一种基于机器视觉和声呐扫描的水下结构物检测机器人的制作方法
1.本实用新型涉及水下检测机器人领域,特别涉及一种基于机器视觉和声呐扫描的水下结构物检测机器人。
背景技术:
2.我国有大量的水库、江河桥梁等基础建设物,这些水库坝体、水下桥墩等结构物都需要定期检查和维修,以诊断这些重要的水下结构物的健康状态,确保水库和桥梁的安全。传统的水下坝体和桥墩检查都是蛙人下水检测、拍照录像,在水库深水区和流水下桥墩水域有相当的危险性,且费用较高。随着公路桥梁在役数量及在役年限的增加,桥梁检测尤其是涉水桥梁的检测常态化将是一个必然趋势,水下机器人替代蛙人进行水下结构物检测也必将成为趋势。
技术实现要素:
3.本实用新型的目的是克服上述现有技术中存在的问题,提供一种基于机器视觉和声呐扫描的水下结构物检测机器人,通过采集水下结构物、桩基和河床等的表象图像及构造,为后续的病害识别提供数据支持。
4.为此,本实用新型提供一种基于机器视觉和声呐扫描的水下结构物检测机器人,包括:舱体,其表面沿周向设置有多个推进器;水下摄像头,设置在所述舱体的表面,用于拍摄水下结构物;声呐传感器,设置在所述舱体的表面,用于向水下结构物发射并接收声呐;通信器,设置在所述舱体的表面,用于传递信息;支撑板,设置在所述舱体的内部,其上设置有处理器和水下电源;所述处理器分别与所述推进器、所述水下摄像头、所述声呐传感器以及所述通信器信号连接;所述水下电源分别与所述处理器、所述推进器、所述水下摄像头、所述声呐传感器以及所述通信器电连接。
5.进一步,所述水下摄像头位于所述推进器的上方。
6.更进一步,所述水下摄像头的上方设置有所述补光灯,所述补光灯设置在所述舱体的表面,所述补光灯与所述处理器信号连接,所述补光灯与所述水下电源电连接。
7.进一步,所述舱体为框架结构。
8.进一步,所述舱体的表面还设置有水压传感器,所述水压传感器与所述处理器信号连接,所述水压传感器与所述水下电源电连接。
9.进一步,所述舱体的顶部设置有拉环。
10.进一步,所述舱体的顶部设置有浮力器,所述浮力器与所述处理器信号连接,所述浮力器与所述水下电源电连接。
11.更进一步,所述浮力器上设置有拉环。
12.本实用新型提供的一种基于机器视觉和声呐扫描的水下结构物检测机器人,具有如下有益效果:
13.本实用新型使用框架形式的舱体结构立足于水下,减小水流的冲击力对于本实用
新型的影响,减小水流冲击的横截面积,加大浮心与重心的距离增加本实用新型在水下的稳定性;
14.当机器人向潜到桩基底部时,底部泥沙由于受推进器旋转的影响,导致水质更加浑浊,不利于观察和采集图像,本实用新型的水下摄像头,结合补光灯一起使得水下浑浊的图像被录制的更加清晰;
15.本实用新型在舱体的顶部设置浮力器,使得为本实用新型提供浮力,使得本实用新型在需要上岸的时候,快速上岸。
附图说明
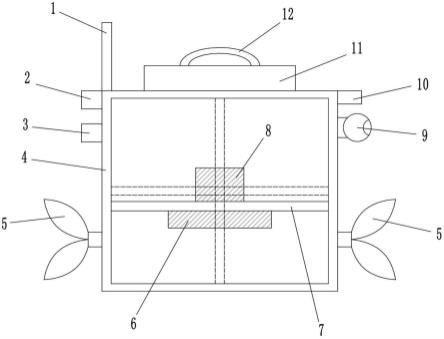
16.图1为本实用新型的整体结构示意图;
17.图2为本实用新型的原理示意图。
18.附图标记说明:
19.1、通信器;2、声呐传感器;3、水压传感器;4、舱体;5、推进器;6、水下电源;7、支撑板;8、处理器;9、水下摄像头;10、补光灯;11、浮力器;12、拉环。
具体实施方式
20.下面结合附图,对本实用新型的一个具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
21.在本申请文件中,未经明确的部件型号以及结构,均为本领域技术人员所公知的现有技术,本领域技术人员均可根据实际情况的需要进行设定,在本申请文件的实施例中不做具体的限定。
22.具体的,如图1-2所示,本实用新型实施例提供了一种基于机器视觉和声呐扫描的水下结构物检测机器人,包括:舱体4、水下摄像头9、声呐传感器 2、通信器1、支撑板7、处理器8以及水下电源6。其中,舱体4的表面沿周向设置有多个推进器5,用于使得本实用新型在水下移动;水下摄像头9设置在所述舱体4的表面,用于拍摄水下结构物的图像;声呐传感器2设置在所述舱体 4的表面,用于向水下结构物发射并接收声呐;通信器1设置在所述舱体4的表面,用于传递信息;支撑板7设置在所述舱体4的内部,其上设置有处理器 8和水下电源6;所述处理器8分别与所述推进器5、所述水下摄像头9、所述声呐传感器2以及所述通信器1信号连接;所述水下电源6分别与所述处理器 8、所述推进器5、所述水下摄像头9、所述声呐传感器2以及所述通信器1电连接。
23.本实用新型中,在使用的时候,本实用新型位于水下进行作业,可以使用遥控器对水下机器人进行位置的移动的操作,本实用新型在水下的时候,处理器控制舱体4表面的多个推进器5,使得本实用新型在水下可以自由的移动,同时,声呐传感器2和水下摄像头9对水下的结构物进行拍摄,并将拍摄的数据通过通信器1传递到陆面的工作人员处。
