一、多个第一鳍条二、多个第一鳍条三,所述右胸鳍与所述左胸鳍沿着驱动固定架中轴面结构对称。
14、进一步地,所述浮力系统包括储水器固定架、储水器、水泵、电磁阀,所述储水器固定架与所述后挡板固定连接,所述储水器与所述储水器固定架固定连接,所述储水器与所述水泵管道连接,所述水泵与所述电磁阀管道连接,所述电磁阀与所述后档板管道连接
15、进一步地,所述尾鳍包括舵机、舵机固定架、舵机臂、尾部鳍,所述舵机固定架与所述下壳体固定连接,所述舵机固定架与所述舵机固定连接,所述舵机与所述舵机臂固定连接,所述舵机臂与所述尾部鳍固定连接。
16、进一步地,所述控制器包括信息采集器、微处理器、电池管理器、电机驱动器、通信器,所述信息采集器的输出端与所述微处理器的输入端电连接,所述电池管理器的输出端与所述微处理器的输入端电连接,所述电池管理器的输出端与所述电机驱动器的输入端电连接,所述通信器的输出端与所述微处理器的输入端电连接,所述微处理器的输出端与所述通信器的输入端电连接,所述电机驱动器的输出端与所述舵机的输入端电连接,所述电机驱动器的输出端与所述驱动电机一的输入端电连接,所述电机驱动器的输出端与所述驱动电机二的输入端电连接,所述电机驱动器的输出端与所述水泵的输入端电连接,所述微处理器的输出端与所述电磁阀的输入端电连接。
17、进一步地,所述皮肤采用弹性材料,并覆盖于主体机架、左胸鳍、右胸鳍、尾鳍的外部。
18、本发明的技术效果和优点:该一种仿生牛鼻鳐机器人可在水下高灵活性的运动,具有原地转弯的能力,具有效率高、环境保护能力强的特点。本发明结构简单、控制方便。本发明结构设计巧妙、体积小、质量轻、续航能力强、加工生产方便,可为复杂的水下环境平台提供解决方案。
- 还没有人留言评论。精彩留言会获得点赞!