水下机器人的制作方法
1.本技术涉及水下设备领域,具体涉及一种水下机器人。
背景技术:
2.目前,无人潜航器进行水面回收时,多采用母船释放小艇,通过小艇上的人员携带回收工具,如通过吊钩靠近无人潜航器,人工完成吊钩与无人潜航器上吊点的连接动作,但这种无人潜航器的回收方式受海上风浪影响较大,人工完成作业时存在一定的安全风险,且效率不高。
技术实现要素:
3.基于此,本技术提供了一种水下机器人,通过水下机器人完成水中设备的回收,安全可靠。
4.本技术的一个实施例提供一种水下机器人,包括:机器人本体,所述机器人本体的外壁上起吊件;翻转抱臂,设置于所述机器人本体上,所述翻转抱臂用于夹紧水中设备。
5.根据本技术的一些实施例,所述翻转抱臂包括:上抱臂,通过第一转轴可旋转的设置于所述机器人本体上;下抱臂,通过第二转轴可旋转的设置于所述机器人本体上,所述下抱臂位于所述上抱臂的下方;第一驱动器,带动所述上抱臂旋转;第二驱动器,带动所述下抱臂旋转。
6.根据本技术的一些实施例,所述上抱臂包括第一支撑部和第一弧形部,所述第一支撑部的一端连接所述第一转轴,所述第一支撑部的另一端连接所述第一弧形部;所述下抱臂包括第二支撑部和第二弧形部,所述第二支撑部的一端连接所述第二转轴,所述第二支撑部的另一端连接所述第二弧形部。
7.根据本技术的一些实施例,所述第一弧形部和第二弧形部的内壁上设置防滑橡胶条。
8.根据本技术的一些实施例,所述第一支撑部连接所述第一弧形部的一端的侧壁上设置第一卡齿;所述第一弧形部连接所述第一支撑部的一端的侧壁上设置第二卡齿,所述第二卡齿与所述第一卡齿啮合;所述第二支撑部连接所述第二弧形部的一端的侧壁上设置第三卡齿;所述第二弧形部连接所述第二支撑部的一端的侧壁上设置第四卡齿,所述第四卡齿与所述第三卡齿啮合。
9.根据本技术的一些实施例,所述第一支撑部为一字型。
10.根据本技术的一些实施例,所述第二支撑部为l型。
11.根据本技术的一些实施例,所述上抱臂的数量为两个,两个所述上抱臂分别位于所述机器人本体的两侧;所述下抱臂的数量为两个,两个所述下抱臂分别位于所述机器人本体的两侧。
12.根据本技术的一些实施例,所述机器人本体的侧壁上设置第一挡块和第二挡块,所述翻转抱臂后翻时,所述第一挡块对所述上抱臂进行限位,所述第二挡块对所述下抱臂
进行限位。
13.根据本技术的一些实施例,所述第一驱动器和第二驱动器均为电机。
14.本技术的水下机器人,进行水中设备的回收时,通过翻转抱臂夹紧所述水中设备,机器人本体上的起吊件连接母船上的起吊设备,通过水下机器人完成水中设备的回收,避免人员下水操作带来的意外风险,安全可靠,作业效率高。
附图说明
15.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图,而并不超出本技术要求保护的范围。
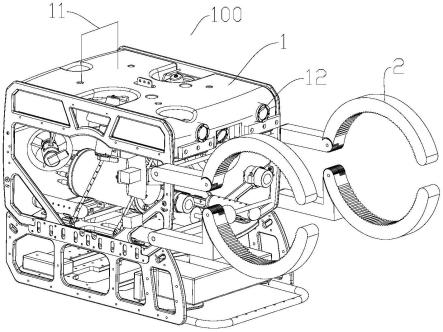
16.图1是本技术实施例水下机器人的示意图;
17.图2是本技术实施例水下机器人夹紧水中设备的示意图;
18.图3是本技术实施例的水下机器人的翻转抱臂后翻状态示意图;
19.图4是本技术实施例翻转抱臂的示意图一;
20.图5是本技术实施例翻转抱臂的示意图二;
21.图6是本技术实施例翻转抱臂后翻过程示意图;
22.图7是本技术实施例上抱臂的爆炸图;
23.图8是本技术实施例下抱臂的示意图。
具体实施方式
24.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
25.如图1、图2和图3所示,本实施例提供一种水下机器人100。水下机器人100包括机器人本体1和翻转抱臂2。翻转抱臂2设置于机器人本体1上。翻转抱臂2前翻,可夹住水中设备200,实现水中设备的回收。
