一种基于海扁虫运动形态仿生的水下勘探机器人
1.本发明涉及水下仿生机器人技术领域,具体为一种基于海扁虫运动形态仿生的水下勘探机器人。
背景技术:
2.近年来,随着水下各种资源的开发、水下生物科考探索、水下管道探测和巡检等等领域对水下机器人的需求日益增长,水下机器人的研究得到快速发展。
3.传统的水下机器人多采用螺旋桨作为推进方式,但是该方式仍存在不足之处:在复杂的水体环境中工作时,螺旋桨容易被杂物缠绕,导致堵转;螺旋桨运作时,会有较大的尾流以及噪声,隐蔽性较差,无法很好的胜任水下科考以及一些侦察任务。
技术实现要素:
4.本发明的目的在于提供一种基于海扁虫运动形态仿生的水下勘探机器人,通过改进结构设计和运动控制,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种基于海扁虫运动形态仿生的水下勘探机器人,包括头部密封舱和凸轮关节,所述头部密封舱,所述头部密封舱右侧固定连接有摄像头,所述摄像头前侧和后侧均设置有水下红外探头,所述摄像头左侧固定连接有头部密封舱,所述头部密封舱顶部固定连接有防水舵机,所述防水舵机顶部设置有柔性主体骨架。
7.所述柔性主体骨架左侧固定连接有电机舱,所述电机舱左侧固定连接有尾部密封舱,所述尾部密封舱左侧固定连接有软轴连接头,所述摄像头设置于软轴连接头右侧。
8.优选的,所述凸轮关节前侧滑动连接有滑动轴承,所述凸轮关节右侧固定连接有骨架关节,所述骨架关节表面套接有延长杆,所述延长杆表面固定连接有软轴,所述软轴内圈固定连接有弹簧。
9.优选的,所述柔性主体骨架由多个相同的骨架关节、凸轮关节、弹簧、软轴、软轴连接头、还有位于机器人头部的防水舵机以及贯穿整体的细尼龙绳组成,每个关节中的凸轮关节通过软轴连接,骨架关节与凸轮关节同步安装,每两个骨架关节之间安装有一个弹簧作为支撑,细尼龙线先缠绕在舵机盘上,然后穿过每一个骨架关节,通过舵机盘旋转。
10.优选的,所述水下机器人运动的波动式仿生推进系统由多组凸轮关节、摆杆、延长杆、两侧连接每组凸轮摆杆机构的硅胶薄膜以及两个直流减速电机组成,每组凸轮关节按照90
°
的相位角差值进行排列,以至于摆杆呈现一定的波浪式分布,并且左右两列为镜像分布,电机的扭矩通过多组软轴14传递到每组的凸轮摆杆机构上。
11.优选的,所述软轴连接头分为三部分工作段,凸轮关节两边各设置有一个正方形的孔,软轴连接头的第一工作段为与凸轮关节相配合的正方形凸起,两者采用过盈配合,软轴连接头的第二工作段为5mm的圆柱区域,用于与滑动轴承配合旋转(由于体积有限采用滑动轴承),两者为间隙配合。
12.优选的,所述软轴连接头的第三工作段为一段过渡圆弧,软轴为在中心钢丝上螺旋缠绕4~5层钢丝且相邻各层钢丝捻向相反的钢丝。
13.优选的,所述头部密封舱中设置有左右两个红外探头和中部的防水舵机,红外探头和防水舵机的电源线、信号线、地线通过每一个关节预设的走线孔进入尾部密封舱。
14.优选的,所述水下机器人运动的电力控制系统由l298n电机驱动模块、12v锂电池、lm2598降压模块、主控stm32单片机、两个为运动提供动力的减速电机、一个用于控制上下方向的舵机组成,减速电机通过l298n电机驱动模块与主控连接,利用12v电源与lm2598降压模块为减速电机提供12v电压,为舵机提供5v额定电压。
15.优选的,所述水下机器人运动的图像传输系统由摄像头ov26402、芯片esp32以及wifi无线通讯模块组成,通过摄像头ov26402进行图像信号的采集并传输给esp32芯片,最后通过wifi无线通讯模块传送到计算机进行显示,最终使得整个系统可远程观测水底的状况。
16.优选的,所述感受水下机器人姿态变化以及调整运动姿态的运动控制系统由九轴蓝牙陀螺仪角度传感器、stm32单片机、舵机、两个直流电机组成,水下机器人运动的红外防碰撞系统由一对左右对称布置的红外探头和中央处理芯片stm32f103组成。
17.与现有技术相比,本发明提供的基于海扁虫运动形态仿生的水下勘探机器人,具备以下有益效果:
