一种多功能仿生机器人
本技术涉及机器人,尤其涉及的是一种多功能仿生机器人。
背景技术:
1、目前,机器人的工作日益丰富,随着人们对海洋环境的探索,对灵活机动、敏捷性的水下机器人要求更高。国内外常见的水下机械大多采用螺旋桨驱动的方式,螺旋桨驱动的方式存在噪声大、隐蔽性差、结构复杂的缺陷,具有一定的局限性。
技术实现思路
1、本实用新型的目的在于克服现有技术的不足,提供了一种多功能仿生机器人,以实现机器人在水下的灵活前进以及转向且能耗低。
2、本实用新型是通过以下技术方案实现的:
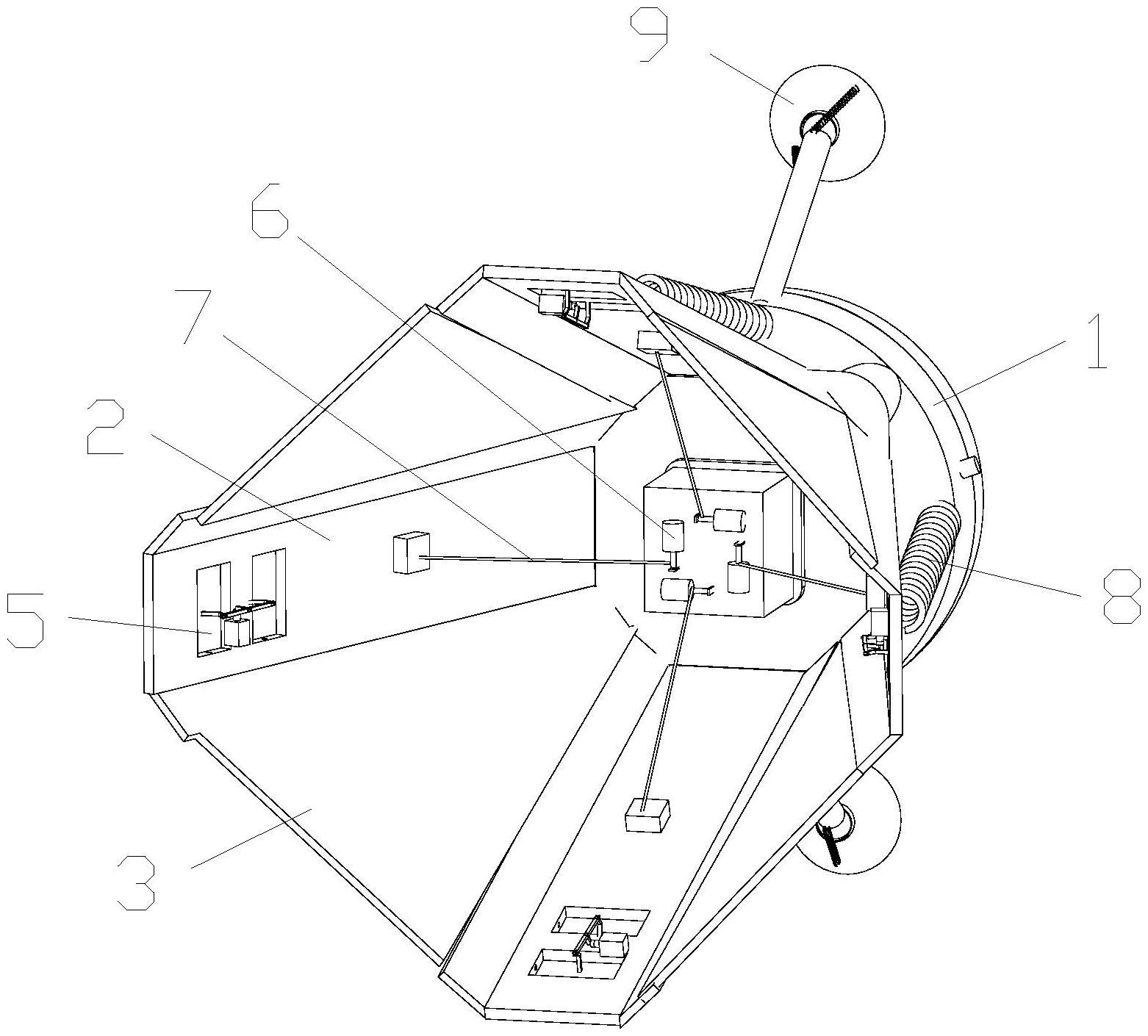
3、一种多功能仿生机器人,包括基座,所述基座后端沿周向间隔分布有多个推进翼板,各个推进翼板前端转动连接在基座上、后端为自由端,相邻推进翼板之间通过弹性膜实现连接,通过弹性膜将相邻推进翼板之间的间隙封闭,多个推进翼板和多个弹性膜形成伞体结构,伞体结构与基座之间的空腔形成推进腔,基座上设有推进驱动机构,通过推进驱动机构带动多个推进翼板独立转动,从而实现推进翼板向外展开或向内收缩,进而实现推进腔的体积的变化,从而带动机器人前进;所述推进翼板上设有用于改变机器人运动方向的水流调节组件。
4、作为上述机器人的优选方案,所述水流调节组件包括至少一个水流调节板,推进翼板上开有用于放置水流调节板的至少一个避让槽,推进翼板内侧设有水流调节驱动机构,通过水流调节驱动机构带动水流调节板翻转,从而改变水流调节板与推进翼板之间的相对角度。
5、作为上述机器人的优选方案,所述推进驱动机构包括多组独立的推进驱动组件,多组推进驱动组件一一对应的驱动多个推进翼板独立转动,每组推进驱动组件包括推进电机、拉线、拉簧,拉簧位于推进翼板外侧,拉簧前端固定在基座上,拉簧后端固定在推进翼板外侧,推进电机安装在基座后端且位于推进翼板内侧,推进电机的输出轴上设有绕线滚筒,拉线的一端固定在绕线滚筒上,拉线的另一端固定在推进翼板内侧,通过推进电机带动绕线滚筒正反转,从而实现拉线的收放,配合着拉簧的作用,进而实现推进翼板向内收缩或向外展开。
6、作为上述机器人的优选方案,所述基座前侧沿周向设有至少两组吸盘组件,每组吸盘组件包括吸盘撑杆、吸盘和预紧弹簧,吸盘撑杆后端固定在基座上,吸盘撑杆前端通过球形铰接头连接吸盘,吸盘外周设有至少两个预紧弹簧,预紧弹簧前端固定在吸盘外侧壁上、后端固定在吸盘撑杆上。
7、作为上述机器人的优选方案,所述基座前端设有透明外壳,透明外壳与基座之间形成密闭空腔,密闭空腔中设有视觉部件。
