一种基于风力推进的水上快艇的制作方法
1.本发明涉及水面航行的船技术领域,具体的说,是指一种基于风力推进的水上快艇。
背景技术:
2.根据流体力学的原理,流速越大压强越小,当密度比水大的物体掠过水面时,带动它下面的水在非常短的时间内快速流动,从而压强减小,而更下面的水是静止不动的,产生的压强大,如此就对物体产生一个压力,当压力大于物体的重力时,物体就会弹起,这样的情况重复多次,物体就会出现在水面上跳跃的情况。
3.在现实中,很多人都打过水漂,打水漂的方法是:使用较扁的材料,用拇指和中指捏住,食指在后,身体向后倾斜,手臂与身体大约呈45
°
,半蹲,瞄准后用臂膀力量发射出去,扔出去的时候用食指拨下,让其旋转着扔出,角度应为20度,2004年的nature一篇文章里介绍了打水漂的秘诀:神秘角度20
°
,这篇文章通过系统的实验发现,无论自旋角速度、抛射速度如何,石头与水面的攻角在20
°
时,石头与水面的接触时间都最少,而该接触时间决定了能量损耗的大小,接触时间越短能量损耗越少,因此20
°
角是打水漂的关键,注意这里攻角的定义是石头圆盘那个面与水面的夹角,不是入射速度方向与水面的夹角(此角度在15
°
~40
°
之间都对结果影响很小),因此得出密度远大于水的物体,不依靠自身的浮力便能够在水面上运动,因此本发明基于打水漂这一现象展开研究,设计出一款新型的水上航行的船。
4.现有技术中,大多数船只都是依靠自身浮力漂浮在水面上,因此需要一定的排水量,船体要受到很大的水体阻力,航行速度受到极大的影响,现有技术中,如气垫船,气垫船上装有几台很大的鼓风机,这些鼓风机产生的压缩空气,由船底四周的通道喷出,以很大的压力向下冲向水面,根据作用和反作用的原理,船体就得到一个方向向上的反作用力,对能源的消耗较大,为此,研发一种轻型,便捷的船只是本领域技术人员亟需解决的问题。
技术实现要素:
5.本发明所要解决的技术问题是针对上述现有技术现状,而提供一种基于风力推进的水上快艇,本发明的旋转式水上快艇,船主体能够自动旋转,带动船主体下面的水在非常短的时间内快速流动,使船主体浮于水面上,牛顿第三定律告诉我们“相互作用的两个物体之间的作用力和反作用力总是大小相等,方向相反,作用在同一条直线上”,所以当船主体旋转时,船主体也必然会对承载板产生一个反作用力矩,利用将螺旋桨排出的气体分为两股,一股用于推动整个船体向前行进,另一股来抵消船主体的反作用力,简化结构,降低成本。
6.本发明解决上述技术问题所采用的技术方案为:一种基于风力推进的水上快艇,包括船主体以及承载板,船主体上设置有承载板,承载板上设置有为船主体提供第一动力的旋转装置,第一动力能够使船主体绕承载板转动,承载板上设置有为船主体提供第二动力的推进装置,第二动力能推动船主体行进,推进
装置包括螺旋桨,螺旋桨与动力机构的传动轴连接,螺旋桨设置在涵道内,涵道上设有导气管,螺旋桨将空气从涵道及导气管输出,导气管输出的气体推力等于船主体对承载板的反作用力,从而防止承载板旋转。
7.为优化上述技术方案,采取的措施还包括:上述的导气管上设置有控制装置,控制装置能够调节从导气管排出的气体量,从而调节气体对承载板的推力,当导气管排出气体对承载板的推力大于船主体对承载板的反作用力时,承载板能够反向转动,当导气管排出气体对承载板的推力小于船主体对承载板的反作用力时,承载板正向转动,从而改变船主体行进方向。
