一种水面救援机器人的制作方法
1.本发明涉及水上救援用机器人技术领域,具体为一种水面救援机器人。
背景技术:
2.水上救援是一项水上的救援活动,包括快速出动、救护编队、水上救生、输送灾民、抢运物资等项目,对保障人民群众生命财产安全、保护海洋生态环境、服务国家发展战略、提升国际影响力具有重要作用,由于科技的发展,在水上救援活动中出线了一种水上救援机器人,水上救援机器人融入了最新的无人机技术、水上机器人救生技术、gps和北斗双定位技术,在实现了快速救生与精准救生的同时,还实现了双面救生与自动返航等功能,能够在高效救援的同时还能从容应对复杂和恶劣的救援环境,可通过遥控的方式快速到达落水者身旁。落水者可以抓住两侧的手带或是横梁,操作者通过遥控机器至安全地带使落水者成功获救。
3.但是,现有水上救援机器人只能通过人工遥控,使船行驶到的人眼可见的遇险人员旁边,遇险人员再抓住机器人进行施救,若有遇险人员在水中昏迷下沉,救援机器人无法进行搜寻工作,会导致营救更加困难。
4.所以我们提出了一种水面救援机器人,以便于解决上述中提出的问题。
技术实现要素:
5.本发明的目的在于提供一种水面救援机器人,以解决上述背景技术中提出的现有水上救援机器人只能通过人工遥控,使船行驶到的人眼可见的遇险人员旁边,遇险人员再抓住机器人进行施救,若有遇险人员在水中昏迷下沉,救援机器人无法进行搜寻工作,会导致营救更加困难的问题。
6.为实现上述目的,本发明提供如下技术方案:一种水面救援机器人,包括控制救援机器人,所述控制救援机器人的前端设置有顶浮筒,所述顶浮筒的两侧均设置有斜浮筒,所述斜浮筒的后端设置有尾浮筒,所述顶浮筒、斜浮筒与尾浮筒的中间下端设置有仓底,所述仓底的上端设置有机仓,所述机仓的前端设置有隔板,所述隔板的下方设置有卷筒仓,所述卷筒仓的内部设置有卷线筒,所述卷线筒上缠绕有收放线,所述卷线筒的前端设置有声纳支架,所述声纳支架的前端下方设置有声纳仪,且声纳仪与收放线连接。
7.优选的,所述隔板的后端一侧设置有转动电机,所述转动电机的一侧设置有传动机构,且传动机构的前端另一侧与卷线筒的一侧啮合连接,所述控制救援机器人的上方设置有顶盖。
8.优选的,所述卷线筒的两侧均设置有线卷卡,且线卷卡焊接在隔板的内壁上,且卷线筒通过密封轴承与线卷卡连接。
9.优选的,所述声纳仪的下方设置有固定环,所述固定环的下方设置有配重块,且配重块通过配重环与固定环连接,且配重块与配重环焊接连接。
10.优选的,所述声纳支架的内部设置有线道,声纳支架的后端设置有进线孔,所述声
纳支架的前端下方设置有出线孔,且进线孔和出现孔分别与线道的后端与前端连接。
11.优选的,所述转动电机的另一侧设置有移动电源,所述转动电机与移动电源的后端设置有推进器,所述转动电机、移动电源与推进器的上方设置有控制箱,且控制箱的输出端均与转动电机,移动电源和推进器的输入端电性连接,且移动电源的输出端均与转动电机和推进器的输入端电性连接。
12.优选的,所述顶浮筒与两个斜浮筒上均设置有一个扶手,且两个尾浮筒上均设置有两个扶手,且扶手通过固定扣与顶浮筒、斜浮筒和尾浮筒连接,两侧所述尾浮筒的后端均设置有输水管道。
13.优选的,所述卷筒仓的前端下方设置有进出口,所述进出口的后端设置有进水口,所述进水口的内部设置有过滤网,且进水口与推进器连接。
14.优选的,所述推进器的两侧设置有推进管道,且两侧的推进管道分别与两侧的输水管道连接,所述输水管道的后端设置有出水口。
15.与现有技术相比,本发明的有益效果是:
