一种t双机双桨双轴双舵电推系统的制作方法
1.本发明涉及动力系统领域,具体为一种t双机双桨双轴双舵电推系统。
背景技术:
2.随着我国能源问题和环境问题日益严峻,以及国际油价的快速上涨,这就对船舶的经济性和排放性提出了更高的要求,也使船舶的节能减排技术成为大家关注和研究的热点之一。天然气作为发动机的燃料是未来船舶发动机发展的必然趋势,天然气有着绿色环保、经济实惠、安全可靠的优点。但受现阶段天然气发动机技术水平不高的限制,天然气发动机存在动力响应差、功率不足等缺点,纯电动船舶电力推进系统是未来船舶技术研究的前沿,具有良好的经济性、操纵性、安全性、低噪声以及低污染等优点。然而,受发电方式、功率密度以及储能技术的影响,现阶段的纯电动船舶并不能达到高性能的速度、加速度和自控性,其续航能力也受其电池容量制约。
3.根据公告号“cn 108674626 a”于提供一种双机双桨式气电混合船舶动力系统,本发明所采用的多种能量形式的布置可以满足船舶在各种环境和工况下的需求,进一步提高了气体机、可逆电机的运行效率,有效降低了气体机的燃料消耗和排放,同时改善了船舶的动力响应,而且系统的适用范围广。
4.但上述动力系统采用混合动力,操作性差,制动慢,正反速度切换慢,调速范围窄,体积庞大,震动噪音大,故障率高等缺点,因此急需一种操纵性好,调速范围宽,震动噪音小,故障率低占地面积小,驱动力大,且具有一种双机双桨双轴双舵可在故障时不至丧失动力,仍可运行的电推系统。
技术实现要素:
5.本发明为了解决现有技术的问题,提供了一种t双机双桨双轴双舵电推系统.
6.为了解决上述技术问题,本发明是通过以下技术方案实现的:
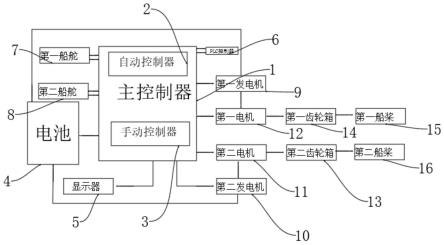
7.本发明一种t双机双桨双轴双舵电推系统,包括主控制器、自动控制器、手动控制器、电池与显示器,所述主控制器的内部连接有自动控制器,所述主控制器的内部连接有手动控制器,所述主控制器的一侧输出端电性连接有第一发电机,所述主控制器的一侧输出端电性连接有第二发电机,所述主控制器的一侧输入端电性连接有电池,所述主控制器的一侧输出端与显示器通过电性连接,所述主控制器与plc控制器相互电性连接,所述主控制器的一侧电性连接有第一船舵,所述主控制器的一侧电性连接有第二船舵,所述主控制器的一侧输出端电性连接有第二电机,所述主控制器的一侧输出端电性连接有第一电机,所述第二电机的输出端固定连接有第二齿轮箱,所述第二齿轮箱的输出端固定连接有第二船桨,所述第一电机的输出端固定连接有第一齿轮箱,所述第一齿轮箱的输出端固定连接有第一船桨。
8.优选的,所述plc控制器的输入端电性连接有实时监测模块,所述plc控制器的输出端电性连接有输出模块。
9.优选的,所述输出模块的内部连接有报警器,所述输出模块的内壁连接有紧急模块。
10.优选的,所述实时监测模块的内部连接有航向检测器,所述实时监测模块的内部连接有航线检测器,所述实时监测模块的内部连接有船桨转速检测器,所述实时监测模块的内部连接有gps定位器。
11.优选的,所述紧急模块的输出端分别与第一船舵、第二船舵电性连接。
12.优选的,所述紧急模块的输出端分别分别与第一电机、第二电机,所述紧急模块与主控制器通过电性连接。
13.本发明的有益效果为:通过设置主控制器、plc控制器紧急模块,实时检测信息出现船桨故障或对方船只距离过近等紧急情况时,此时紧急模块运作,控制第一电机与第二电机进行停止运作,或控制第一船舵与第二船舵进行紧急转向避让,有效提升船只行驶的安全性能,通过采用双机双桨双轴双舵结构及其电推系统,有效提升船体的操纵性,增宽调速范围,降低噪音震动,减少占地面积,增强驱动力,通过设置自动控制器与手动控制器,便于增强对船体的控制,在出现故障时,便于工作人员通过手动控制器对船体进行操作第一或第二发电机继而通过第一电机或第二电机经由第一齿轮箱或第二齿轮箱带动第一船桨或第二船桨进行转动,使得在遇到故障时,电推系统仍可运行,增强航行的安全性与稳定性,从而大大提升双机双桨双轴双舵电推系统简洁高效性。
附图说明
14.图1是本发明的整体系统结构示意图。
15.图2是本发明的plc控制器电性连接结构示意图。
16.图3是本发明的输出模块内部结构分布图。
17.图4是本发明的实时监测模块内部结构分布图。
18.图5是本发明的紧急模块电性连接结构示意图。