8.上述的控制装置包括遮挡片、驱动环以及收容盘,收容盘中心设有通风口,驱动环设置在收容盘内,遮挡片设置在收容盘与驱动环之间容纳腔内,驱动环的外周上设有齿圈,导气管上固定有电机,电机的输出转轴上固定有驱动齿轮,驱动齿轮与驱动环啮合传动,驱动环旋转带动遮挡片调节收容盘的通风口大小。
9.上述的承载板的前端设置有控制把,控制把上设置有电动助力转向系统,用于执行电动助力转向操作,电动助力转向系统包括转矩/转角传感器、转向控制器,转矩/转角传感器设置在控制把的转向轴上,转矩/转角传感器、转向控制器、电机以及外置电源电连接,当控制把转动时,转矩/转角传感器会检测转矩/转角的大小,转向控制器控制电机输出相应大小和方向的助力,从而改变收容盘的通风口的大小实现转向。
10.上述的船主体的内周面上与承载板的周缘之间对应处设置有滑道,滑道内设置有滚珠。
11.上述的旋转装置包括驱动轴,驱动轴与船主体的底部中心座连接固定,驱动轴通过齿轮箱与动力机构的传动轴连接,动力机构通过齿轮箱传动带动船主体旋转。
12.上述的船主体周缘设置有密封边,密封边分别与船主体的外周面和承载板上端面搭接。
13.上述的驱动轴的上端通过轴承固定在承载板中心的连接座内。
14.上述的船主体内壁设置有加强筋,加强筋绕中心座呈辐射状排列。
15.上述的承载板上设置有承载仓,承载仓内设置有座椅以及控制台托架,控制台托架设置在承载仓前端,控制把设置在控制台托架上,承载仓的尾端设置有支架,螺旋桨设置在支架的上端,涵道固定在承载仓尾端的固定座上,动力机构为发动机,发动机固定在座椅底部的座椅腔内,螺旋桨的旋转轴上固定有机械传动的第一锥齿轮,齿轮箱的输出轴上固定安装有与第一锥齿轮相啮合的第二锥齿轮,输出轴通过齿轮箱与动力机构的传动轴连接。
16.本发明的一种基于风力推进的水上快艇,包括船主体以及承载板,船主体上设置有承载板,承载板上设置有为船主体提供第一动力的旋转装置,第一动力能够使船主体绕承载板转动,承载板上设置有为船主体提供第二动力的推进装置,第二动力能推动船主体行进,推进装置包括螺旋桨,螺旋桨与动力机构的传动轴连接,螺旋桨设置在涵道内,涵道上设有导气管,螺旋桨将空气从涵道及导气管输出,导气管输出的气体推力等于船主体对承载板的反作用力,从而防止承载板旋转,船主体能够自动旋转,带动船主体下面的水在非常短的时间内快速流动,使船主体浮于水面上,牛顿第三定律告诉我们“相互作用的两个物体之间的作用力和反作用力总是大小相等,方向相反,作用在同一条直线上”,所以当船主
体旋转时,船主体也必然会对承载板产生一个反作用力矩,利用将螺旋桨排出的气体分为两股,一股用于推动整个船体向前行进,另一股来抵消船主体的反作用力,简化结构,降低成本。
附图说明
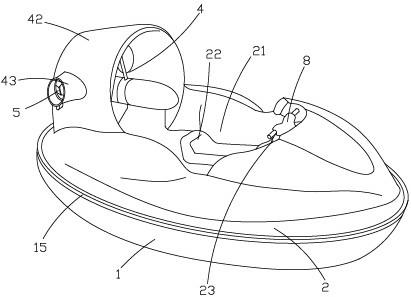
17.图1是本发明的立体结构示意图;图2是本发明的俯视图;图3是本发明的局部剖视图;图4是本发明的右视图;图5是本发明的控制装置关闭示意图;图6是本发明的控制装置打开示意图;图7是本发明的控制装置分解示意图;图8是本发明的电动助力转向系统示意图。
具体实施方式
18.以下结合附图对本发明的实施例作进一步详细描述。
19.图1至图8为本发明的结构示意图。
20.其中的附图标记为:船主体1、滑道11、滚珠12、中心座13、齿轮箱14、密封边15、加强筋16、承载板2、承载仓21、座椅22、控制台托架23、旋转装置3、驱动轴31、连接座32、推进装置4、螺旋桨41、涵道42、导气管43、支架44、旋转轴45、第一锥齿轮46、输出轴47、第二锥齿轮48、控制装置5、端盖50、遮挡片51、驱动环52、收容盘53、通槽531、通风口54、容纳腔55、滑动槽56、驱动槽57、第一导柱58、第二导柱59、动力机构6、电机7、驱动齿轮71、控制把8、转矩/转角传感器81、转向控制器82、转向轴83。