26.本实施例的机器人本体1选择已有的机器人本体,机器人本体上的多个推进器使得水下机器人100可在水中移动。操作人员可在母船上通过遥控对水中的水下机器人100进行控制。机器人本体1的外壁上设置起吊件11,吊件11连接母船上的起吊设备,便于对水下机器人100进行起吊。本实施例中,吊件11位于机器人本体1的顶部。可选地,在机器人本体1的前端设置前端摄像头12,以便于操作人员观察水中的情况。
27.翻转抱臂2连接机器人本体1上的控制单元(如处理器),使得操作人员可通过遥控对翻转抱臂2进行控制。翻转抱臂2向前翻转,可用于在水中夹紧水中设备200。即使在风浪较大的情况下,通过翻转抱臂2夹紧水中设备200,可保证水下机器人100与水中设备200的相对静止。本实施例的水中设备200为无人潜航器。
28.本技术通过翻转抱臂2的翻转可实现对水中设备200的夹紧及松开。翻转抱臂2夹紧水中设备200时,水下机器人100与水中设备200相对静止,通过母船上的起吊设备将水下
机器人100和水中设备200拉回母船,实现水中设备200的回收。操作人员通过控制水下机器人100完成水中设备200的回收,避免风浪对人员安全的影响,作业效率高。
29.如图4、图5和图6所示,根据本技术一个可选的技术方案,翻转抱臂2包括:上抱臂21、第一驱动器23、下抱臂24和第二驱动器26。可选地,本实施例的第一驱动器23和第二驱动器26均为电机。
30.上抱臂21通过第一转轴22可旋转的设置于机器人本体1上。第一转轴22通过传动结构连接第一驱动器23,第一转轴22和第一驱动器23之间的传动结构可以选用已有的减速器。第一驱动器23通过第一转轴22带动上抱臂21翻转,第一驱动器23正转时带动上抱臂21前翻,第一驱动器23反转时带动上抱臂21后翻。
31.下抱臂24通过第二转轴25可旋转的设置于机器人本体1上,下抱臂24位于上抱臂21的下方。第二转轴25通过传动结构连接第二驱动器26,第二转轴25和第二驱动器26之间的传动结构可以选用已有的减速器。第二驱动器26通过第二转轴25带动下抱臂24翻转,第二驱动器26正转时带动下抱臂24前翻,第二驱动器26反转时带动下抱臂24后翻。
32.上抱臂21和下抱臂25前翻时,上抱臂21和下抱臂25配合夹紧水中设备200。将水下机器人100和水中设备200拉回到母船后,上抱臂21和下抱臂25后翻时,松开水中设备200。
33.如图7所示,根据本技术一个可选的技术方案,上抱臂21包括第一支撑部211和第一弧形部212。第一弧形部212为弧形,第一弧形部212的内壁直径与水中设备200的外径相配合。第一支撑部211的一端设置连接孔2111,第一支撑部211通过连接孔2111连接第一转轴22。第一支撑部211的另一端设置连接孔2114,第一弧形部212的一端设置连接孔2124,通过螺栓穿过连接孔2114和连接孔2124实现第一支撑部211和第一弧形部212的固定连接。
34.如图8所示,下抱臂24包括第二支撑部241和第二弧形部242。第二弧形部242为弧形,第二弧形部242的内壁直径与水中设备200的外径相配合。第二支撑部241的一端设置连接孔2411,第二支撑部241通过连接孔2411连接第二转轴26。第二支撑部241的另一端与第二弧形部242连接。可选地,第二支撑部241和第二弧形部242通过螺栓连接。第二支撑部241的一端设置连接孔2412,第二弧形部242的一端设置连接孔2422,通过螺栓穿过连接孔2412和连接孔2422实现第二支撑部241和第二弧形部242的连接。
35.第一弧形部212由上方紧贴水中设备200,第二弧形部242由下方紧贴水中设备200,第一弧形部212和第二弧形部242配合将水中设备200夹紧。