18.1、该基于海扁虫运动形态仿生的水下勘探机器人,通过改进结构设计和运动控制,该外机器人主体骨架还使用了基于脊柱形态仿生的机器人柔性骨架技术,提高机器人的灵活性,使之能在狭窄地形灵活穿梭,另外还搭载了摄像头、水下红外探头、九轴陀螺仪,可以满足水下多种勘探和记录任务的需求,模仿鳐鱼胸鳍或者长背鳍鱼类的波动式推进方式,采用波动式推进,所以使得横向力相抵消,机动性和稳定性相对更好,适合在狭窄复杂地形中游动。
19.2、本发明根据推进方式的不同主要分为两种,一是模仿鱼类用尾巴进行摆动式推进,另一种是模仿鳐鱼胸鳍或者长背鳍鱼类的波动式推进方式,前者的推进效率相对较高,而后者由于采用波动式推进,所以使得横向力相抵消,机动性和稳定性相对更好,适合在狭窄复杂地形中游动。本发明可模仿自然界中的海扁虫波动式的推进方式,两侧柔性波动鳍以波动式的运动,与水作用产生的推力,并且该种推进方式可以抵消大部分鳍面两侧的作用力,提高运作时的稳定性。
附图说明
20.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图:
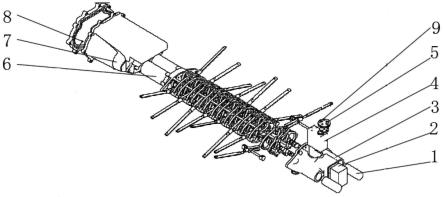
21.图1为本发明实施例水下勘探机器人的整体外形结构整体示意图;
22.图2为本发明实施例水下勘探机器人的凸轮摆杆机构高副低代的机构简图;
23.图3为本发明实施例水下勘探机器人的k值对振幅与急回特性的影响示意图;
24.图4为本发明实施例水下勘探机器人的k值对振幅与急回特性的影响示意图;
25.图5为本发明实施例水下勘探机器人的部分装配结构示意图;
26.图6为本发明实施例水下勘探机器人的滑动轴承结构示意图;
27.图7为本发明实施例水下勘探机器人的凸轮关节结构示意图;
28.图8为本发明实施例水下勘探机器人的电机舱结构示意图。
29.图中:1、水下红外探头;2、摄像头;3、头部密封舱;4、防水舵机;5、舵机盘;6、电机舱;7、尾部密封舱;8、软轴连接头;9、柔性主体骨架;10、凸轮关节;11、摆杆;12、延长杆;13、骨架关节;14、软轴;15、弹簧;16、滑动轴承。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.请参阅图1-8,本发明实施例提供的基于海扁虫运动形态仿生的水下勘探机器人,包括头部密封舱3和凸轮关节10,头部密封舱3,头部密封舱3右侧固定连接有摄像头2,摄像头2前侧和后侧均设置有水下红外探头1,摄像头2左侧固定连接有头部密封舱3,头部密封舱3顶部固定连接有防水舵机4,防水舵机4顶部设置有柔性主体骨架9。
32.柔性主体骨架9左侧固定连接有电机舱6,电机舱6左侧固定连接有尾部密封舱7,尾部密封舱7左侧固定连接有软轴连接头8,摄像头2设置于软轴连接头8右侧,凸轮关节10前侧滑动连接有滑动轴承16,凸轮关节10右侧固定连接有骨架关节13,骨架关节13表面套接有延长杆12,延长杆12表面固定连接有软轴14,软轴14内圈固定连接有弹簧15,柔性主体骨架9由多个相同的骨架关节13、凸轮关节10、弹簧15、软轴14、软轴连接头8、还有位于机器人头部的防水舵机4以及贯穿整体的细尼龙绳组成,每个关节中的凸轮关节10通过软轴14连接,骨架关节13与凸轮关节10同步安装,每两个骨架关节13之间安装有一个弹簧15作为支撑,细尼龙线先缠绕在舵机盘5上,然后穿过每一个骨架关节13,通过舵机盘5旋转,水下机器人运动的波动式仿生推进系统由多组凸轮关节10、摆杆11、延长杆12、两侧连接每组凸轮摆杆机构的硅胶薄膜以及两个直流减速电机组成,每组凸轮关节10按照90
°
的相位角差值进行排列,以至于摆杆11呈现一定的波浪式分布,并且左右两列为镜像分布,电机的扭矩通过多组软轴14传递到每组的凸轮摆杆机构上,软轴连接头8分为三部分工作段,凸轮关节10两边各设置有一个正方形的孔,软轴连接头8的第一工作段为与凸轮关节10相配合的正方形凸起,两者采用过盈配合,软轴连接头8的第二工作段为5mm的圆柱区域,用于与滑动轴承16配合旋转(由于体积有限采用滑动轴承16),两者为间隙配合,软轴连接头8的第三工作段为一段过渡圆弧,软轴14为在中心钢丝上螺旋缠绕4~5层钢丝且相邻各层钢丝捻向相反的钢丝,头部密封舱3中设置有左右两个红外探头1和中部的防水舵机4,红外探头1和防水舵机4的电源线、信号线、地线通过每一个关节预设的走线孔进入尾部密封舱7。
