ROV整体包覆式保护网的制作方法
rov整体包覆式保护网
技术领域
1.本实用新型涉及rov技术领域,具体来说,涉及rov整体包覆式保护网。
背景技术:
2.rov即水下机器人,系统组成包括:动力推进器、遥控电子通讯装置、黑白或彩色摄像头、摄像俯仰云台、用户外围传感器接口、实时在线显示单元、导航定位装置、自动舵手导航单元、辅助照明灯和机械臂等单元部件,但是现在一些rov在水下进行工作时外部没有保护网结构,在进行水下探测工作时不对rov进行保护rov外侧可能会被水草杂物缠绕,影响使用,同时现在的一些rov在工作时会通过机械臂进行海底取样和进行线缆切割等工作,但是现在的一些保护网是一体的不方便rov的机械臂进行海底工作,针对上述问题提出rov整体包覆式保护网。
技术实现要素:
3.针对相关技术中的问题,本实用新型提出rov整体包覆式保护网,以克服现有相关技术所存在的上述技术问题。
4.本实用新型的技术方案是这样实现的:
5.rov整体包覆式保护网,包括rov、保护网组件和伸缩组件,所述rov包括rov本体和机械臂,所述机械臂与rov本体固定连接。
6.进一步的,所述保护网组件包括保护网箱、保护网板、固定螺钉和把手,所述保护网箱右端面顶部固定连接有防水箱,所述防水箱内侧固定连接有控制器,所述控制器下方设有电池,所述电池与防水箱固定连接,所述防水箱右端面铰链连接有箱门,所述把手贯穿保护网箱,所述把手与保护网箱转动连接,所述把手的另一端固定连接有第一螺纹轴,所述第一螺纹轴外侧螺旋连接有限位板,所述限位板贯穿保护网箱,所述限位板与保护网箱滑动连接。
7.进一步的,所述保护网板贯穿保护网箱,所述保护网板与保护网箱滑动连接,所述固定螺钉贯穿保护网箱,所述固定螺钉与保护网箱螺旋连接,所述固定螺钉贯穿保护网板,所述固定螺钉与保护网板螺旋连接。
8.进一步的,所述把手内侧嵌设有滚珠,所述滚珠贯穿把手,所述滚珠与把手转动连接,所述滚珠与保护网箱转动连接。
9.进一步的,所述限位板外侧固定连接有防滑垫,所述防滑垫与rov本体滑动连接,所述防滑垫是橡胶材质的材料制成的。
10.进一步的,所述伸缩组件包括电机,所述电机与保护网箱固定连接,所述电机的主轴末端固定连接有第二螺纹轴,所述第二螺纹轴外侧螺旋连接有防护网板,所述防护网板贯穿保护网箱,所述防护网板与保护网箱滑动连接。
11.本实用新型提供了rov整体包覆式保护网,本实用新型的有益效果如下:
12.1、本实用新型中,通过设置的保护网箱、保护网板、把手、第一螺纹轴、限位板和防
滑垫,使用时把rov本体放在保护网箱内,然后转动把手带动第一螺纹轴转动,第一螺纹轴转动带动限位板滑动,限位板带动防滑垫运动对rov本体进行固定,然后把保护网板插入到保护网箱内,通过固定螺钉把保护网板固定在保护网箱上,从而使用时rov本体外侧具有整体包覆式的保护网,能够在水下工作时防止水草杂物缠绕在rov本体上;
13.2、本实用新型中,通过设置的电机、第二螺纹轴和防护网板,使用过程中需要控制rov本体上的机械臂进行水下作业时,通过控制控制器控制电机转动,电机转动带动第二螺纹轴转动,第二螺纹轴转动带动防护网板滑动,把防护网板收回到保护网箱内部,然后机械臂向下伸长,从保护网箱内部伸出进行水下作业,水下作业完成后带动机械臂复位,控制电机反转带动防护网板复位封闭保护网箱,从而使用时方便rov本体上的机械臂进行水下作业。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
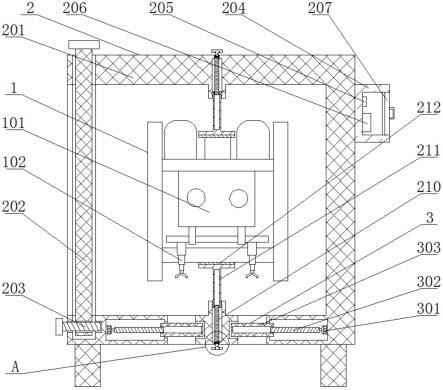
15.图1是根据本实用新型实施例的rov整体包覆式保护网的整体结构示意图;
16.图2是根据本实用新型实施例的rov整体包覆式保护网的图1的a处结构示意图;
17.图3是根据本实用新型实施例的rov整体包覆式保护网的防护网板的俯视图。
18.图中:1-rov、101-rov主体、102-机械臂、2-保护网箱组件、201-保护网箱、202-保护网板、203-固定螺钉、204-防水箱、205-控制器、206-电池、207-箱门、208-把手、209-滚珠、210-第一螺纹轴、211-限位板、212-防滑垫、3-伸缩组件、301-电机、302-第二螺纹轴、303-防护网板。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.下面,结合附图以及具体实施方式,对本实用新型做出进一步的描述:
