水面牵引器和水面清漂系统的制作方法
1.本技术涉及水面清理环保领域,具体涉及一种水面牵引器和包含该水面牵引器的水面清漂系统。
背景技术:
2.在环保领域,河道、湖区、水库等水域中藻类以及漂浮垃圾的清理是一项繁复而又重要的工作。对水面漂浮物进行清捞与治理,可为航运及旅游事业的发展提供良好的环境基础,保持水路交通畅通,提高水上交通的安全系数;同时可改善水域的环境卫生面貌,确保水体生物物种的生态平衡。
3.传统的清理作业一般采用人工打捞及设网拦截的方式,但这类方式存在人工强度大、清理不完全等问题。因此,近些年出现专门用于清理水体垃圾的清理船,比如拦截式清理船。如公告号cn104554642b的中国发明专利公开了一种漂浮物清理船,其通过两条围栏分别钩连两只引拉船,通过引拉船拉紧围栏形成“八”形,将漂浮物汇集至清理船进行收集处理。
4.对于该类拦截式清理船,在前方用于牵引围栏的牵引器结构设计会影响拦截的灵活性和续航能力,因此行业内对牵引器不断进行改进设计。如公告号cn206704481u的中国实用新型专利公开了一种漂浮物清理船配套的全滤网引拉船,其通过在船体设置滤网,能减轻转向时的阻力,提高转向灵敏度。
5.但目前所改进的牵引器,还存在结构复杂、灵活性不好、自重较大等问题。
6.为此,研究一种更为简单灵活的水面牵引器成为本领域技术人员亟待解决的问题。
技术实现要素:
7.为了克服上述现有技术的缺陷,本技术提供一种水面牵引器以及提供包含该水面牵引器的水面清漂系统,以克服现有技术中灵活不足、结构复杂等缺陷。
8.第一方面,本技术提供一种水面牵引器,所述水面牵引器包括用于使所述水面牵引器漂浮于水面的漂浮主体及与所述漂浮主体固定连接的导向推进机构;
9.所述导向推进机构包括设置于所述漂浮主体后段的尾推进器以及设置于所述尾推进器前方的侧推进器;
10.所述尾推进器包括第一驱动电机及第一桨叶,所述第一驱动电机与所述第一桨叶传动连接,所述第一桨叶的推进方向朝向所述水面牵引器前进方向的后方;
11.所述侧推进器包括第二驱动电机及第二桨叶,所述第二驱动电机与所述第二桨叶传动连接,所述第二桨叶的推进方向与所述水面牵引器前进方向相交;
12.所述第二驱动电机配置成具有正转状态和反转状态,所述第二驱动电机在正转状态驱动所述第二桨叶进行正转推进,所述第二驱动电机在反转状态驱动所述第二桨叶进行反转推进。
13.其中,通过设置单个侧推进器,简化了结构,减轻了自重,使得整体灵活性更高,并且降低维修成本。
14.在一种可选择的实现方式中,所述漂浮主体包括壳体,所述壳体的内部设置有浮箱及工作腔,所述浮箱设置于所述工作腔的上方,所述导向推进机构固定设置于所述工作腔内。
15.通过浮箱和工作腔的设计,既能实现自浮效果,又便于安装设置。
16.第二方面,本技术提供一种水面清漂系统,所述水面清漂系统包括清理船以及连接于所述清理船前端的两个浮臂,以及如上所述的水面牵引器,所述水面牵引器设置有两个;每一浮臂两端分别连接清理船和一水面牵引器。
17.上述所提供的水面清漂系统,可在水面行驶清漂,可以适用于各类水体表面进行清漂处理。
18.第三方面,本技术提供另一种所述水面清漂系统,所述水面清漂系统包括岸基和一端连接于所述岸基的浮臂,以及如上所述的水面牵引器,所述浮臂的另一端与所述水面牵引器连接。
19.上述所提供的水面清漂系统,可定点沿河道岸边设置,以进行长期稳定的清漂作业。
20.根据前述实现方式所提供的水面牵引器,具有结构轻便、灵活的效果,可以适用于多种水面清漂作业方式。
附图说明
21.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1为本技术一实施方式提供的水面牵引器的结构示意视图;
23.图2为本技术一实施方式提供的水面牵引器的立体结构示意图;