21.如图1至图8所示:一种基于风力推进的水上快艇,包括船主体1以及承载板2,船主体1上设置有承载板2,承载板2上设置有为船主体1提供第一动力的旋转装置3,第一动力能够使船主体1绕承载板2转动,船主体能够自动旋转,带动船主体下面的水在非常短的时间内快速流动,使船主体浮于水面上,从而摆脱了现有技术中,依靠排水量,使大多数船只漂浮在水面上,使船主体前进过程中受到水的阻力极大的降低,使船主体能够快速的掠过水面,承载板2上设置有为船主体1提供第二动力的推进装置4,第二动力能推动船主体1行进,推进装置4包括螺旋桨41,螺旋桨41与动力机构6的传动轴连接,螺旋桨41设置在涵道42内,本发明通过风力推动船主体1前进,使船主体越离在离开水面,风力螺旋桨仍然能够推动,使船主体跃出水面行进的距离更远,涵道42上设有导气管43,螺旋桨41将空气从涵道42及导气管43输出,导气管43输出的气体推力等于船主体1对承载板2的反作用力,从而防止承载板2旋转,牛顿第三定律告诉我们“相互作用的两个物体之间的作用力和反作用力总是大小相等,方向相反,作用在同一条直线上”,所以当船主体旋转时,船主体也必然会对承载板产生一个反作用力矩,因此需要反扭矩装置保证承载板2不会随船主体1一同旋转,本发明利用将螺旋桨41排出的气体分为两股,一股用于推动整个船体向前行进,另一股来抵消船主体的反作用力,简化结构,降低成本,同时也简化了后续船体转向结构,使转向操作更加方便快捷。
22.实施例中,导气管43上设置有控制装置5,控制装置5能够调节从导气管43排出的气体量,从而调节气体对承载板2的推力,当导气管43排出气体对承载板2的推力大于船主体1对承载板2的反作用力时,承载板2能够反向转动,当导气管43排出气体对承载板2的推力小于船主体1对承载板2的反作用力时,承载板2正向转动,从而改变船主体1行进方向,通过调节气体排出量便能够实现转向,简化结构,同时方便操作。
23.实施例中,控制装置5包括遮挡片51、驱动环52以及收容盘53,收容盘53中心设有通风口54,多个遮挡片51绕通风口54均匀分布,收容盘53的底部设有滑动槽56,滑动槽56为多边形结构,滑动槽56的边数等于遮挡片51的数目,驱动环52设置在收容盘53内,驱动环52上设有驱动槽57,遮挡片51设置在收容盘53与驱动环52之间容纳腔55内,遮挡片51上固定有第一导柱58与第二导柱59,第一导柱58与第二导柱59均与收容盘53底部的滑动槽56滑动配合,第二导柱59的外端穿置在驱动环52的驱动槽57内,驱动环52旋转,驱动槽57作用在第二导柱59上,使第一导柱58与第二导柱59沿着滑动槽56滑动,从而使遮挡片51遮挡或打开通风口54,收容盘53的端口处设有端盖50,从而保证收容盘53内部的遮挡片51与驱动环52精密配合,驱动环52的外周上设有齿圈,导气管43上固定有电机7,电机7为减速电机,电机7的输出转轴上固定有驱动齿轮71,收容盘53的外周上设有通槽531,驱动齿轮71能够穿过通槽531,驱动齿轮71与驱动环52啮合传动,驱动环52旋转带动遮挡片51调节收容盘53的通风口54大小,控制装置5结构简单,控制方便。
