一种无人船自主航行能力测试评估系统的制作方法
1.本技术涉及自主航行技术领域,尤其是一种无人船自主航行能力测试评估系统。
背景技术:
2.随着新一轮科技革命的加速演进,无人船舶成为了传统船舶工业与新兴技术的融合体,而水面无人船(unmanned surface vehicle)作为一种重要的无人船舶,在海洋经济发展和军事作战装备等方面有着广泛的应用前景。随着包括无人船自主航行技术在内的无人船关键技术发展,无人船在譬如水文调查、情报搜集、反潜跟踪、水产捕捞等作业场景下已经可以代替有人船艇。现阶段下无人船具有远大的发展前景,全世界的主要大国也都在加速无人船关键技术的研究与发展,力求抢占智能时代船舶行业的发展制高点。
3.但目前,与无人船自主航行能力的提升与发展相比,无人船自主航行能力的测评技术并不能与之匹配,很多研究机构都是采用一种定性的测试方法来评判无人船在设计场景或真实场景下的自主航行能力,即通过对测试全过程的观察,简单地依据无人船是否能够完成下达的自主航行任务来判断自主航行系统的能力。这种测试方法既不全面也不客观,测试效果并不理想。
技术实现要素:
4.本技术人针对上述问题及技术需求,提出了一种无人船自主航行能力测试评估系统,本技术的技术方案如下:
5.一种无人船自主航行能力测试评估系统,该无人船自主航行能力测试评估系统包括设置在岸上的岸端主机以及搭载在待测试无人船上的艇端主机和数据采集器;
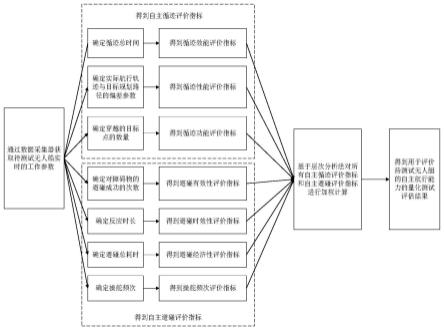
6.利用无人船自主航行能力测试评估系统对待测试无人船的自主航行能力进行测试评估的方法包括,当待测试无人船在包含障碍物的测试场景中沿着目标规划路径航行的过程中:
7.艇端主机每隔预定时间间隔通过数据采集器获取待测试无人船的经纬度信息、航向角、航速和舵角;
8.根据目标规划路径和待测试无人船的经纬度信息和航向角得到自主循迹评价指标;
9.根据待测试无人船的经纬度信息、航速和舵角得到自主避碰评价指标;
10.对自主循迹评价指标和自主避碰评价指标进行加权计算,得到用于评价待测试无人船的自主航行能力的量化测试评估结果并发送给岸端主机。
11.其进一步的技术方案为,待测试无人船依次跟踪目标规划路径上的各个目标点以沿着目标规划路径航行,得到自主循迹评价指标的方法包括:
12.确定待测试无人船沿着目标规划路径从航行起点至航行终点的循迹总时间,并确定循迹总时间对应的循迹效能评价指标,循迹总时间越短、循迹效能评价指标指示的自主航行能力越优;
13.确定待测试无人船的实际航行轨迹与目标规划路径的偏差参数,并确定偏差参数对应的循迹性能评价指标,偏差参数越小、循迹性能评价指标指示的自主航行能力越优;
14.确定待测试无人船穿越的目标规划路径上的目标点的数量,并确定与穿越的目标点数量对应的循迹功能评价指标,待测试无人船穿越的目标点数量越多、循迹功能评价指标指示的自主航行能力越优。
15.其进一步的技术方案为,确定待测试无人船穿越的目标点的数量的方法包括:
16.根据相邻两个目标点在航行坐标系下的坐标确定任意两个相邻的目标点之间的目标航线的表达式ax+by+c=0,a、b、c均为参数;
17.将采集到的待测试无人船的经纬度信息转换为航行坐标系下的航迹点坐标(xn,yn);
18.对于任意两个目标点之间的目标航线ax+by+c=0,当存在至少一个航迹点坐标(xn,yn)与目标航线之间的航迹截距小于穿越半径r,且航迹点坐标(xn,yn)与其他的航迹点坐标不存在时间序列异常时,确定待测试无人船穿越目标航线的终点处的目标点。
