水下无人机的制作方法
本技术属于无人机,尤其涉及水下无人机。
背景技术:
1、现有在高桩梁板码头建设竣工验收时,需要对码头结构进行全面检测验收,其中需要对高桩梁板码头下部进行水深地形测量,检查其积淤情况、水深情况、桩基质量情况。其中传统方法需要人工到达高桩梁板码头底部进行测量检测,该方法人工检测的方法不仅检测效率低,测量不够准确,同时由于需要涉水深潜,存在较高的安全隐患。
技术实现思路
1、本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种能够自动实现下潜和移动动作并智能化的实现对码头下方进行深度检测和地形情况采集的水下无人机。
2、本实用新型的目的采用如下技术方案实现:
3、水下无人机,包括:
4、机身;
5、浮潜装置,设置于所述机身上,用于驱动所述机身上浮或下潜;
6、动力装置,设置于所述机身上,用于驱动所述机身移动;
7、深度检测装置,用于测量所述机身距离海平面的距离;
8、地形采集装置,用于采集所述机身附近的地形情况。
9、进一步地,所述深度检测装置包括浮块、连接所述浮块和机身的连接绳、用于收放连接绳的驱动器以及信号检测装置,所述信号检测装置可根据所述连接绳放出长度或者驱动器运作情况得出所述机身距离海平面的距离。
10、进一步地,所述地形采集装置包括雷达以及用于采集目标图像信息的摄像头。
11、进一步地,所述机身上还设有用于照射所述摄像头采集位置的探照灯。
12、进一步地,所述浮潜装置包括水囊以及用于抽吸或排出所述水囊中液体的水泵。
13、进一步地,所述动力装置包括了螺旋桨以及用于驱动所述螺旋桨转动的电机。
14、进一步地,所述机身的两侧上设有侧翼,所述动力装置有两个且分别设置于所述侧翼上。
15、进一步地,所述机身尾部还设有用于控制所述机身前进方向的方向舵以及用于驱动所述方向舵摆动的舵机。
16、进一步地,所述机身呈椭圆饼状。
17、相比现有技术,本实用新型的有益效果在于:
18、本实用新型的水下无人机在使用时,可先将机身放置在码头附近海平面上,之后通过浮潜装置控制机身下潜至指定的深度同时也开启动力装置驱动机身移动至指定的地点,最后通过深度检测装置和地形采集装置便能够实现对此时机身深度信息和所处地理环境进行信息采集。本方案通过上述设置,直接采用无人机取代传统的人工检测的方式,不仅能够安全稳定的移动至检测地点,提高检测效率,减少安全隐患。同时智能化的检测能够使得检测和采集的效率更高,也能够提高检测的准确性和采集的清晰度,方便后续工作的进行。