24.在本实用新型中,所述水下摄像头9位于所述推进器5的上方。同时,所述水下摄像头9的上方设置有所述补光灯10,所述补光灯10设置在所述舱体 4的表面,所述补光灯10与所述处理器8信号连接,所述补光灯10与所述水下电源6电连接。本实用新型中的补光灯10用于在水下为水下摄像头9所拍摄的景象进行补光,使得图像看起来更加的清晰。
25.在本实用新型中,所述舱体4为框架结构,从而减小水流的冲击力对于本实用新型
的影响,减小水流冲击的横截面积,加大浮心与重心的距离增加本实用新型在水下的稳定性。框架结构也可以叫开放式架构,把所需的部件设备固定在这个载体上,因部件可以直接与水接触,要求部件水密性高,但好处是安装方便,可以根据作业需求容易加装或改装添加其他传感设备等。
26.在本实用新型中,所述舱体4的表面还设置有水压传感器3,所述水压传感器3与所述处理器8信号连接,所述水压传感器3与所述水下电源6电连接。本实用新型同时实时的将水中的水压进行检测,并将数据传递到陆面。
27.在本实用新型中,为了确保顺利的回收本实用新型到陆面上,所述舱体4 的顶部设置有拉环12。
28.在本实用新型中,所述舱体4的顶部设置有浮力器11,所述浮力器11与所述处理器8信号连接,所述浮力器11与所述水下电源6电连接。同时,所述浮力器11上设置有拉环12。本实用新型在舱体的顶部设置浮力器11,使得为本实用新型提供浮力,使得本实用新型在需要上岸的时候,快速上岸,并在水面上漂浮,便于岸上的工作人员发现并回收。浮力器11为整个水下机器人提供浮力,在推进器不工作状态下时可以保证水下机器人处理零浮力状态,漂浮在水面。
29.以上公开的仅为本实用新型的几个具体实施例,但是,本实用新型实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
技术特征:
1.一种基于机器视觉和声呐扫描的水下结构物检测机器人,其特征在于,包括:舱体(4),其表面沿周向设置有多个推进器(5);水下摄像头(9),设置在所述舱体(4)的表面,用于拍摄水下结构物;声呐传感器(2),设置在所述舱体(4)的表面,用于向水下结构物发射并接收声呐;通信器(1),设置在所述舱体(4)的表面,用于传递信息;支撑板(7),设置在所述舱体(4)的内部,其上设置有处理器(8)和水下电源(6);所述处理器(8)分别与所述推进器(5)、所述水下摄像头(9)、所述声呐传感器(2)以及所述通信器(1)信号连接;所述水下电源(6)分别与所述处理器(8)、所述推进器(5)、所述水下摄像头(9)、所述声呐传感器(2)以及所述通信器(1)电连接。2.如权利要求1所述的一种基于机器视觉和声呐扫描的水下结构物检测机器人,其特征在于,所述水下摄像头(9)位于所述推进器(5)的上方。3.如权利要求2所述的一种基于机器视觉和声呐扫描的水下结构物检测机器人,其特征在于,所述水下摄像头(9)的上方设置有补光灯(10),所述补光灯(10)设置在所述舱体(4)的表面,所述补光灯(10)与所述处理器(8)信号连接,所述补光灯(10)与所述水下电源(6)电连接。4.如权利要求1所述的一种基于机器视觉和声呐扫描的水下结构物检测机器人,其特征在于,所述舱体(4)为框架结构。5.如权利要求1所述的一种基于机器视觉和声呐扫描的水下结构物检测机器人,其特征在于,所述舱体(4)的表面还设置有水压传感器(3),所述水压传感器(3)与所述处理器(8)信号连接,所述水压传感器(3)与所述水下电源(6)电连接。6.如权利要求1所述的一种基于机器视觉和声呐扫描的水下结构物检测机器人,其特征在于,所述舱体(4)的顶部设置有拉环(12)。7.如权利要求1所述的一种基于机器视觉和声呐扫描的水下结构物检测机器人,其特征在于,所述舱体(4)的顶部设置有浮力器(11),所述浮力器(11)与所述处理器(8)信号连接,所述浮力器(11)与所述水下电源(6)电连接。8.如权利要求7所述的一种基于机器视觉和声呐扫描的水下结构物检测机器人,其特征在于,所述浮力器(11)上设置有拉环(12)。
技术总结
本实用新型公开了一种基于机器视觉和声呐扫描的水下结构物检测机器人,包括舱体,其表面沿周向设置有多个推进器;水下摄像头设置在所述舱体的表面,用于拍摄水下结构物;声呐传感器设置在所述舱体的表面,用于向水下结构物发射并接收声呐;通信器设置在所述舱体的表面,用于传递信息;支撑板,设置在所述舱体的内部,其上设置有处理器和水下电源;所述处理器分别与所述推进器、所述水下摄像头、所述声呐传感器以及所述通信器信号连接;所述水下电源分别与所述处理器、所述推进器、所述水下摄像头、所述声呐传感器以及所述通信器电连接。本实用新型通过采集水下结构物、桩基和河床等的表象图像及构造,为后续的病害识别提供数据支持。持。持。
技术研发人员:赵柯东
受保护的技术使用者:陕西易合交通科技有限公司
技术研发日:2022.03.02
技术公布日:2022/6/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1