33.水下机器人运动的电力控制系统由l298n电机驱动模块、12v锂电池、lm2598降压模块、主控stm32单片机、两个为运动提供动力的减速电机、一个用于控制上下方向的舵机4组成,减速电机通过l298n电机驱动模块与主控连接,利用12v电源与lm2598降压模块为减速电机提供12v电压,为舵机提供5v额定电压,水下机器人运动的图像传输系统由摄像头
ov26402、芯片esp32以及wifi无线通讯模块组成,通过摄像头ov26402进行图像信号的采集并传输给esp32芯片,最后通过wifi无线通讯模块传送到计算机进行显示,最终使得整个系统可远程观测水底的状况,感受水下机器人姿态变化以及调整运动姿态的运动控制系统由九轴蓝牙陀螺仪角度传感器、stm32单片机、舵机4、两个直流电机组成,水下机器人运动的红外防碰撞系统由一对左右对称布置的红外探头1和中央处理芯片stm32f103组成,机器人波动式仿生推进系统中的两侧鳍面采用的是0.2mm的硅胶薄膜,每一个子关节包括有左右两根延长杆12,延长杆12为高精度光敏树脂材料3d打印而成,中间有0.5mm的缝隙,上下部分可以夹住硅胶薄膜,并且设置有两个2mm的通孔,可以安装两枚2mm的螺丝以及配套螺母用于固定,末端则直接与凸轮摆杆机构中的摆杆11过盈配合,并且每个子关节之间的硅胶薄膜留有褶皱,避免幅值差值过大导致薄膜应力过大而增加转轴的载荷,同时还可以更好的形成预想的波形。
34.如图5、6所示,软轴连接头8分为三部分工作段,凸轮关节10两边各设置有一个正方形的孔,软轴连接头8的第一工作段为与凸轮关节10相配合的正方形凸起,两者采用过盈配合,软轴连接头8的第二工作段为5mm的圆柱区域,用于与滑动轴承16配合旋转(由于体积有限采用滑动轴承11),两者为间隙配合,软轴连接头8的第三工作段为一段过渡圆弧,一是为了减轻整体弯曲时软轴连接头8与关节一侧正压力增加而导致的摩擦力增大的现象,二是起到限位作用,软轴14为在中心钢丝上螺旋缠绕4~5层钢丝且相邻各层钢丝捻向相反的钢丝束,如图7所示,打磨掉软轴14表面的油膜涂层之后,软轴14插进软轴连接头8预留的方孔中,然后灌入ab胶水填充四个角的缝隙,待凝固之后软轴14的一端形成胶质方轴,防止过载时胶水将软轴连接头10内孔表面的一层光敏树脂粘至脱落,头部密封舱3中设置有左右两个红外探头1和中部的防水舵机4,由于摄像头ov26402采用独立电源,并且摄像头ov26402进行图像信号的采集之后传输给esp32芯片,最后通过wifi无线通讯模块传送到计算机进行显示,不需要另外走线,红外探头1和防水舵机4的电源线、信号线、地线通过每一个关节预设的走线孔进入尾部的密封舱。
35.如图8所示,两个电机安装在电机密封舱中,电机密封舱的舱盖中设置有三道密封圈凹槽,o型密封圈安装与这几道凹槽中,电机轴从中间穿过,三道密封圈保证电机轴在转动时不会进水,电机密封舱末端设置有两个小孔用于电机电源线的走线,在安装好电机之后,灌入胶水密封这两个小孔,尾部密封舱7一共有4处开口位置,其中最大的开口用于模块的安装,并且此处与舱盖采用法兰密封,另外的3处小开口分别是2处电机的电源线和1处头部的舵机和红外探头1的引线,完成走线之后,剩余的3处开口采用防水胶密封,水下机器人运动的电力控制系统由l298n电机驱动模块、12v锂电池、lm2598降压模块、主控stm32f103、两个为运动提供动力的减速电机、一个用于控制上下方向的舵机组成,舵机与减速电机通过l298n电机驱动模块与主控连接,利用12v电源与lm2598降压模块为减速电机提供12v额定电压,为舵机提供5v额定电压,其中通过主控提供不相同的电压占空比信号来实现控制减速动机实现不同的运转速度与舵机旋转的不同角度以达到水下勘探机器人不同的前进速度以及前进方向的控制,其中的stm32f103发送不同占空比的电压信号通过电机驱动模块传输给两个减速电机以及舵机,水下机器人运动的图像传输系统由摄像头ov26402、芯片esp32以及wifi无线通讯模块组成,通过摄像头ov26402进行图像信号的采集并传输给esp32芯片,最后通过wifi无线通讯模块传送到计算机进行显示,最终使得整个系统可远程