19.其进一步的技术方案为,确定待测试无人船的实际航行轨迹与目标规划路径的偏差参数的方法包括:
20.在待测试无人船在从任意一个目标点驶向下一个目标点的过程中,根据相邻两个目标点在航行坐标系下的坐标确定两个目标点之间的目标航线的表达式ax+by+c=0,a、b、c均为参数;
21.将采集到的任意一个经纬度信息转换为航行坐标系下的航迹点坐标(xn,yn),并根据两个目标点之间的目标航线的表达式ax+by+c=0计算得到航迹点坐标与目标航线之间的航迹截距计算所有航迹点坐标与对应的目标航线之间的航迹截距dn构成的数组的平均值和均方差值mse(dn);
22.计算任意相邻两个航迹点的坐标确定两个航迹点之间的实时航线的表达式anx+bny+cn=0,an、bn、cn均为参数,并计算航迹点坐标对应的航向夹角计算所有航迹点坐标对应的航向夹角θn构成的数组的平均值和均方差值mse(θn);
23.确定待测试无人船的实际航行轨迹与目标规划路径的偏差参数包括:所有航迹截距dn构成的数组的平均值和均方差值mse(dn),以及所有航向夹角θn构成的数组的平均值和均方差值mse(θn)。
24.其进一步的技术方案为,确定自主避碰评价指标的方法包括:
25.确定待测试无人船对测试场景中的障碍物避碰成功的次数,并得到对应的避碰有效性评价指标,避碰成功的次数越多、避碰有效性评价指标指示的自主航行能力越优;
26.确定待测试无人船监测到障碍物与开始执行避碰操作之间的反应时长,并得到对应的避碰时效性评价指标,反应时长越短、避碰时效性评价指标指示的自主航行能力越优;
27.确定待测试无人船对障碍物执行避碰操作的避碰总耗时,并得到对应的避碰经济性评价指标,避碰总耗时越短、避碰经济性评价指标指示的自主航行能力越优;
28.确定待测试无人船对障碍物执行避碰操作的过程中的操舵频次,并得到对应的操舵频次评价指标,操舵频次越低、操舵频次评价指标指示的自主航行能力越优。
29.其进一步的技术方案为,确定待测试无人船对测试场景中的障碍物避碰成功的次数的方法包括对于每个障碍物:
30.将采集到的任意一个待测试无人船的经纬度信息转换为航行坐标系下的航迹点坐标,当所有航迹点坐标(xn,yn)与障碍物的坐标(x0,y0)之间的距离时,确定待测试无人船对于障碍物避碰成功,否则确定对障碍物避碰不成功;
31.其中,危险碰撞距离η1是系数,l是待测试无人船的船长,k表示障碍物的航速与待测试无人船的航速之比,δδ是待测试无人船的航向角与障碍物的航向角之间的夹角。
32.其进一步的技术方案为,确定待测试无人船对障碍物执行避碰操作的避碰总耗时的方法包括:
33.将检测到障碍物且待测试无人船的工作参数符合避障特征的时刻作为避障过程起始时刻并确定此时的航行轨迹;
34.将待测试无人船的经纬度信息在航行坐标系下的航迹点坐标(xn,yn)与障碍物的坐标(x0,y0)之间的距离达到避碰距离d2,且待测试无人船回到避障过程起始时刻的航行轨迹的时刻作为避障过程结束时刻;η2是系数,l是待测试无人船的船长,k表示障碍物的航速与待测试无人船的航速之比,δδ是待测试无人船的航向角与障碍物的航向角之间的夹角;
35.确定避障过程起始时刻与避障过程结束时刻之间的时长为避碰总耗时。
36.其进一步的技术方案为,待测试无人船上搭载的数据采集器还包括轴扭矩传感器和轴转速传感器;确定待测试无人船对障碍物执行避碰操作的反应时长的方法包括:
