一种智能嵌套螺旋式人工微型游泳机器人
1.本发明属于微型机器人领域,具体涉及一种智能嵌套螺旋式人工微型游泳机器人。
背景技术:
2.人工微型游泳机器人灵感来源于自然产生的游动微生物(如细菌),这种微型游泳器为未来的生物医学应用提供了广阔的前景,如靶向药物输送、显微外科手术、生物电子学等。为了实现在充满流动性液体的有限空间内顺利移动,微型游泳机器人必须产生足够的推力来克服流体的阻力和与边界的摩擦力。针对不同复杂环境,微型机器人需要具备可重构性和环境敏感性,通过自身结构的变化来改善运动和功能方面的适应性。然而,到目前为止,大多数人造微型游泳机器人只能在固定步态下进行相对简单的动作,推进速度慢,其峰值约为40mm/秒;对外部环境不敏感,无法对外界环境的刺激做出响应,例如声、光、热、ph值等,这都降低了微型游泳机器人的实用性,削弱了其在特殊环境中的灵活性。为了实现高效稳定推进环境响应式微型游泳机器人,更需要从结构设计和材料入手进行游泳性能的改进。
技术实现要素:
3.本发明的目的是为了解决现有微型游泳机器人推进速度慢以及环境适应性差的问题,提供一种智能嵌套螺旋式人工微型游泳机器人,在保证稳定性和恢复力维持现有水平的基础上,通过嵌套结构设计以及形状记忆聚合物的结合,实现自适应结构-环境交互以及游泳运动性能大幅度提升,降低对外加驱动装置的依赖性。
4.本发明的目的是通过以下技术方案实现的:
5.一种智能嵌套螺旋式人工微型游泳机器人,所述机器人包括刚性头部、头尾连接段、外层螺旋尾、内层螺旋尾、驱动电机,其中:
6.所述头部内放置微型驱动电机,为微型游泳机器人运动提供初始驱动力;
7.在所述头尾连接段,外层螺旋尾与内层螺旋尾存在充分接触、紧密粘接部分,内层螺旋尾与头部充分接触、紧密粘接,使得整体在运动过程中不发生局部脱粘等损坏,所述外层螺旋尾为直径逐渐增大的螺旋结构,所述内层螺旋尾为直径一致的螺旋结构,所述内层螺旋尾具有形状记忆功能。
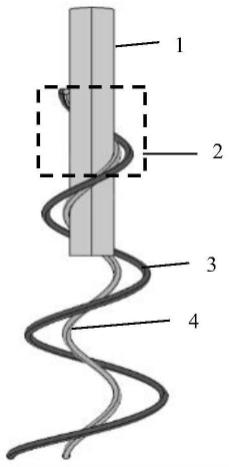
8.头部与嵌套螺旋尾之间完全粘接,嵌套螺旋尾截面为圆形,半径为0.09mm,螺旋半径为0.74mm,中间留有0.01mm的空隙作为完全粘接的间隙。在仿真建模过程中,实际设置中需要预留间隙,防止划分网格时出现面的交集、网格报错;在实验制备过程中,预留微小尺寸可以为头和嵌套螺旋尾的胶粘预留一定空间,使整体更容易实现良好粘接。所述头部与层级螺旋尾中间包含连接过渡段,在仿真计算过程中头部与尾之间为完全绑定连接,连接部分为半径一致的螺旋线。图1为smp螺旋尾未展开的初始状态,其中头尾连接段为层级螺旋尾初始段,依旧采用半径一致的螺旋线设计,保证头、尾之间的正常连接,避免虚接触、运
动过程头尾分离。
9.进一步地,所述头尾连接段的外层螺旋尾与内层螺旋尾一体制成。
10.进一步地,所述内层螺旋尾的材料为形状记忆聚合物smp。
11.进一步地,所述内层螺旋尾采用环氧树脂/正辛胺/间苯二甲胺质量配比为1:0.1646:0.0868制成,其整体长度为13.5~16.5mm(形状记忆变化前的初始长度)。本发明中外层螺旋尾可采用纯树脂材料或者树脂+芳纶纤维制造。
12.进一步地,所述内层螺旋尾的展开温度为63~100℃。
13.进一步地,所述头部采用金属镍或热膨胀缩醛树脂材料掺杂磁性粒子制成,采用圆柱构型。
14.进一步地,所述外层螺旋尾截面为圆形,整体径向半径逐渐增大,初始螺旋半径为r1,径向半径为rh,最大半径r2由以下方程表示,其中n为螺旋的圈数:r2=r1+nrh,实验和仿真中采用n=3的设计。
15.进一步地,所述微型游泳机器人适用环境为低雷诺系数流体环境。所述微型游泳机器人体外模拟环境为硅油流场,流体运动为平流伴随旋转,整体环境为低雷诺系数流体环境。使用硅油是为创造低雷诺流场环境,模拟生物体内血液,本发明涉及的雷诺系数为0.814。低雷诺数为进行平流层等效创造条件,是本发明背景理论简化stokes方程成立的前提。
16.进一步地,通过结构设计和材料选取,外层螺旋尾保持初始形态,内层螺旋尾在温度驱动下展开;或嵌套式螺旋机器人整体径向膨胀,指图3中这种整体半径增大的情况,增大半径,以上方案针对不同应用环境的速度水平要求选择一种,或者多种配合使用进行集群式机器人系统设计。
17.相比于现有技术,本发明具有如下优点:
18.1、嵌套螺旋式结构设计能从自身出发,通过结构的组合设计,提供更大的推进动力,减轻游泳机器人对外置驱动马达的依赖,提升结构的灵活性,实现结构轻量化。