观测水底的状况,感受水下机器人姿态变化以及调整运动姿态的运动控制系统由九轴蓝牙陀螺仪角度传感器、stm32f103、舵机、两个直流电机组成,在姿态控制方面我们采用的是蓝牙九轴陀螺仪角度传感器,该传感器静态姿态测量的精度能够达到0.05度,通过陀螺仪与单片机的蓝牙连接,把水下勘探机器人的姿态测量数据传回单片机处理,而单片机通过pid的闭环控制将角度调整到预设的数据,在水下勘探机器人开机时我们会对当前的姿态做初始化处理,定义此时为初始状态,之后的姿态是与初始状态的差值设置,一旦与预设状态不一致时单片机将通过pwm信号控制舵机以及电机自适应调整机器人的姿态,以达到预设效果,水下机器人运动的红外防碰撞系统由一对左右对称布置的红外探头1和中央处理芯片stm32f103组成,其原理在于通过红外探头1检测前方的障碍情况,当前方有障碍物阻挡光线时,探头将传回一个高电平,最终使得芯片能够自主识别前方障碍物的情况并配合运动系统进行自主避障。
36.在实际操作过程中,当此装置使用时,当需要实现前进功能时,电机正转,硅胶薄膜产生一个接一个向尾部运动的波形,将薄膜内的水向后推,使整体借助反作用力向前游动。若要实现后退功能,则电机反转,硅胶薄膜产生一个接一个向头部运动的波形,将薄膜内的水向前推,使整体借助反作用力向后游动;
37.当需要实现左转功能时,设置右侧电机的转速高于左侧电机,使得右侧波形的运动速率比左侧波形的运动速率更快,即差速转向,若要实现右转功能,只需设置左侧电机的转速高于右侧电机即可。
38.当需要实现上升功能时,控制舵机正转90
°
,舵机上的舵机盘5连接有两根尼龙丝,右侧尼龙丝贯穿整体柔性关节的上半部分,左侧尼龙丝贯穿整体柔性关节的下半部分,舵机盘5作正转时牵拉右侧尼龙丝,放松左侧尼龙丝,达到压缩上半部分关节间距而扩大下半部分关节间距的目的,即实现使整体向上弯曲的功能,同时两侧电机都正向转动,产生斜向上的合力,最终实现上升功能,若要实现下潜功能,需要控制舵机反转90
°
,此时舵机盘5作牵拉左侧尼龙丝,放松右侧尼龙丝,达到压缩下半部分关节间距而扩大上半部分关节间距的目的,即实现使整体向下弯曲的功能,同时两侧电机都正向转动,产生斜向下的合力,最终实现下潜功能。
39.当需要实现左翻转功能时,需要控制舵机正转90
°
,使整体向上弯曲,同时设置右侧电机的转速高于左侧电机,产生向左的转矩与斜向上的合力,最终实现左翻转功能,若要实现右翻转功能,则需要在控制舵机正转90
°
的基础上再设置左侧电机的转速高于右侧电机,产生向右的转矩与斜向上的合力,最终实现右翻转功能。
40.本发明通过改进结构设计和运动控制,使该机器人可模仿自然界中的海扁虫波动式的推进方式,两侧柔性波动鳍以波动式的运动,与水作用产生的推力,并且该种推进方式可以抵消大部分鳍面两侧的作用力,提高运作时的稳定性,除此之外机器人主体骨架还使用了基于脊柱形态仿生的机器人柔性骨架技术,提高机器人的灵活性,使之能在狭窄地形灵活穿梭,另外还搭载了摄像头、水下红外探头、九轴陀螺仪,可以满足水下多种勘探和记录任务的需求,模仿鳐鱼胸鳍或者长背鳍鱼类的波动式推进方式,采用波动式推进,所以使得横向力相抵消,机动性和稳定性相对更好,适合在狭窄复杂地形中游动。
41.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存
在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个......”限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1