37.将检测到障碍物的时刻与待测试无人船的工作参数符合避障特征的时刻之间的时长作为反应时长;
38.其中,艇端主机通过轴扭矩传感器采集轴扭矩信息、通过轴转速传感器采集轴转速信息,并根据轴扭矩信息和轴转速信息计算得到主轴实时功率,当检测到主轴实时功率的下降率超过第一阈值,或者轴转速信息的下降率超过第二阈值,或者舵角的变化率达到第三阈值,则确定待测试无人船的工作参数符合避障特征。
39.其进一步的技术方案为,得到量化测试评估结果的方法包括:
40.构建准则层,准则层包括自主循迹评价指标和自主避碰评价指标的所有m个指标项;
41.构建方案层,方案层包括若干个待评估方案,每个待评估方案包括自主循迹评价
指标和自主避碰评价指标的所有m个指标项及对应的指标结果;
42.确定准则层中每个指标项的准则层权重,确定方案层中每个待评估方案包含的每个指标项的指标结果的方案层权重;
43.确定每个待评估方案的量化测试评估结果其中am是待评估方案包含的第m个指标项的准则层权重,cm是待评估方案包含的第m个指标项的指标结果的方案层权重。
44.其进一步的技术方案为,确定每个指标项的准则层权重以及每个待评估方案包含的每个指标项的指标结果的方案层权重的方法包括:
45.针对准则层构建准则层比较矩阵,准则层比较矩阵中的任意第i行第j列的元素表示准则层的第i个指标项相对于第j个指标项的重要性比值,i、j为参数且i≤m、j≤m;对准则层比较矩阵进行一致性校验,并求得最大特征根及其对应的特征向量,对准则层比较矩阵的特征向量进行归一化,得到各个指标项的准则层权重;
46.针对方案层构建m个方案层比较矩阵,每个方案层比较矩阵分别对应准则层的一个指标项,对应于其中任意第m个指标项的方案层比较矩阵中的任意第p行第q列的元素表示:方案层的第p个待评估方案包含的第m个指标项的指标结果与第q个待评估方案包含的第m个指标项的指标结果的比值,p、q为参数;对每个方案层比较矩阵进行一致性校验,并求得最大特征根及其对应的特征向量,对每个方案层比较矩阵的特征向量进行归一化,得到每个待评估方案包含的每个指标项的指标结果的方案层权重。
47.本技术的有益技术效果是:
48.本技术公开了一种无人船自主航行能力测试评估系统,当待测试无人船在诸如封闭试验水域内、类真实航道与真实航道等测试场景中进行自主航行时,利用本系统可以采集实测得到待测试无人船的各种实时的工作参数,并结合评价指标的数学模型与量化算法对试验数据进行计算与分析,可以对待测试无人船的自主循迹功能和自主避碰功能进行分析评价,从而得到全面、客观、准确且定量的评估结果,对自主航行系统能力的测评提供重要支撑,为其后续的升级与开发提供指导。
49.该系统可以对对待测试无人船的自主循迹功能和自主避碰功能分别进行功能、性能、效能的测试验证和评估,测试评估更全面,而且可以收集待测试无人船的在航行过程中的航行数据和外部环境数据,用于验证和改进自主航行系统产品的动态性能、可靠性和智能效能。
50.该系统利用分布式采集技术,采用多种信号采集板卡,可以采集包括数字模拟信号、电压/电流信号、脉冲信号等多类型测试信号。经过总控制器统一处理,采用网络向艇端工控机传输测量信号,减弱了外界电磁环境对数据传输的影响,提高了数据采集可靠性的同时也降低了系统数据接口的开发难度。同时,信号采集节点内预留多个采集板卡槽位,通过后期对采集板卡的加改装使得系统的测试功能有较强拓展性。且该系统采取分布采集、统一传输的方式,既保证了不同采样率的要求,又保证了数据采集的同步性。还可以实现关键测量数据的船岸实时数据交互与岸基存储功能。