21.实施例一:
22.请参阅图1-3,根据本实用新型实施例的rov整体包覆式保护网,包括rov1、保护网组件2和伸缩组件3,rov1包括rov本体101和机械臂102,机械臂102与rov本体101固定连接。
23.保护网组件2包括保护网箱201、保护网板202、固定螺钉203和把手208,保护网箱201右端面顶部固定连接有防水箱204,防水箱204内侧固定连接有控制器205,控制器205下方设有电池206,电池206与防水箱204固定连接,防水箱204右端面铰链连接有箱门207,把手208贯穿保护网箱201,把手208与保护网箱201转动连接,把手208的另一端固定连接有第一螺纹轴210,第一螺纹轴210外侧螺旋连接有限位板211,限位板211贯穿保护网箱201,限位板211与保护网箱201滑动连接,保护网板202贯穿保护网箱201,保护网板202与保护网箱
201滑动连接,固定螺钉203贯穿保护网箱201,固定螺钉203与保护网箱201螺旋连接,固定螺钉203贯穿保护网板202,固定螺钉203与保护网板202螺旋连接,把手208内侧嵌设有滚珠209,滚珠209贯穿把手208,滚珠209与把手208转动连接,滚珠209与保护网箱201转动连接,这种设置能够减轻把手208与保护网箱201之间的摩擦力,延长把手208的使用寿命,限位板211外侧固定连接有防滑垫212,防滑垫212与rov本体101滑动连接,防滑垫212是橡胶材质的材料制成的,这种设置对rov本体1的固定效果好。
24.使用时把rov本体101放在保护网箱201内,然后转动把手208带动第一螺纹轴210转动,第一螺纹轴210转动带动限位板211滑动,限位板211带动防滑垫212运动对rov本体101进行固定,然后把保护网板202插入到保护网箱201内,通过固定螺钉203把保护网板202固定在保护网箱201上,从而使用时rov本体101外侧具有整体包覆式的保护网,能够在水下工作时防止水草杂物缠绕在rov本体101上。
25.实施例二:
26.请参阅图1-3,根据本实用新型实施例的rov整体包覆式保护网,包括rov1、保护网组件2和伸缩组件3,rov1包括rov本体101和机械臂102,机械臂102与rov本体101固定连接。
27.伸缩组件3包括电机301,电机301与保护网箱201固定连接,电机301的主轴末端固定连接有第二螺纹轴302,第二螺纹轴302外侧螺旋连接有防护网板303,防护网板303贯穿保护网箱201,防护网板303与保护网箱201滑动连接。
28.使用过程中需要控制rov本体101上的机械臂102进行水下作业时,通过控制控制器205控制电机301转动,电机301转动带动第二螺纹轴302转动,第二螺纹轴302转动带动防护网板303滑动,把防护网板303收回到保护网箱201内部,然后机械臂102向下伸长,从保护网箱201内部伸出进行水下作业,水下作业完成后带动机械臂102复位,控制电机301反转带动防护网板303复位封闭保护网箱201,从而使用时方便rov本体101上的机械臂102进行水下作业。
29.为了方便理解本实用新型的上述技术方案,以下就本实用新型在实际过程中的工作原理或者操作方式进行详细说明。
30.在实际应用时,在使用时该设备内所有电器的电源均是由电池206提供,使用时把rov本体101放在保护网箱201内,然后转动把手208带动第一螺纹轴210转动,第一螺纹轴210转动带动限位板211滑动,限位板211带动防滑垫212运动对rov本体101进行固定,然后把保护网板202插入到保护网箱201内,通过固定螺钉203把保护网板202固定在保护网箱201上,从而使用时rov本体101外侧具有整体包覆式的保护网,能够在水下工作时防止水草杂物缠绕在rov本体101上,使用过程中需要控制rov本体101上的机械臂102进行水下作业时,通过控制控制器205控制电机301转动,电机301转动带动第二螺纹轴302转动,第二螺纹轴302转动带动防护网板303滑动,把防护网板303收回到保护网箱201内部,然后机械臂102向下伸长,从保护网箱201内部伸出进行水下作业,水下作业完成后带动机械臂102复位,控制电机301反转带动防护网板303复位封闭保护网箱201,从而使用时方便rov本体101上的机械臂102进行水下作业。
31.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1