19.图1~5中:1、主控制器;2、自动控制器;3、手动控制器;4、电池;5、显示器;6、plc控制器;7、第一船舵;8、第二船舵;9、第一发电机;10、第二发电机;11、第二电机;12、第一电机;13、第二齿轮箱;14、第一齿轮箱;15、第一船桨;16、第二船桨;17、输出模块;18、报警器;19、紧急模块;20、航向检测器;21、gps定位器;22、航线检测器;23、船桨转速检测器;24、实时监测模块。
具体实施方式
20.实施例一
21.如图1~5所示的一种t双机双桨双轴双舵电推系统,包括主控制器1、自动控制器2、手动控制器3、电池4与显示器5,主控制器1的内部连接有自动控制器2,主控制器1的内部连接有手动控制器3,主控制器1的一侧输出端电性连接有第一发电机9,主控制器1的一侧输出端电性连接有第二发电机10,第一发电机9余第二发电机10分别独立运行,有相互配合,使得在遇到故障时,电推系统仍可运行,主控制器1的一侧输入端电性连接有电池4,电池4由于第一发电机9与第二发电机10进行供电,同时对主控制器1进行供电,主控制器1的一侧输出端与显示器5通过电性连接,显示器5与主控制器1相互连接配合,继而方便通过显
示器5对船体整体进行控制,主控制器1与plc控制器6相互电性连接,主控制器1的一侧电性连接有第一船舵7,主控制器1的一侧电性连接有第二船舵8,第一船舵7与第二船舵8相互独立分布,在出现故障时,便于工作人员进行独立控制,从而增强对船体的控制,主控制器1的一侧输出端电性连接有第二电机11,主控制器1的一侧输出端电性连接有第一电机12,第二电机11的输出端固定连接有第二齿轮箱13,第二齿轮箱13的输出端固定连接有第二船桨16,第一电机12的输出端固定连接有第一齿轮箱14,第一齿轮箱14的输出端固定连接有第一船桨15,在使用时通过采用双机双桨双轴双舵结构及其电推系统,有效提升船体的操纵性,增宽调速范围,降低噪音震动,减少占地面积,增强驱动力,通过设置自动控制器2与手动控制器3,便于增强对船体的控制,在出现故障时,便于工作人员通过手动控制器3对船体进行操作第一或第二发电机10继而通过第一电机12或第二电机11经由第一齿轮箱14或第二齿轮箱13带动第一船桨15或第二船桨16进行转动,使得在遇到故障时,电推系统仍可相互独立运行,增强船体航行使得便捷性的同时,也提高的船体操作的安全性与稳定性。
22.实施例二
23.如图1~5所示的一种t双机双桨双轴双舵电推系统,plc控制器6的输入端电性连接有实时监测模块24,plc控制器6的输出端电性连接有输出模块17,输出模块17的内部连接有报警器18,输出模块17的内壁连接有紧急模块19,输出模块17便于根据检测设备的及主控制器1的判断,对船体进行紧急的警报或制动,从而大大降低了船体行驶的事故率增强安全性,实时监测模块24的内部连接有航向检测器20,实时监测模块24的内部连接有航线检测器22,实时监测模块24的内部连接有船桨转速检测器23,实时监测模块24的内部连接有gps定位器21,实时监测模块24通过对各种信号的实时检测,有效的确保对船体情况的实时控制,提升对紧急情况的应对效果,减少应对时间,紧急模块19的输出端分别与第一船舵7、第二船舵8电性连接,紧急模块19的输出端分别分别与第一电机12、第二电机11,紧急模块19与主控制器1通过电性连接,实时监测模块24对各种信号进行实时检测,经由plc控制器6、主控制器1至显示器5显示,在遇到实时检测信息出现船桨故障或对方船只距离过近等紧急情况时,此时紧急模块19运作,控制第一电机12与第二电机11进行停止运作,或控制第一船舵7与第二船舵8进行紧急转向避让,有效提升船只行驶的安全性能。
24.综上所述,本发明具有以下有益效果:在操作该系统时,船体中的实时监测模块24对各种信号进行实时检测,经由plc控制器6、主控制器1至显示器5显示,在遇到实时检测信息出现船桨故障或对方船只距离过近等紧急情况时,此时紧急模块19运作,控制第一电机12与第二电机11进行停止运作,或控制第一船舵7与第二船舵8进行紧急转向避让,有效提升船只行驶的安全性能,通过采用双机双桨双轴双舵结构及其电推系统,有效提升船体的操纵性,增宽调速范围,降低噪音震动,减少占地面积,增强驱动力,通过设置自动控制器2与手动控制器3,便于增强对船体的控制,在出现故障时,便于工作人员通过手动控制器3对船体进行操作第一或第二发电机10继而通过第一电机12或第二电机11经由第一齿轮箱14或第二齿轮箱13带动第一船桨15或第二船桨16进行转动,使得在遇到故障时,电推系统仍可运行,增强航行的安全性与稳定性,从而提升船体操作便捷性的同时增强其行驶的安全性,遇到事故的处理效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1