附图说明
51.图1是本技术一个实施例中的无人船自主航行能力测试评估系统的系统结构图。
52.图2是本技术一个实施例中得到量化测试评估结果的流程示意图。
53.图3是本技术一个实施例中构建得到的层次化模型的示意图。
具体实施方式
54.下面结合附图对本技术的具体实施方式做进一步说明。
55.本技术公开了一种无人船自主航行能力测试评估系统,该系统特别适用于百吨级的无人船的自主航行能力测试评估。请参考图1,该无人船自主航行能力测试评估系统包括设置在岸上的岸端主机1以及搭载在待测试无人船100上的艇端主机2和数据采集器,艇端主机2与岸端主机1建立无线通信连接,从而可以实现岸艇通信,包括由岸端主机1向艇端主机2发送控制指令,还包括由艇端主机2向岸端主机1返回获取到的各种数据。如图1所示,待测试无人船100上一般还设置数传电台3,艇端主机2连接数传电台3,并通过数传电台3与岸端主机1建立无线通信连接。
56.艇端主机2用于对整个测试评估进行统一配置与调控。在一个实施例中,为了提高处理控制能力,艇端主机2包括相连的艇端工控机21和总控制器22,总控制器22连接布设在待测试无人船100上的各种数据采集器以获取数据并进行包括解析、封装与上传等数据处理操作并将数据发送给艇端工控机21,艇端工控机21用于获取总控制器22上传的数据并进行处理运算与存储等操作,艇端工控机21连接数传电台3以与岸端主机1建立无线通信、将相应的数据上传到岸端。艇端工控机21和总控制器22一般都布设在待测试无人船100的驾驶室内,数传电台3也布设在驾驶室内,本技术后续不再对艇端工控机21和总控制器22各自的功能分别介绍,统一以艇端主机2为主体介绍。
57.布设在待测试无人船100上的数据采集器用于采集并记录待测试无人船100的各种实时的工作参数,在本技术中,数据采集器至少包括惯导4和舵角传感器5。除此之外,该数据采集器还包括加速度传感器6、风速风向仪7、轴扭矩传感器8和轴转速传感器9。
58.(1)惯导4用于获取待测试无人船100的经纬度信息、航向角、航速、艏向角和姿态数据,姿态数据包括纵摇角、横摇角、纵摇角速度、横摇角速度。惯导4的主机一般安装在待测试无人船100的驾驶室内,惯导4的天线一般安装在艇艏的甲板或罗经甲板上。
59.(2)舵角传感器5用于获取待测试无人船100的舵角。舵角传感器5一般安装在该待测试无人船100的桅杆处。
60.(3)加速度传感器6用于获取该待测试无人船100的加速度。在一个实施例中,待测试无人船100的艏部、舯部和艉部分别安装加速度传感器6且均沿着艇体中线布设。待测试无人船100的艏部安装的加速度传感器6布置在艇艏舱室底部、延艇体中线摆放,用于测量艇艏的加速度。待测试无人船100的舯部安装的加速度传感器6布置在艇舯甲板上、延艇体中线摆放,用于测量艇舯的加速度。待测试无人船100的艉部安装的加速度传感器6布置在船艉机舱内、延艇体中线摆放,用于测量艇艉的加速度。
61.(4)轴扭矩传感器8用于获取待测试无人船的轴扭矩信息,一般安装在待测试无人船100的中间主轴上。
62.(5)轴转速传感器9用于获取待测试无人船的轴转速信息,一般安装在待测试无人
船100的中间主轴上。
63.(6)风速风向仪7用于获取待测试无人船100所在环境的风速信息和风向信息。一般安装在待测试无人船100的桅杆上.
