一种基于救生圈弹射设备的锁紧机构的制作方法
1.本发明涉及一种救生圈辅助设备,特别是一种基于救生圈弹射设备的锁紧机构。
背景技术:
2.随着技术的发展,目前的船舶均配备有水面救援设备和智能救生圈,该智能救生圈可在进入海面后自动推进并朝落水人员方向移动,然后在接触到落水人员自动返回船舶,从而实现自动救援功能,有效提高对落水人员救援效率。为了实现对智能救生圈的安装和充电,船舶四周还需设置救生圈弹射设备,智能救生圈在日常状态下固定在弹射设备的底部并持续充电;一旦出现落水事件时,由弹射设备松开智能救生圈使其自然落入下方水面并实施救援。
3.目前的救生圈弹射设备如专利202120782157.x所示,包括电控部分和支撑部分,其中支撑部分由前后分布的三组挂钩,三组挂钩分别连接驱动件实现伸缩功能,使得智能救生圈在安装时由三组挂钩同时收缩对其进行夹持,当智能救生圈在使用时,三组挂钩在驱动件作用下一同收缩解锁,使智能救生圈失去限位后在重力作用下自然下落。但该结构在实际使用时却存在两方面缺陷:第一是当智能救生圈使用完成后重新安装复位时,需要由处理人员先将智能救生圈的上端扣合限位块实现定位,同时将救生圈弹射设备的充电头和智能救生圈的充电口相互插接;再由充电头在检测到救生圈连接后控制挂钩伸出进行夹持。而这就使得智能救生圈在插电过程中并无法利用挂钩进行支撑,同时智能救生圈还需保持完全水平的状态才能实现插接,导致目前的智能救生圈需要由两名处理人员相互配合才能完成安装,即一名安装人员托举智能救生圈的头部,另一名安装人员托举智能救生圈的尾部,两者控制智能救生圈在水平状态下移动至限位块相互对齐并扣合后才能实现救生圈和充电头的插接,从而增加了对智能救生圈的安装难度。
4.而第二个缺陷在于,由于智能救生圈的前端在日常夹持状态下会和充电头相互插接进行充电,在弹出时则由三组挂钩同时收缩使智能救生圈在重力作用下和充电头相互分离自然下落。这使得当智能救生圈在下落时,智能救生圈的后端会在失去限位后直接下落,智能救生圈的前端会受到充电头和限位块的阻碍形成滞后,导致智能救生圈并无法以水平状态完成下落,而是会在下落瞬间形成前高后低的轻微倾斜;该状态则会造成智能救生圈在倾斜时对充电头和限位块的挤压,不仅容易导致智能救生圈在该位置的受力变形,并且充电头和智能救生圈在接电位置还存在受损的可能性,降低了智能救生圈的后续充电稳定性。
5.因此,现有的救生圈弹射设备存在安装困难,充电部位容易受损的问题。
技术实现要素:
6.本发明的目的在于,提供一种基于救生圈弹射设备的锁紧机构。它能够降低对智能救生圈的安装难度,并使智能救生圈在下落时以水平状态脱离充电头,避免充电部位的挤压受损。
7.本发明的技术方案:一种基于救生圈弹射设备的锁紧机构,包括安装架,安装架的前端连接有前挂钩,前挂钩的一侧分别设有连接安装架的充电头和定位杆,充电头和安装架之间滑动连接且相互扣合,安装架的后端设有对称的两个后挂钩,前挂钩的上方连接有第一锁紧组件,后挂钩的上方连接有第二锁紧组件;所述后挂钩包括对称设置的两个限位片,限位片的外形为v形,两个限位片之间形成扣合腔,限位片的上端转动连接安装架;所述第一锁紧组件和第二锁紧组件均包括推拉杆,推拉杆的一端穿过前挂钩或后挂钩并连接有第一弹性件,推拉杆的另一端连接有升降架,升降架的上端滑动连接安装架,升降架的外部连接有驱动机构,第二锁紧组件的升降架下端延伸至扣合腔内。
8.前述的一种基于救生圈弹射设备的锁紧机构中,所述定位杆的外形为圆柱形,定位杆滑动连接安装架且和安装架在连接处设有第二弹性件。
9.前述的一种基于救生圈弹射设备的锁紧机构中,所述限位片的下端设有圆弧形的扩张部。
10.前述的一种基于救生圈弹射设备的锁紧机构中,所述前挂钩的外形为v形,前挂钩的上端转动连接安装架,所述第一锁紧组件的推拉杆在前挂钩的远离第一弹性件一侧设有顶推板。