技术特征:
1.水下无人机,其特征在于,包括:
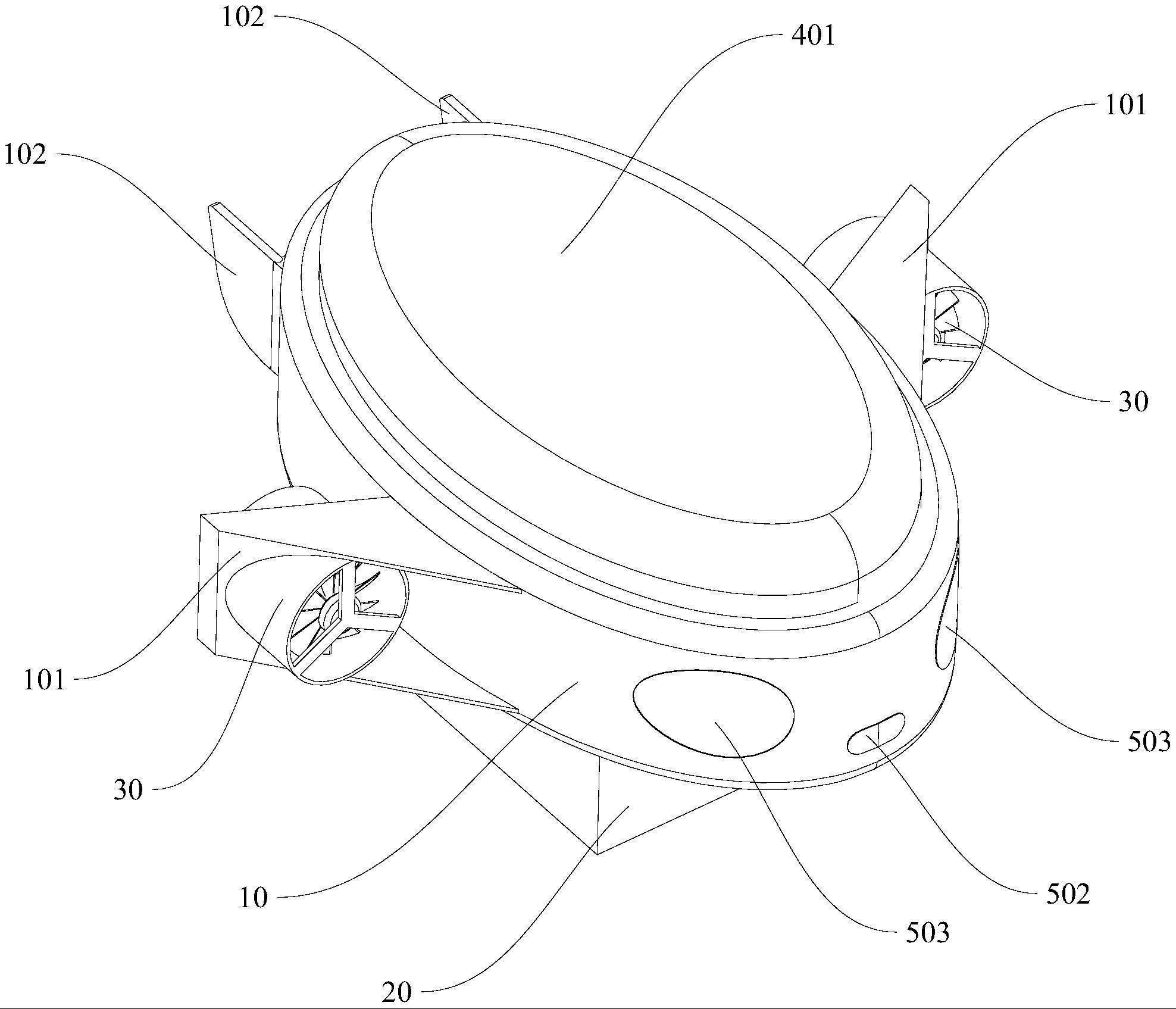
2.如权利要求1所述的水下无人机,其特征在于,所述深度检测装置(40)包括浮块(401)、连接所述浮块(401)和机身(10)的连接绳(402)、用于收放连接绳(402)的驱动器(403)以及信号检测装置,所述信号检测装置可根据所述连接绳(402)放出长度或者驱动器(403)运作情况得出所述机身(10)距离海平面的距离。
3.如权利要求1所述的水下无人机,其特征在于,所述地形采集装置包括雷达(501)以及用于采集目标图像信息的摄像头(502)。
4.如权利要求3所述的水下无人机,其特征在于,所述机身(10)上还设有用于照射所述摄像头(502)采集位置的探照灯(503)。
5.如权利要求1所述的水下无人机,其特征在于,所述浮潜装置(20)包括水囊(201)以及用于抽吸或排出所述水囊(201)中液体的水泵(202)。
6.如权利要求1所述的水下无人机,其特征在于,所述动力装置(30)包括了螺旋桨以及用于驱动所述螺旋桨转动的电机。
7.如权利要求1所述的水下无人机,其特征在于,所述机身(10)的两侧上设有侧翼(101),所述动力装置(30)有两个且分别设置于所述侧翼(101)上。
8.如权利要求1所述的水下无人机,其特征在于,所述机身(10)尾部还设有用于控制所述机身(10)前进方向的方向舵(102)以及用于驱动所述方向舵(102)摆动的舵机(103)。
9.如权利要求1所述的水下无人机,其特征在于,所述机身(10)呈椭圆饼状。
技术总结
本技术提供一种水下无人机,包括机身、设置于机身上且用于驱动机身上浮或下潜的浮潜装置、设置于机身上且用于驱动机身移动的动力装置、用于测量机身距离海平面的距离的深度检测装置以及用于采集机身附近的地形情况地形采集装置。本方案通过上述设置,直接采用无人机取代传统的人工检测的方式,不仅能够安全稳定的移动至检测地点,提高检测效率,减少安全隐患。同时智能化的检测能够使得检测和采集的效率更高,也能够提高检测的准确性和采集的清晰度,方便后续工作的进行。
技术研发人员:袁泽军,蔡观振,黄丹,李斯霞,钟梓翰,谢润奇
受保护的技术使用者:广州宾模工程管理有限公司
技术研发日:20220531
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!