64.如上介绍可知,待测试无人船100的艏部、舯部、艉部均布设有各种数据采集器,因此为了方便数据采集和汇总,如图1所示,该待测试无人船100的艏部、舯部、艉部分别对应布设信号采集节点。待测试无人船100的艏部的信号采集节点10通常布设在艇艏的驾驶室内,用于汇总布设在艏部的各种数据采集器的数据,包括惯导4和待测试无人船100的艏部安装的加速度传感器6。待测试无人船100的舯部的信号采集节点11通常布设在艇舯甲板上,用于汇总布设在舯部的各种数据采集器的数据,包括风速风向仪7和待测试无人船100的舯部安装的加速度传感器6。待测试无人船100的艉部的信号采集节点12通常布设在船艉机舱内,用于汇总布设在艉部的各种数据采集器的数据,包括舵角传感器5、轴扭矩传感器8、轴转速传感器9和待测试无人船100的艉部安装的加速度传感器6。待测试无人船100的艏部、舯部、艉部的信号采集节点10、信号采集节点11、信号采集节点12均连接艇端主机2,具体的连接艇端主机2总控制器22。
65.该无人船自主航行能力测试评估系统用对待测试无人船100的自主航行能力进行测试评估,在利用无人船自主航行能力测试评估系统对待测试无人船的自主航行能力进行测试评估的过程中,艇端主机2通过各类数据采集器获取待测试无人船各种实时的工作参数,并对工作参数进行计算以得到量化测试评估结果。艇端主机2可以将实时的工作参数以及得到的量化测试评估结果发送给岸端主机1,以使用户通过岸端主机1可以实时监控待测试无人船100的测试评估过程,这些数据还可以在岸端主机1中实现数据存储。
66.利用该无人船自主航行能力测试评估系统对待测试无人船100的自主航行能力进行测试评估时,控制待测试无人船100在包含障碍物的测试场景中沿着目标规划路径航行,并进行数据采集和计算。预先规划好待测试无人船100的目标规划路径,也即确定好目标规划路径上的各个目标点,然后待测试无人船100通过依次跟踪目标规划路径上的各个目标点来沿着目标规划路径航行。在待测试无人船的航行过程中,艇端主机2执行如下方法,请参考图2:
67.步骤1,艇端主机每隔预定时间间隔通过数据采集器获取待测试无人船100的工作参数,基于测试评估过程所需使用到的数据,该步骤包括通过惯导4获取待测试无人船的经纬度信息、航向角、航速,并通过舵角传感器5获取待测试无人船100的舵角。
68.步骤2,根据目标规划路径和待测试无人船的经纬度信息和航向角得到自主循迹评价指标。
69.在一个实施例中,得到自主循迹评价指标的方法包括得到循迹效能评价指标、循迹性能评价指标和循迹功能评价指标,包括:
70.(1)确定待测试无人船沿着目标规划路径从航行起点至航行终点的循迹总时间,并确定循迹总时间对应的循迹效能评价指标。
71.不同的循迹总时间与循迹效能评价指标的对应关系预先建立得到,且循迹总时间越短、循迹效能评价指标指示的自主航行能力越优。
72.(2)确定待测试无人船的实际航行轨迹与目标规划路径的偏差参数,并确的对应关系预先建立得到,定偏差参数对应的循迹性能评价指标。不同的偏差参数与循迹性能评
价指标,且偏差参数越小、循迹性能评价指标指示的自主航行能力越优。确定待测试无人船的实际航行轨迹与目标规划路径的偏差参数的方法包括:
73.在待测试无人船在从任意一个目标点驶向下一个目标点的过程中,将采集到的任意一个经纬度信息转换为航行坐标系下的航迹点坐标(xn,yn),并根据两个目标点之间的目标航线的表达式ax+by+c=0计算得到航迹点坐标与目标航线之间的航迹截距计算所有航迹点坐标与对应的目标航线之间的航迹截距dn构成的数组的平均值dn和均方差值mse(dn)。
74.计算任意相邻两个航迹点的坐标确定两个航迹点之间的实时航线的表达式anx+bny+cn=0,an、bn、cn均为参数。并计算航迹点坐标对应的航向夹角计算所有航迹点坐标对应的航向夹角θn构成的数组的平均值和均方差值mse(θn)。
75.确定待测试无人船的实际航行轨迹与目标规划路径的偏差参数包括:所有航迹截距dn构成的数组的平均值和均方差值mse(dn),以及所有航向夹角θn构成的数组的平均值和均方差值mse(θn)。