8、作为上述机器人的优选方案,所述基座上沿周向设有酸碱度传感器、压力传感器以及温度传感器。
9、作为上述机器人的优选方案,所述水流调节驱动机构包括水流调节电机、摆动导杆、按压臂,水流调节电机安装在推进翼板内侧,水流调节电机的输出轴上固定有与输出轴相垂直的摇臂,摇臂末端固定连接与摇臂相垂直的摆动导杆,水流调节板内侧固定有一个按压臂,按压臂的另一端铰接在摆动导杆上。
10、本实用新型相比现有技术具有以下优点:
11、本实用新型提供的一种多功能仿生机器人,其将机器人主体设计为伞体结构,并将基座及沿基座周向分布的多个推进翼板作为伞体结构的骨架,通过推进驱动机构带动多个推进翼板独立转动,从而实现伞体结构的收缩或展开,模仿水母的吸水或喷水过程,这一连续的过程为机器人提供了前进的动力;同时在推进翼板还设有水流调节组件,通过水流调节组件来改变机器人运动方向,从而对机器人的位置姿态进行灵活调整。此外,本实用新型提供的多功能仿生机器人,相对于传统的螺旋桨驱动结构的机器人,具有噪音小、机动灵活性高、隐蔽性强、能耗低等优点,应用场合丰富。
技术特征:
1.一种多功能仿生机器人,包括基座(1),其特征在于:所述基座(1)后端沿周向间隔分布有多个推进翼板(2),各个推进翼板(2)前端转动连接在基座(1)上、后端为自由端,相邻推进翼板(2)之间通过弹性膜(3)实现连接,通过弹性膜(3)将相邻推进翼板(2)之间的间隙封闭,多个推进翼板(2)和多个弹性膜(3)形成伞体结构,伞体结构与基座(1)之间的空腔形成推进腔(4),基座(1)上设有推进驱动机构,通过推进驱动机构带动多个推进翼板(2)独立转动,从而实现推进翼板(2)向外展开或向内收缩,进而实现推进腔(4)的体积的变化,从而带动机器人前进;所述推进翼板(2)上设有用于改变机器人运动方向的水流调节组件(5)。
2.如权利要求1所述的一种多功能仿生机器人,其特征在于:所述水流调节组件(5)包括至少一个水流调节板(14),推进翼板(2)上开有用于放置水流调节板(14)的至少一个避让槽(15),推进翼板(2)内侧设有水流调节驱动机构,通过水流调节驱动机构带动水流调节板(14)翻转,从而改变水流调节板(14)与推进翼板(2)之间的相对角度。
3.如权利要求1所述的一种多功能仿生机器人,其特征在于:所述推进驱动机构包括多组独立的推进驱动组件,多组推进驱动组件一一对应的驱动多个推进翼板(2)独立转动,每组推进驱动组件包括推进电机(6)、拉线(7)、拉簧(8),拉簧(8)位于推进翼板(2)外侧,拉簧(8)前端固定在基座(1)上,拉簧(8)后端固定在推进翼板(2)外侧,推进电机(6)安装在基座(1)后端且位于推进翼板(2)内侧,推进电机(6)的输出轴上设有绕线滚筒,拉线(7)的一端固定在绕线滚筒上,拉线(7)的另一端固定在推进翼板(2)内侧,通过推进电机(6)带动绕线滚筒正反转,从而实现拉线(7)的收放,配合着拉簧(8)的作用,进而实现推进翼板(2)向内收缩或向外展开。
