一种无人控藻船的制作方法
1.本专利申请涉及蓝藻处理技术领域,特别是涉及一种无人控藻船。
背景技术:
2.众所周知,水华蓝藻的去除是饮用水处理的一大难题,我国水源湖泊、水库的水华蓝藻以微囊藻为主,水华微囊蓝藻颗粒是由几个至几百个藻细胞组成的藻群体,藻颗粒直径为40~1000μm,而单个藻细胞直径为数微米。水华蓝藻之所以难处理是因为藻细胞内有气囊,为藻类提供浮力,使藻类不能下沉;另外,微囊藻细胞外被胶质鞘包裹,阻碍混凝剂与之结合,影响混凝效果。
3.经过研究表明采用压力预处理后再进行混凝沉淀去除水华蓝藻具有较好的效果,克服了现有预氧化杀藻导致藻细胞破裂的问题,避免了藻毒素和藻液外泄,降低了产生消毒副产物的风险,提高了供水安全性。具体的,利用密闭容器中压力的传递性,仅消耗很小的能量就能使容器内压力上升到藻细胞气囊破裂所需的压力,其能耗在水处理过程中所占的比例很小,几乎可以忽略。因此,采用压力预处理可大大改善蓝藻的混凝沉淀性能,该方法有望成为水华蓝藻处理技术的一个发展方向。
4.现有已经出现一些控藻设备,但这些设备一般都是固定在河道或湖道的岸边,其控藻范围有限,另外,在控藻过程中不免出现一些漂浮在水面上的杂物,如不进行阻拦容易堵住控藻设备,为此,我们提出一种无人控藻船。
技术实现要素:
5.鉴于以上所述现有技术的缺点,本专利申请的目的在于提供一种无人控藻船,解决上述现有技术的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种无人控藻船,包括行驶方向的前端成倒t形结构的船体以及远程控制船体移动的遥控器,船体的后端下部对称安装有两个推进器,所述远程控制船体上安装有主控板和无线收发器,无线收发器接收来自遥控器输出的控制指令信号发送至主控板,推进器接收来自主控板的信号控制船体的航行方向,船体前端的倒t形结构处安装有控藻装置。
8.进一步的,所述控藻装置包括一安装在船体舱内用于抽吸水面蓝藻的吸入泵,吸入泵的泵入口通过管道穿过船体与外部连通,吸入泵的泵出口连接有另一端与船体外部连通的出液管路,出液管路上安装有流量调节器,吸入泵和流量调节器分别与主控板信号连接。
9.进一步的,所述控藻装置还包括有安装在船体倒t形结构前端用于将杂物阻挡在外的过滤装置。
10.进一步的,所述过滤装置包括设在船体倒t形结构前端的过滤板,船体倒t形结构处还安装有用于调节过滤板涉水深度的升降机构。
11.进一步的,所述升降机构包括固定在船体倒t形结构两侧且向上延伸的倒u型架,
倒u型架的框架内设有前端安装过滤板的支撑架,支撑架的上端连接有安装板,安装板的上端中部转动连接有丝杆,丝杆的上端穿过倒u型架的顶部到达倒u型架的上方连接减速机的输出端,减速机安装在倒u型架的上端面,减速机的输入端连接驱动电机的输出端,驱动电机与主控板信号连接,安装板的上端面对称连接有两个上端穿过倒u型架顶部到达倒u型架上方的导向杆。
12.进一步的,所述支撑架的前端开设有供过滤板插入的槽口。
13.进一步的,所述船体上还安装有激光雷达摄像头,激光雷达摄像头与无线收发器通讯连接,激光雷达摄像头将监控信号经无线收发器传输至遥控器上的显示屏内。
14.进一步的,所述无线收发器包括安装在船体上接收信号的无线接收器和发送指令的无线发送器。
15.进一步的,所述出液管路上还安装有实时检测进入流量调节器内蓝藻压力的压力计。
16.进一步的,所述出液管路上还安装有与流量调节器和压力计形成并联的分支管路,分支管路上安装有安全泄压阀,压力计和安全泄压阀分别与主控板信号连接。
17.与现有技术相比,本实用新型的有益效果是:
18.1、通过遥控器远程控制船体在水面上航行,扩大蓝藻处理范围,提升工作效率;
19.2、通过安全泄压阀和流量调节器之间的协同工作,一旦出现堵塞能够及时泄压,不仅提高了控藻设备的安全性能,而且还能够确保经过安全泄压阀或/和流量调节器的流体中蓝藻的气囊破裂,以达到加压控藻的目的,同时结构简单,实施方便,且成本低;
20.3、根据船体吃水深度,通过驱动电机启动驱动丝杆升降,以达到调节过滤板的涉水深度,从而更有效的达到过滤的效果,防止阻塞吸入泵的泵入口。
附图说明
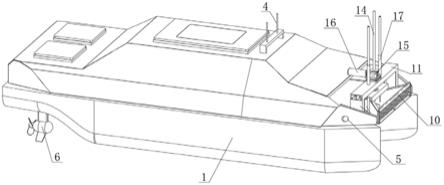
21.图1为本实用新型船体立体结构示意图;
22.图2为本实用新型控制原理示意框图;
23.图3为本实用新型加压控藻原理结构示意图;
24.图4为本实用新型升降装置和过滤板立体结构示意图。