19.2、形状记忆材料与嵌套游泳机器人的结合,能实现机器人智能化、环境敏感性,能够应对不同环境温度调整游泳姿态,实现速度稳定高效增长。
20.3、根据实际应用环境中需要,选择刚性或热膨胀头部,可以调控速度提升量级。通过单一调整或组合使用本发明的设计策略,可以实现单一的高速运输体内游泳机器人或实现集群式速度梯度分布微型游泳机器人。
21.4、在实现提速的前提下,通过仿真模拟验证,嵌套螺旋游泳机器人能够保证速度稳定增长,机器人体表各个特征点速度标准差较小,整体稳定。
22.5、可以极大地提高当前传统螺旋游泳机器人的运动速度,同时保证相当的稳定性和恢复力,通过嵌套设计可以实现速度梯度靶向输送药物或集群式游泳机器人等功能或应用。
附图说明
23.图1为本发明的折叠状态的嵌套式螺旋游泳机器人的结构示意图;
24.图2是本发明外层开口螺旋尾形态不变、内层螺旋尾伸长的螺旋游泳机器人的结构示意图;
25.图3是本发明整体半径增大的嵌套式螺旋尾游泳机器人的结构示意图。
具体实施方式
26.下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。
27.实施例1:
28.参见图1至图3,本发明提供的能够在低雷诺系数流场中快速运动的智能嵌套螺旋式人工微型游泳机器人由头部1(内含电机马达)、头尾连接段2、径向直径逐渐增大的开口型外层螺旋尾3和径向直径统一的内层螺旋尾4构成。
29.所述头部1长细比为11.72(长度7.5mm,半径0.64mm)的圆柱,相对于立方体或者方形板头部形状能有效减阻。头部可内置电机进行外部驱动。所述头部材料针对图1或者图2中的结构采用金属镍制造,针对头部能实现明显热膨胀的图3结构采用热膨胀缩醛树脂掺杂磁性颗粒制造,以便进行磁场驱动。径向直径统一的内层螺旋尾4与头部1之间采用胶水粘接法,增加头部与亲水螺旋尾之间的界面粘接能。径向直径逐渐增大的外层螺旋尾3与头部1之间的充分粘接通过增加径向直径统一的连接过渡段部分头尾连接段2,这样可保证整体结构特征,并保证头尾充分接触。
30.所述游泳机器人置于流场中,头部处于先接触流体的“前方”,减小阻力,外层螺旋尾3和内层螺旋尾4处于流场“后端”增加扭矩和推进力。
31.本发明中,图3所示的情况头部1半径0.64mm,高度7.5mm。
32.本发明中,所述外层螺旋尾3或者内层螺旋尾4大半径0.74mm,螺旋截面为圆形截面,小半径为0.09mm,轴向节距为2mm,半径逐渐增大结构的径向节距为0.5mm。除连接段外的螺旋匝数为3。
33.本发明中,所述smp为环氧树脂/正辛胺/间苯二甲胺以质量比1:0.1646:0.0868配置混合流体,或将芳纶纤维浸润在混合流体中,或通过模具进行纯树脂固化脱模,两种方法均可获得具有优良形状记忆效果的机器人螺旋尾。
34.本发明中,本发明中涉及的检测螺旋尾形状记忆效果的smp折叠/展开对应的实验温度分别为室温26℃和100℃(真空干燥箱加热或者水浴锅加热获得)。
35.本发明中,浸润过形状记忆树脂的螺旋尾的固化时间要3小时以上。
36.本发明中,采用芳纶纤维承载形状记忆树脂的螺旋尾需要在固化前刮掉纤维空隙间的气泡,否则会影响形状记忆效果。
37.本发明中,所述低雷诺系数流场环境为硅油,其密度为964kg/m3,其动力粘度为0.0964pa
·
s。本发明关于游泳机器人的运动性能评估,是通过comsolcfd模块仿真获得。
38.本发明实验验证中对smp螺旋尾进行dma动态力学分析、形变回复率等性能测试。本发明涉及smp形变回复率达到98.4%。
39.进一步地,通过改变温度使嵌套螺旋尾展开为伸长组合螺旋尾,所述组合螺旋尾以外层开口螺旋尾形态不变、内层螺旋尾伸长(图2)为例,或整体半径增大的嵌套式螺旋尾(图3)。
40.本发明中,嵌套式螺旋游泳机器人相对于传统螺旋机器人运动速度明显提升。经验证,外层开口螺旋尾形态不变、内层螺旋尾伸长的螺旋游泳机器人相对于单一尾的传统螺旋机器人速度提升51.0%;整体半径增大的嵌套式螺旋尾游泳机器人相对于传统螺旋机器人速度则显著提升226.3%。经验证,从结构设计角度出发,半径对于速度影响最为显著。因此本发明中给出了图1、图2、图3中的结构设计,可以通过单一或者组合使用,来实现增速效果或者设计高速度梯度集群游泳机器人,应用于生物医学、靶向运输药物等领域。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1