16.1、本发明通过在救援机器人的内部设置声纳仪,将声纳仪投入水中后,声纳仪发射出声波进行水下探测,再将探测到的水下周围情况数据通过收放线传输给终端,终端旁的工作人员通过数据分析是否有遇险者在水下需要救援,若有可去到遇险者旁边进行救援工作,可避免现有水上救援机器人只能通过人工遥控,使船行驶到的人眼可见的遇险人员旁边,遇险人员再抓住机器人进行施救,若有遇险人员在水中昏迷下沉,救援机器人无法进行搜寻工作,会导致营救更加困难的问题,通过将救援机器人的顶浮筒、斜浮筒与尾浮筒内的空间隔开,可避免某一个浮筒破损后水进入所有浮筒内,导致救援机器人无法使用的问题发生。
17.2、通过在救援机器人的内部设置转动电机与卷线筒,再通过传动机构将二者连接,启动转动电机后使卷线筒转动,卷线筒进行放线或收线,以便将声纳仪放入水中或收回,通过在声纳仪的下方设置配重块,可将声纳仪拉入水下,可避免声纳仪漂浮在水面,减弱探测效果,声纳支架内的线道转弯处均为圆角,避免剐蹭收放线路,减少其使用寿命的问题发生,通过设置隔板,可将卷筒仓与机仓隔开,避免水通过进出口进入机仓内,破坏机仓内的电气元件,并且密封的机仓可增加救援机器人的浮力,通过在顶浮筒、斜浮筒、尾浮筒上设置多个扶手,可供多人抓持,可一次救援更多人,提高救援效率。
附图说明
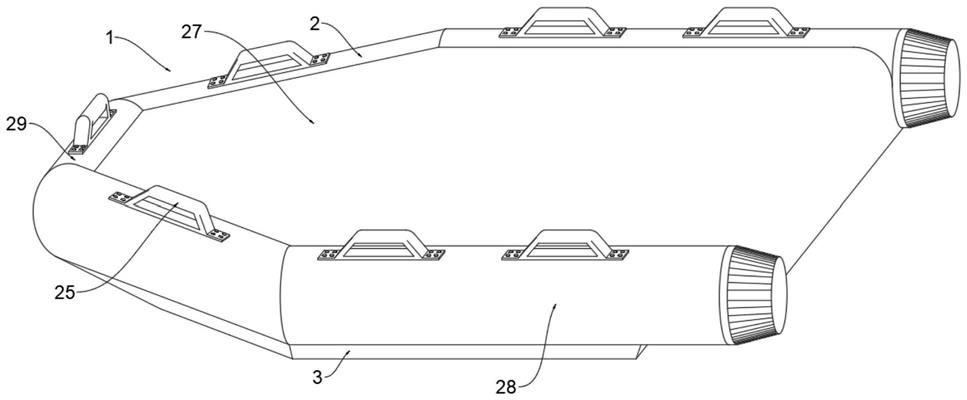
18.图1为本发明的整体结构示意图;
19.图2为本发明的机仓内部结构示意图;
20.图3为本发明的底部结构示意图;
21.图4为本发明的控制箱下方与卷筒仓内部结构示意图;
22.图5为本发明的声纳支架结构示意图;
23.图中:1、控制救援机器人;2、斜浮筒;3、仓底;4、机仓;5、隔板;6、卷筒仓;7、线卷卡;8、卷线筒;9、声纳支架;10、进线孔;11、声纳仪;12、固定环;13、配重块;14、配重环;15、转动电机;16、传动机构;17、移动电源;18、推进器;19、推进管道;20、输水管道;21、进出口;22、过滤网;23、控制箱;24、出水口;25、扶手;26、固定扣;27、顶盖;28、尾浮筒;29、顶浮筒;
30、进水口;31、收放线。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
25.请参阅图1-5,本发明提供的一种实施例:一种水面救援机器人,包括控制救援机器人1,所述控制救援机器人1的前端设置有顶浮筒29,所述顶浮筒29的两侧均设置有斜浮筒2,所述斜浮筒2的后端设置有尾浮筒28,所述顶浮筒29、斜浮筒2与尾浮筒28的中间下端设置有仓底3,所述仓底3的上端设置有机仓4,所述机仓4的前端设置有隔板5,所述隔板5的下方设置有卷筒仓6,所述卷筒仓6的内部设置有卷线筒8,所述卷线筒8上缠绕有收放线31,所述卷线筒8的前端设置有声纳支架9,所述声纳支架9的前端下方设置有声纳仪11,且声纳仪11与收放线31连接,顶浮筒29、斜浮筒2与尾浮筒28内的空间相互隔开,可避免某个浮筒破损后水进入所有浮筒内,救援机器人浮力减弱,导致其沉没,隔板5可将机仓4与卷筒仓6隔开,避免水从卷筒仓6进入机仓4内,破坏机仓4内部电气元件,并可增加救援机器人的浮力,卷线筒8转动可卷起或放松收放线31,以便将声纳仪11放入水中或收起,声纳仪11可探测出附近物体,通过收放线31将数据传输给终端,终端旁的工作人员可根据传输回的数据判断是否有人在水下需要救援,可避免现有水上救援机器人只能通过人工遥控,使船行驶到的人眼可见的遇险人员旁边,遇险人员再抓住机器人进行施救,若有遇险人员在水中昏迷下沉,救援机器人无法进行搜寻工作,会导致营救更加困难的问题发生。
26.进一步,所述隔板5的后端一侧设置有转动电机15,所述转动电机15的一侧设置有传动机构16,且传动机构16的前端另一侧与卷线筒8的一侧啮合连接,所述控制救援机器人1的上方设置有顶盖27,转动电机15启动通过传动机构16将动力传输给卷线筒8,可使卷线筒8转动,以便收放声纳仪11。