76.(3)确定待测试无人船穿越的目标规划路径上的目标点的数量,并确定与穿越的目标点数量对应的循迹功能评价指标。穿越的目标点的不同数量与循迹功能评价指标的对应关系预先建立得到,且待测试无人船穿越的目标点数量越多、循迹功能评价指标指示的自主航行能力越优。
77.确定待测试无人船穿越的目标点的数量的方法包括:根据相邻两个目标点在航行坐标系下的坐标确定任意两个相邻的目标点之间的目标航线的表达式ax+by+c=0,a、b、c均为参数。将采集到的待测试无人船的经纬度信息转换为航行坐标系下的航迹点坐标(xn,yn);
78.对于任意两个目标点之间的目标航线ax+by+c=0,当存在至少一个航迹点坐标(xn,yn)与目标航线之间的航迹截距小于穿越半径r,且航迹点坐标(xn,yn)与其他的航迹点坐标不存在时间序列异常时,确定该待测试无人船穿越该目标航线的终点处的目标点。
79.对所有目标点之间构成的目标航线都按照上述方法进行计算,统计汇总该待测试无人船总共穿越的目标规划路径上的目标点的数量。
80.步骤3,根据待测试无人船的经纬度信息、航速和舵角得到自主避碰评价指标。确定自主避碰评价指标包括确定待测物无人船对障碍物的避碰有效性评价指标、避碰时效性评价指标、避碰经济性评价指标和操舵频次评价指标,本技术中的障碍物包括静态障碍物和动态障碍物,动态障碍物比如其他船舶。
81.(1)确定待测试无人船对测试场景中的障碍物避碰成功的次数,并得到对应的避碰有效性评价指标,不同的避碰成功次数与避碰有效性评价指标的对应关系预先建立得
到,且避碰成功的次数越多、避碰有效性评价指标指示的自主航行能力越优。
82.对于任意一个障碍物,确定待测试无人船对该障碍物是否避碰成功的方法包括:将采集到的任意一个待测试无人船的经纬度信息转换为航行坐标系下的航迹点坐标,当所有航迹点坐标(xn,yn)与该障碍物的坐标(x0,y0)之间的距离时,确定待测试无人船对于障碍物避碰成功,否则确定对障碍物避碰不成功。
83.其中,危险碰撞距离d1是待测试无人船100在航行过程中与障碍物之间不应到达的距离,且η1是系数,l是待测试无人船的船长,k是障碍物的航速与待测试无人船的航速之比,δδ是待测试无人船的航向角与障碍物的航向角之间的夹角。当障碍物为静态障碍物时,k为0,航向相关项2k*cosδδ也为0。
84.(2)确定待测试无人船监测到障碍物与开始执行避碰操作之间的反应时长,并得到对应的避碰时效性评价指标,不同的反应时长与避碰时效性评价指标的对应关系预先建立得到,且反应时长越短、避碰时效性评价指标指示的自主航行能力越优。
85.将待测试无人船100检测到障碍物的时刻与待测试无人船100的工作参数符合避障特征的时刻之间的时长作为反应时长。其中,艇端主机通过轴扭矩传感器采集轴扭矩信息、通过轴转速传感器采集轴转速信息,并根据轴扭矩信息和轴转速信息依据经验公式可以计算得到主轴实时功率,当检测到主轴实时功率的下降率超过第一阈值,或者轴转速信息的下降率超过第二阈值,或者舵角的变化率达到第三阈值,也即当舵角出现大幅持续的脉冲,以及轴转速和主轴实时功率都出现明显下降时,则确定待测试无人船的工作参数符合避障特征,确定待测试无人船100开始执行避碰操作。
86.(3)确定待测试无人船对障碍物执行避碰操作的避碰总耗时,并得到对应的避碰经济性评价指标,不同的避碰总耗时与避碰经济性评价指标的对应关系预先建立得到,且避碰总耗时越短、避碰经济性评价指标指示的自主航行能力越优。
87.将检测到障碍物且待测试无人船的工作参数符合避障特征的时刻作为避障过程起始时刻并确定此时的航行轨迹。待测试无人船的工作参数符合避障特征的情况与上述情况(2)中,该为避障过程起始时刻即待测试无人船100开始执行避碰操作的时刻。
88.将待测试无人船的经纬度信息在航行坐标系下的航迹点坐标(xn,yn)与障碍物的坐标(x0,y0)之间的距离达到避碰距离d2,且待测试无人船回到避障过程起始时刻的航行轨迹的时刻作为避障过程结束时刻。
89.其中避碰距离d2是待测试无人船在开始执行避碰操作时与障碍物之间的距离,η2是系数,l是待测试无人船的船长,k表示障碍物的航速与待测试无人船的航速之比,δδ是待测试无人船的航向角与障碍物的航向角之间的夹角。