11.前述的一种基于救生圈弹射设备的锁紧机构中,所述驱动机构包括驱动板,驱动板的两端分别连接第二锁紧组件的两个升降架,驱动板的中部连接有第一驱动件;所述第一锁紧组件的升降架上连接有第二驱动件。
12.前述的一种基于救生圈弹射设备的锁紧机构中,所述定位杆的下端侧部设有控制开关。
13.与现有技术相比,本发明具有以下特点:
14.(1)本发明通过前挂钩、后挂钩、第一锁紧组件和第二锁紧组件的配合,使得处理人员在安装时,能够先将智能救生圈的前端放置在前挂钩上,然后托举智能救生圈的后端支脚使其扣入扣合腔内;当智能救生圈进入扣合腔后,通过第一弹性件和限位片的配合能够对智能救生圈进行支撑,使智能救生圈在前挂钩和后挂钩的配合下处于托举状态;此时处理人员能够将智能救生圈横移至扣合定位杆并触发控制开关,进而使各升降架能够同时上升并带动前挂钩和后挂钩进行收缩,使前挂钩和后挂钩在收缩到位后将智能救生圈托举至水平状态并锁紧;最后由处理人员将充电头插入智能救生圈完成安装,降低了对智能救生圈的安装难度;
15.(2)当智能救生圈在使用时,第一锁紧组件和第二锁紧组件的升降架同时下降对智能救生圈的上端面进行顶推,使智能救生圈在顶推作用下水平下移并造成前挂钩和后挂钩的挤压张开,从而使智能救生圈在下移过程中和充电头相互分离,避免充电部位在智能救生圈下落时的弯折受损;当前挂钩和后挂钩被顶推至张开状态时,智能救生圈则能够在失去托举后自然下落,实现对智能救生圈的弹出;
16.所以,本发明能够降低对智能救生圈的安装难度,并使智能救生圈在下落时以水平状态脱离充电头,避免充电部位的挤压受损。
附图说明
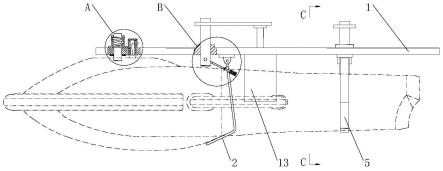
17.图1是本发明的结构示意图;
18.图2是图1的a向放大图;
19.图3是图1的b向放大图;
20.图4是图1的c向视图;
21.图5是后挂钩在锁紧状态下的结构示意图;
22.图6是后挂钩在张开状态下的结构示意图。
23.附图中的标记为:1-安装架,2-前挂钩,3-充电头,4-定位杆,5-后挂钩,6-推拉杆,7-第一弹性件,8-升降架,9-第二弹性件,10-顶推板,11-驱动板,12-第一驱动件,13-第二驱动件,501-限位片,502-扣合腔,503-扩张部。
具体实施方式
24.下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
25.实施例。一种基于救生圈弹射设备的锁紧机构,构成如图1所示,包括安装架1,安装架1的前端连接有前挂钩2,前挂钩2的一侧分别设有连接安装架1的充电头3和定位杆4,充电头3和安装架1之间滑动连接且相互扣合,安装架1在充电头3的上端设有供处理人员操作的开口,处理人员能够将手伸入开口内并对充电头3进行按压使充电头3和智能救生圈相互插接;安装架1的后端设有对称的两个后挂钩5,前挂钩2的上方连接有第一锁紧组件,后挂钩5的上方连接有第二锁紧组件;所述后挂钩5包括对称设置的两个限位片501,限位片501的外形为v形,两个限位片501之间形成扣合腔502,限位片501的上端转动连接安装架1;所述第一锁紧组件和第二锁紧组件均包括推拉杆6,推拉杆6的一端穿过前挂钩2或后挂钩5并连接有第一弹性件7,该第一弹性件7可选用压簧,推拉杆6的另一端连接有升降架8,升降架8的上端滑动连接安装架1,升降架8的外部连接有驱动机构,第二锁紧组件的升降架8下端延伸至扣合腔502内。
26.所述定位杆4的外形为圆柱形,定位杆4滑动连接安装架1且和安装架1在连接处设有第二弹性件9,第二弹性件9可选用压簧,智能救生圈的上端面在安装后扣合连接定位杆。
27.所述限位片501的下端设有圆弧形的扩张部503。
28.所述前挂钩2的外形为v形,前挂钩2的上端转动连接安装架1,所述第一锁紧组件的推拉杆6在前挂钩2的远离第一弹性件7一侧设有顶推板10。