4.如权利要求1所述的一种多功能仿生机器人,其特征在于:所述基座(1)前侧沿周向设有至少两组吸盘组件(9),每组吸盘组件(9)包括吸盘撑杆(10)、吸盘(11)和预紧弹簧(12),吸盘撑杆(10)后端固定在基座(1)上,吸盘撑杆(10)前端通过球形铰接头(13)连接吸盘(11),吸盘(11)外周设有至少两个预紧弹簧(12),预紧弹簧(12)前端固定在吸盘(11)外侧壁上、后端固定在吸盘撑杆(10)上。
5.如权利要求1所述的一种多功能仿生机器人,其特征在于:所述基座(1)前端设有透明外壳(20),透明外壳(20)与基座(1)之间形成密闭空腔,密闭空腔中设有视觉部件。
6.如权利要求5所述的一种多功能仿生机器人,其特征在于:所述基座(1)上沿周向设有酸碱度传感器、压力传感器以及温度传感器。
7.如权利要求2所述的一种多功能仿生机器人,其特征在于:所述水流调节驱动机构包括水流调节电机(16)、摆动导杆(17)、按压臂(18),水流调节电机(16)安装在推进翼板(2)内侧,水流调节电机(16)的输出轴上固定有与输出轴相垂直的摇臂(19),摇臂(19)末端固定连接与摇臂(19)相垂直的摆动导杆(17),水流调节板(14)内侧固定有一个按压臂(18),按压臂(18)的另一端铰接在摆动导杆(17)上。
技术总结
本技术公开了一种多功能仿生机器人,包括基座,基座后端沿周向间隔分布有多个推进翼板,各个推进翼板前端转动连接在基座上、后端为自由端,相邻推进翼板之间通过弹性膜实现连接,通过弹性膜将相邻推进翼板之间的间隙封闭,多个推进翼板和多个弹性膜形成伞体结构,伞体结构与基座之间的空腔形成推进腔,基座上设有推进驱动机构,通过推进驱动机构带动多个推进翼板独立转动,从而实现推进翼板向外展开或向内收缩,进而实现推进腔的体积的变化,从而带动机器人前进;推进翼板上设有用于改变机器人运动方向的水流调节组件。本技术相比现有技术具有以下优点:实现机器人在水下的灵活前进以及转向且能耗低。
技术研发人员:王晓杰,眭翔,张嘉庆
受保护的技术使用者:中国科学院合肥物质科学研究院
技术研发日:20221209
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!