27.进一步,所述卷线筒8的两侧均设置有线卷卡7,且线卷卡7焊接在隔板5的内壁上,且卷线筒8通过密封轴承与线卷卡7连接,使用密封轴承连接线卷卡7与卷线筒8可避免水从连接处进入机仓4内,破坏机仓4内的电气元件。
28.进一步,所述声纳仪11的下方设置有固定环12,所述固定环12的下方设置有配重块13,且配重块13通过配重环14与固定环12连接,且配重块13与配重环14焊接连接,配重块13可将声纳仪11向下拉,可避免声纳仪11的浮力太高导致其漂浮在水面上,导致探测效果减弱,影响救援效率。
29.进一步,所述声纳支架9的内部设置有线道,声纳支架9的后端设置有进线孔10,所述声纳支架9的前端下方设置有出线孔,且进线孔10和出现孔分别与线道的后端与前端连接,收放线31从进线孔10进入,通过线道,再从出现孔穿出,与声纳仪11连接,声纳支架9可限制住收放线31的活动范围,避免收放线31来回移动,影响声纳仪11的探测效果。
30.进一步,所述转动电机15的另一侧设置有移动电源17,所述转动电机15与移动电源17的后端设置有推进器18,所述转动电机15、移动电源17与推进器18的上方设置有控制箱23,且控制箱23的输出端均与转动电机15,移动电源17和推进器18的输入端电性连接,且移动电源17的输出端均与转动电机15和推进器18的输入端电性连接,移动电源17可为机器人的用电机构供电,推进器18启动可从出水口24喷出水,为机器人提供推力,使机器人移
动,以便将需要救援的人拉回岸边或搜寻需要救援的人。
31.进一步,所述顶浮筒29与两个斜浮筒2上均设置有一个扶手25,且两个尾浮筒28上均设置有两个扶手25,且扶手25通过固定扣26与顶浮筒29、斜浮筒2和尾浮筒28连接,两侧所述尾浮筒28的后端均设置有输水管道20,多个扶手25可供多人抓持,可一次救援多人,提高救援效率。
32.进一步,所述卷筒仓6的前端下方设置有进出口21,所述进出口21的后端设置有进水口30,所述进水口30的内部设置有过滤网22,且进水口30与推进器18连接,推进器18启动后,可从进水口30吸入水,从出水口24喷出,使救援机器人移动,过滤网22可避免有异物进入推进器18,导致推进器18损坏。
33.进一步,所述推进器18的两侧设置有推进管道19,且两侧的推进管道19分别与两侧的输水管道20连接,所述输水管道20的后端设置有出水口24,推进管道19与输水管道20将从推进器18喷出的水导向出水口24,为救援机器人提供推力,将需要救援的人拉回岸边或搜寻需要救援的人。
34.工作原理:使用时,水面无人,在需要进行水下搜救时,将救援机器人放入水中,远程通过控制箱23控制机器人启动转动电机15,传动机构16将转动电机15产生的动力传输给卷线筒8,使卷筒仓6内的卷线筒8转动,将收放线31放松,配重块13的向下的拉力将声纳仪11向下拉,穿过进出口21,进入水中,启动声纳仪11,声纳仪11发射出声波进行水下探测,再将探测到的水下周围情况数据通过收放线31传输给终端,终端旁的工作人员通过数据分析是否有遇险者在水下需要救援,
35.若无,通过远程控制控制箱23启动推进器18,推进器18启动产生推力使机器人拉着声纳仪11移动,在搜寻到水下遇险的人后,救援人员再想办法下水进行救援工作,搜寻完毕后,控制转动电机15使其反转,进一步使卷线筒8反转将收放线31卷起,将声纳仪11拉回即可,若水面有需要救援的人,直接将救援机器人放入水中,通过控制推进器18使机器人前往遇险者的身边,遇险的人抓住扶手25,再控制机器人将其带回即可。
36.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1