29.所述驱动机构包括驱动板11,驱动板11的两端分别连接第二锁紧组件的两个升降架8,驱动板11的中部连接有第一驱动件12;所述第一锁紧组件的升降架8上连接有第二驱动件13;所述第一驱动件12和第二驱动件13可选用电动缸或电动推杆,其伸缩位置由低到高依次分为低位、中间位和高位,当杆头处于低位时,前挂钩2和后挂钩5完全张开并解除对智能救生圈的限位;当杆头处于中间位时,前挂钩2和后挂钩5处于自然状态并随外力进行转动;当杆头处于高位时,前挂钩2和后挂钩5处于收缩状态并对智能救生圈进行锁紧。
30.所述定位杆4的下端侧部设有控制开关,该控制开关可选用接近开关或按钮开关,当智能救生圈上的定位槽和定位杆4相互扣合时,控制开关触发并控制第一驱动件12和第二驱动件13动作。
31.本发明的工作原理:当智能救生圈在使用完成后需要重新安装至弹射设备时,处理人员先当智能救生圈的前端放置在前挂钩2上,然后将智能救生圈后端的两侧支脚向上
抬升使其扣入后挂钩5内。通过限位片501、扩张部503和第一弹性件7的配合,使得支脚至从下往上挤压时能够带动两侧限位片501自动张开,并使支脚在扣入扣合腔502由限位片501在第一弹性件7的回弹作用下重新复位,对智能救生圈的两侧支脚进行支撑。而在上述配合下,智能救生圈在前挂钩2和后挂钩5托举后能够完成初步限位,避免智能救生圈在失去人力支撑后的掉落。此时处理人员可纵向调整智能救生圈的水平位置使智能救生圈的定位槽扣合定位杆4,定位杆4在之前的操作过程中可随智能救生圈外表面的挤压做配合收缩,当智能救生圈移动至扣合位置时,定位杆4在第二弹性件9的作用下扣入定位槽内实现对智能救生圈的定位并触发控制开关,使得控制开关在触发后控制第一驱动件12和第二驱动件13同时动作。
32.第一驱动件12在动作时,经驱动板11同时控制两侧第二锁紧组件的升降架8上升,使得升降架8在上升过程中分别带动推拉杆6进行旋转和上移,并由推拉杆6在移动过程中经第一弹性件7对限位片501进行压紧,使得限位片501能够随之转动到位,实现对支脚的高度定位。当升降架8移动到位后,限位片501在推拉杆6的限位下完全收缩并锁紧,防止智能救生圈在存放过程中的掉落。同理,前挂钩2在第二驱动件13、第一弹性件7、推拉杆6和升降架8的作用下收缩到位,对智能救生圈的前端进行高度限位并锁紧,同时配合定位杆4对智能救生圈的水平位置进行限位,使得智能救生圈在上述配合下被完全夹持固定,保证其锁定效果。充电头3在之前的安装过程中可随智能救生圈的外表面进行配合升降,当智能救生圈固定后,处理人员从顶部按压充电头3,使得充电头3和智能救生圈的充电口相互插接实现充电;插接过程中智能救生圈能够在限位结构配合下保持水平状态和位置稳定性,从而有效防止插接部位的错位,提高其接电稳定性。
33.当智能救生圈在弹出时,由第一锁紧组件和第二锁紧组件的升降架8同时下压对智能救生圈进行顶推,使得智能救生圈在顶推作用下能够以水平状态向下移动并和充电头3相互分离,从而避免接电位置的弯折受损。同时,第二锁紧组件的升降架8在下降过程中会带动推拉杆6伸出并解除对后挂钩5的限位,使得智能救生圈的支脚在下降过程中能够带动两侧限位片501张开实现分离动作。而第一锁紧组件的升降架8在下降时则会带动推拉杆6伸出,一方面解除对前挂钩2的转动限位,使智能救生圈在下降时能够将前挂钩2挤压张开;另一方面顶推板10在推拉杆6伸出后还会对前挂钩2进行挤压使其进一步张开,从而避免前挂钩2在受压时的卡滞。在智能救生圈的初始下降过程中,定位杆4还会在第二弹性件9作用下还会配合伸出并保持和定位槽的相互扣合,从而在接电位置的分离过程中对智能救生圈进行持续限位,使智能救生圈直线下落。当智能救生圈完全分离并下落后,控制开关重新触发并带动锁紧机构复位,从而方便对智能救生圈的后续安装。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1