25.附图标号说明:船体1、遥控器2、主控板3、无线收发器4、激光雷达摄像头5、推进器6、吸入泵7、出液管路8、安全泄压阀81、流量调节器9、压力计91、过滤板10、倒u型架11、支撑架12、安装板13、丝杆14、减速机15、驱动电机16、导向杆17。
具体实施方式
26.以下通过特定的具体实例说明本专利申请的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本专利申请的其他优点与功效。本专利申请还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本专利申请的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
27.请参阅图1-4,本实用新型提供一种技术方案:
28.一种无人控藻船,如图1和图2所示,包括行驶方向的前端成倒t形结构的船体1以
及远程控制船体1移动的遥控器2,船体1内放置有提供电能的蓄电池,船体1的后端下部对称安装有两个推进器6,远程控制船体1上安装有主控板3和无线收发器4,无线收发器4包括安装在船体1上接收信号的无线接收器和发送指令的无线发送器,无线收发器4接收来自遥控器2输出的控制指令信号发送至主控板3,推进器6接收来自主控板3的信号控制船体1的航行方向,船体1上还安装有激光雷达摄像头5,激光雷达摄像头5与无线收发器4通讯连接,激光雷达摄像头5将监控信号经无线收发器4传输至遥控器2上的显示屏内,实时监控所经过水域状况。通过遥控器2远程控制船体1在水面上航行进行大范围的控藻。
29.结合图1和图3,船体1前端的倒t形结构处安装有控藻装置,控藻装置包括一安装在船体1舱内用于抽吸水面蓝藻的吸入泵7,吸入泵7具有泵入口和泵出口,吸入泵7的泵入口通过管道穿过船体1与船体1的前端外部连通,吸入泵7的泵出口连接有另一端与船体1外部连通的出液管路8,出液管路8上安装有流量调节器9,吸入泵7和流量调节器9分别与主控板3信号连接,可通过遥控器2远程控制,控制出液管路8的流通或闭合状态,流量调节器9为能够自锁打开或闭合状态的蝶阀,蝶阀可以在全开与全闭之间切换调节,并在阀杆上安装有蜗轮减速器,其中在蜗轮减速器控制下实现所述蝶阀状态的自锁。出液管路8上还安装有实时检测进入流量调节器9内蓝藻压力的压力计91,出液管路8上还安装有与流量调节器9和压力计91形成并联的分支管路,分支管路上安装有安全泄压阀81,压力计91和安全泄压阀81分别与主控板3信号连接,安全泄压阀81为背压阀,主要是考虑调压精度,以确保经过背压阀或/和流量调节器9的流体中蓝藻的气囊破裂,以达到加压控藻的目的,同时结构简单,实施方便,且成本低。
30.作为本案的优选实施例,如图1和图4所示,控藻装置还包括有安装在船体1倒t形结构前端用于将杂物阻挡在外的过滤装置,过滤装置包括设在船体1倒t形结构前端的过滤板10,用于将杂物阻隔在外,船体1倒t形结构处还安装有用于调节过滤板10涉水深度的升降机构,升降机构包括固定在船体1倒t形结构两侧且向上延伸的倒u型架11,倒u型架11的框架内设有前端安装过滤板10的支撑架12,支撑架12的前端开设有供过滤板10插入的槽口,方便过滤板10的拆装,支撑架12的上端连接有安装板13,安装板13的上端中部转动连接有丝杆14,丝杆14的上端穿过倒u型架11的顶部到达倒u型架11的上方连接减速机15的输出端,减速机15安装在倒u型架11的上端面,减速机15的输入端连接驱动电机16的输出端,驱动电机16与主控板3信号连接,遥控器2可以远程控制过滤板10的升降,安装板13的上端面对称连接有两个上端穿过倒u型架11顶部到达倒u型架11上方的导向杆17,起导向作用。遥控器2根据激光雷达摄像头5传输的画面数据控制驱动电机16,驱动电机16启动,通过减速机15调速后驱使丝杆14转动,从而带动支撑架12升降,实现调整过滤板10的目的。
31.上述实施例仅例示性说明本专利申请的原理及其功效,而非用于限制本专利申请。任何熟悉此技术的人士皆可在不违背本专利申请的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本专利申请所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本专利申请的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1