24.图3为本技术一实施方式提供的水面牵引器的侧面视图;
25.图4为本技术一实施方式提供的水面牵引器的内部结构示意图;
26.图5为本技术一实施方式提供的水面清漂系统的示意图;
27.图6为本技术另一实施方式提供的水面清漂系统的示意图。
28.附图标记说明:
29.100、水面牵引器;200、浮臂;300、清理船;400、岸基;
30.1、漂浮主体;11、壳体;12、浮箱;13、工作腔;111、通孔;14、连接件;15、尾端排水口;16、侧排水口;17、控制传感器17;121、顶盖;
31.2、导向推进机构;21、尾推进器;22、侧推进器;211、第一驱动电机;212、第一桨叶;221、第二驱动电机;222、第二桨叶。
具体实施方式
32.下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清
楚、完整地描述,显然,所描述的实施方式仅是本技术的一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
33.本文中,术语“第一”“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。本技术的描述中,除非有另外说明,“多个”的含义是两个或两个以上。
34.需要说明的是,在本技术中,“前”、“后”、“左”、“右”等方位术语是相对于所述水面牵引器100的前进方向来定义的,应当理解到,这些方向性术语是相对的概念,它们用于相对于地描述和澄清。
35.请参阅图1至图4,本技术一实施方式提供一种水面牵引器100,所述水面牵引器100包括用于使所述水面牵引器100漂浮于水面的漂浮主体1及与所述漂浮主体1固定连接的导向推进机构2。
36.所述水面牵引器100通常配合浮臂200进行使用,浮臂200用于对水体漂浮物进行拦截收集,水面牵引器100用于牵引浮臂200进行运动。
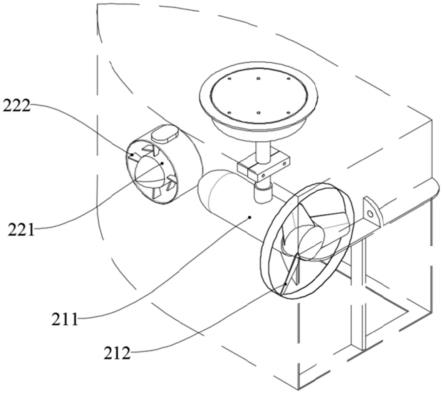
37.其中,如图4所示,所述导向推进机构2包括设置于所述漂浮主体1后段的尾推进器21以及设置于所述尾推进器21前方的侧推进器22。
38.具体的,结合图1所示,所述尾推进器21包括第一驱动电机211及第一桨叶212,所述第一驱动电机211与所述第一桨叶212传动连接,所述第一桨叶212的推进方向朝向所述水面牵引器100前进方向的后方;
39.所述侧推进器22包括第二驱动电机221及第二桨叶222,所述第二驱动电机221与所述第二桨叶222传动连接,所述第二桨叶222的推进方向与所述水面牵引器100前进方向相交。
40.本技术中,所述第二驱动电机221配置成具有正转状态和反转状态,所述第二驱动电机221在正转状态驱动所述第二桨叶222进行正转推进,所述第二驱动电机221在反转状态驱动所述第二桨叶222进行反转推进。
41.在电机技术领域中,要实现电机的正转和反转,只需要采用常规的控制电路和开关器件,比如将电机的三相电源线进行任意两相的对调切换,即可实现正转和反转的切换。本技术基于电机的基本功能,巧妙地将其应用于本技术中,以单个电机的正转和反转的切换,驱动桨叶实现不同方向的转动,以达到双向推进的效果,实现左右转向的调整,大大简化了结构,减轻了自重,提高了灵活性。
42.本实施例中,结合图4所示,所述漂浮主体1包括壳体11,所述壳体11的内部设置有浮箱12及工作腔13,所述浮箱12设置于所述工作腔13的上方,所述导向推进机构2固定设置于所述工作腔13内。
43.通过将工作腔13设置于浮箱12下方,工作腔13内部固定导向推进机构2,形成上轻下重的结构形态,有利于控制所述水面牵引器100在水面的稳定性。
44.为了减少所述水面牵引器100在行进时的阻力,所述壳体11前端可以设置为尖状结构或半圆形结构。