24.实施例中,承载板2的前端设置有控制把8,控制把8上设置有电动助力转向系统,用于执行电动助力转向操作,电动助力转向系统包括转矩/转角传感器81、转向控制器82,转矩/转角传感器81设置在控制把8的转向轴83上,转矩/转角传感器81、转向控制器82、电机7以及外置电源电连接,当控制把8转动时,转矩/转角传感器81会检测转矩/转角的大小,转向控制器82控制电机7输出相应大小和方向的助力,从而改变收容盘53的通风口54的大小实现转向,通过转动控制把8实现船体行进方向改变,控制方便简单。
25.实施例中,船主体1的内周面上与承载板2的周缘之间对应处设置有滑道11,滑道11内设置有滚珠12,能够减少船主体1的内周面与承载板2的周缘之间摩擦力,同时保证了船主体1旋转时的稳定。
26.实施例中,旋转装置3包括驱动轴31,驱动轴31与船主体1的底部中心座13连接固定,驱动轴31通过齿轮箱14与动力机构6的传动轴连接,动力机构6通过齿轮箱14传动带动船主体1旋转,简化结构,使动力机构充分作用,减少船主体的载重量。
27.实施例中,船主体1周缘设置有密封边15,密封边15分别与船主体1的外周面和承载板2上端面搭接,避免了水进入船主体1内,密封边15与船主体1的外周面搭接部分,通过粘合剂粘贴,使其牢固的结合在船主体1的外周面上。
28.实施例中,驱动轴31的上端通过轴承固定在承载板2中心的连接座32内,保证了船主体1与承载板2之间的固定同时保证了驱动轴31处于两者中轴线上。
29.实施例中,船主体1内壁设置有加强筋16,加强筋16绕中心座13呈辐射状排列,保证了运行的稳定性。
30.实施例中,承载板2上设置有承载仓21,承载仓21内设置有座椅22以及控制台托架23,控制台托架23设置在承载仓21前端,控制把8设置在控制台托架23上,承载仓21的尾端设置有支架44,螺旋桨41设置在支架44的上端,涵道42固定在承载仓21尾端的固定座上,动
力机构6为发动机,发动机固定在座椅22底部的座椅22腔内,螺旋桨41的旋转轴45上固定有机械传动的第一锥齿轮46,齿轮箱14的输出轴47上固定安装有与第一锥齿轮46相啮合的第二锥齿轮48,输出轴47通过齿轮箱14与动力机构6的传动轴连接,控制台托架23上设置有仪表盘,便于显示行进的速度及发动机油耗等情况,控制台托架23托架上设有控制发动机的点火装置,控制装置为现有技术,不再重复叙述。
31.本发明的使用方法:发动机启动,带动旋转装置以及推进装运行,旋转装置提供第一动力能够使船主体绕承载板转动,船主体能够自动旋转,带动船主体下面的水在非常短的时间内快速流动,使船主体浮于水面上,螺旋桨排出的气体分为两股,一股从涵道处输出用于推动整个船体向前行进,另一股从导气管处输出,来抵消船主体的反作用力,因此能够阻止承载板旋转,推进装置的螺旋桨旋转,将空气通过涵道输送到快艇后方,推动船主体前进,通过转动控制把转向,控制把转动时,转矩/转角传感器会检测转矩/转角的大小,转向控制器控制电机输出相应大小和方向的助力,电机的驱动齿轮与驱动环啮合传动,带动驱动环旋转,使遮挡片遮挡或打开通风口,调节收容盘的通风口大小,实现相应的转向,转向完成后,控制把回正,通风口输出的气体推力等于船主体对承载板的反作用力,从而防止承载板旋转,船体沿着改变后的方向行进。
32.本发明的最佳实施例已阐明,由本领域普通技术人员做出的各种变化或改型都不会脱离本发明的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1