36.根据本技术一个可选的技术方案,在第一弧形部212的内壁2121和第二弧形部242的内壁2421上设置防滑橡胶条,提高防滑效果的同时避免第一弧形部212和第二弧形部242划伤水中设备200。
37.根据本技术一个可选的技术方案,第一支撑部211连接第一弧形部212的一端包括第一凸面2112和第一凹面2113,第一凸面2112和第一凹面2113之间的侧壁上设置第一卡齿2115。本实施例的多个第一卡齿2115绕连接孔2114的轴线周向均布。第一弧形部212连接第一支撑部211的一端包括第二凸面2122和第二凹面2123,第二凸面2122和第二凹面2123之间的侧壁上设置第二卡齿2125。本实施例的第二卡齿2125绕连接孔2124的轴线周向均布。第一凸面2112和第二凹面2123配合,第一凹面2113和第二凸面2122配合。第一卡齿2115和第二卡齿2125啮合,便于微调第一弧形部212相对第一支撑部211的角度,使得第一弧形部212可以更好的贴合水中设备。
38.第二支撑部241连接第二弧形部242的一端的侧壁上设置第三卡齿2413,多个第三卡齿2413绕连接孔2412的轴线周向均布。第二弧形部242连接第二支撑部241的一端的侧壁上设置第四卡齿2423,多个第四卡齿2423绕连接孔2422的轴线周向均布。第四卡齿2423与第三卡齿2413啮合,以便调整第二弧形部242相对第二支撑部241的角度。
39.根据本技术一个可选的技术方案,本实施例的第一支撑部211为“一”字型。根据需要,第一支撑部211也可设置为其它形状。
40.根据本技术一个可选的技术方案,本实施例的第二支撑部241为“l”型。“l”型的第二支撑部241使得第二弧形部242可以更好的与第一弧形部212配合夹紧水中设备200。
41.根据本技术一个可选的技术方案,上抱臂21的数量为两个,两个上抱臂21分别设置于第一转轴22的两端,以使两个上抱臂21分别位于机器人本体1的两侧。下抱臂24的数量为两个,两个下抱臂24分别设置于第二转轴25的两端,以使两个下抱臂24分别位于机器人本体1的两侧。机器人本体1两侧的上抱臂21和下抱臂24分别配合,实现对水中设备200的两个位置的夹紧,保证水下机器人100与水中设备200相对静止。
42.如图3所示,机器人本体1的侧壁上设置第一挡块27和第二挡块28。翻转抱臂2后翻到位时,上抱臂21紧贴第一挡块27,第一挡块27对上抱臂21进行限位,下抱臂24紧贴第二挡块28,第二挡块28对下抱臂24进行限位。通过第一挡块27和第二挡块28的限位,避免上抱臂21和下抱臂24后翻时出现碰撞。
43.本实施例通过水下机器人100回收水中设备200时的步骤包括:
44.s1、将水下机器人放入水中,控制水下机器人靠近水中设备;
45.s2、向前翻转水下机器人的翻转抱臂,翻转抱臂夹紧水中设备;
46.s3、通过母船上的起吊设备起吊水下机器人100和水中设备200;
47.s4、水下机器人100和水中设备200回到母船后,水下机器人100松开水中设备200。
48.本技术的水下机器人,进行水中设备的回收时,通过翻转抱臂夹紧水中设备,实现水中设备的起吊,即使在风浪较大的情况下也能可靠的实现水中设备的起吊连接。
49.以上对本技术实施例进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明仅用于帮助理解本技术的方法及其核心思想。同时,本领域技术人员依据本技术的思想,基于本技术的具体实施方式及应用范围上做出的改变或变形之处,都属于本技术保护的范围。综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1