45.本实施例中,所述壳体11前端为尖状结构,有助于在水面上向前行进,并且可以推
开阻挡的漂浮物。
46.具体的,本实施例中,所述壳体11为船形结构,包括尾面、顶面、底面以及分别连接于所述尾面两端的两个侧面,两个侧面在前端相拼合形成尖状头部。
47.为了避免水体漂浮物卡住桨叶,并且减小水体对壳体11的阻力,结合图3所示,所述壳体11侧壁设置有若干通孔111。所述通孔111排布于所述壳体11侧壁。
48.为了便于与用于拦截漂浮物的浮臂200进行连接,所述漂浮主体1的尾部固定设置有连接件14。所述连接件14可以为挂孔结构。
49.为了使所述导向推进机构2实现良好的推进调整效果,所述壳体11尾部设置有供所述尾推进器21的推动水流通过的尾端排水口15,所述尾端排水口15连通于所述工作腔13,且所述尾端排水口15与所述尾推进器21对应设置。
50.同时,所述壳体11的两侧分别开设有供所述侧推进器22的推动水流通过的侧排水口16(图中仅示一侧),所述侧排水口16连通于所述工作腔13,且所述侧排水口16与所述侧推进器22对应设置。本实施例中,所述侧排水口16设置为两个,分别设置于所述壳体11的两个侧面。
51.本实施例中,为了防止控制器件进水受损,所述浮箱12内设置控制传感器17,所述控制传感器17通过导线分别与所述尾推进器21及所述侧推进器22电连接,所述控制传感器17还通过线路与外部控制系统进行供电连接及信号连接。
52.导线和线路的连接方式可采用本领域的常规技术手段进行实现,本实施例中不作特别的限定和说明,图中不作特别标示。
53.为了保证浮力以及防止控制传感器17进水,所述浮箱12采用防水结构设计,避免水进入浮箱12导致浮力下降。
54.所述控制传感器17与所述尾推进器21及所述侧推进器22的连接线路,以及供电连接及信号连接的连接线路,在穿设于所述浮箱12时,均在穿设处进行防水设计,如采用防水软胶封口等方式。
55.在其他实施例中,所述浮箱12内可充填低密度浮体材料,比如发泡棉、气袋等,当浮箱12不慎进水时,仍可保证浮力,避免所述水面牵引器100沉入水中。
56.为了便于放置所述控制传感器17,所述浮箱12的上表面设置有顶盖121,所述顶盖121可开启或关闭,以便放入所述控制传感器17。所述顶盖121设置为防水结构,以免液体进入浮箱12内部。
57.本技术中,所述水面牵引器100通过电缆线路与外部供电及控制系统进行连接,以提供所述水面牵引器100的电力及运动控制。供电及控制系统可采用常规技术进行实现,本技术中不作特别的限定和说明。
58.在一实施例中,如图5所示,本技术提供一种水面清漂系统,所述水面清漂系统包括清理船300以及连接于所述清理船300前端的两个浮臂200,以及如上述的水面牵引器100,所述水面牵引器100设置有两个;每一浮臂200两端分别连接清理船300和一水面牵引器100。
59.上述所提供的水面清漂系统,可在水面行驶清漂,可以适用于各类水体表面进行清漂处理。
60.在另一实施例中,如图6所示,本技术提供另一种水面清漂系统,所述水面清漂系
统包括岸基400和一端连接于所述岸基400的浮臂200,以及如上所述的水面牵引器100,所述浮臂200的另一端与所述水面牵引器100连接。
61.上述所提供的水面清漂系统,可定点沿河道岸边设置,以进行长期稳定的清漂作业。
62.以上对本技术实施方式所提供的水面牵引器100和水面清漂系统进行了详细介绍,应用了具体实施例对本技术的原理及实施方式进行了阐释,以上说明只是用于帮助理解本技术的方法及其核心机理;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施例及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1