90.η2》η1,因此该避碰距离d2大于危险碰撞距离d1,一般可以取η2为27海里,取η1为15海里。然后确定避障过程起始时刻与避障过程结束时刻之间的时长为避碰总耗时。
91.(4)确定待测试无人船对障碍物执行避碰操作的过程中的操舵频次,并得到对应的操舵频次评价指标,由于定期采集并记录舵角,因此操舵频次通过统计舵角的变化情况就能得到。不同的操舵频次与操舵频次评价指标的对应关系预先建立得到,且操舵频次越低、操舵频次评价指标指示的自主航行能力越优。
92.步骤4,对自主循迹评价指标和自主避碰评价指标进行加权计算,得到用于评价待测试无人船的自主航行能力的量化测试评估结果并发送给岸端主机。
93.一个实施例中,可以预先对自主循迹评价指标和自主避碰评价指标的各个指标项建立对应的权重并进行加权计算。或者在另一个实施例中,采用层次分析法对自主循迹评价指标和自主避碰评价指标进行加权计算。
94.首先构建层次分析模型,包括构建目标层、准则层、方案层,目标层是使待测试无人船具有最优的自主航行能力。准则层包括自主循迹评价指标和自主避碰评价指标的所有m个指标项,在一个实施例中,准则层包括7个指标项,分别为循迹效能评价指标c1、循迹性能评价指标c2、循迹功能评价指标c3、避碰有效性评价指标c4、避碰时效性评价指标c5、避碰经济性评价指标c6、操舵频次评价指标c7。
95.方案层包括若干个待评估方案,如图3以包含3个待评估方案为例。每个待评估方案包括自主循迹评价指标和自主避碰评价指标的所有m个指标项及对应的指标结果。
96.然后确定准则层中每个指标项的准则层权重,确定方案层中每个待评估方案包含的每个指标项的指标结果的方案层权重。在一个实施例中,确定的方法包括:
97.针对准则层构建准则层比较矩阵,准则层比较矩阵中的任意第i行第j列的元素表示准则层的第i个指标项相对于第j个指标项的重要性比值,i、j为参数且i≤m、j≤m。一般情况下,准则层比较矩阵中的任意第i行第j列的元素的取值范围为1~9,当元素的取值为1时,表示第i个指标项与第j个指标项的重要性相同,元素的取值增大时,表示第i个指标项的重要性相较于第j个指标项的重要性更大,比如元素的取值为9时,表示第i个指标项比第j个指标项的极端重要。比如在一个实例中,构建得到的准则层比较矩阵为:
[0098] c1c2c3c4c5c6c7c11342762c21/311/21/2333c31/4211/3542c41/2231547c51/71/31/51/511/22c61/61/31/41/4212c71/21/31/21/71/21/21
[0099]
准则层比较矩阵中的元素的取值一般人为定义,各个元素的取值未必合理,而且事实上,准则层比较矩阵的规模越大,元素取值不合理的情况越容易出现。比如在上述举例中,c1/c2=1/3,c1/c3=1/4,因此有c3/c2=4/3,但是实际上c3/c2=1/2。在误差允许范围内,这种逻辑偏差可以被接受,但超出误差允许范围就需要修正。因此首先对准则层比较矩阵进行一致性校验,计算一致性校验指标λ
max
是准则层比较矩阵的最大特征根,ε是最大特征根λ
max
对应的唯一非零特征根。计算一致性比例ri表示平均随机一致性指标,与ε的取值对应,可以通过查表得到。当一致性比例cr在误差允许范围内,准则层比较矩阵通过一致性校验,否则调整准则层比较矩阵,直至准则层比较矩阵通过一致性校验。在准则层比较矩阵通过一致性校验后,求得准则层比较矩阵的最大特征根λ
max
及其对
应的特征向量,然后对求得的准则层比较矩阵的特征向量进行归一化,即可得到各个指标项的准则层权重,将任意第m个指标项的准则层权重定义为am,1≤m≤m。
[0100]
针对方案层构建m个方案层比较矩阵,每个方案层比较矩阵分别对应准则层的一个指标项。其中,对应于其中任意第m个指标项的方案层比较矩阵中的任意第p行第q列的元素表示:方案层的第p个待评估方案包含的第m个指标项的指标结果与第q个待评估方案包含的第m个指标项的指标结果的比值,p、q为参数。
[0101]
比如基于图3的举例,假设待评估方案1包含的操舵频次评价指标c7的指标结果为5次/小时,待评估方案2包含的操舵频次评价指标c7的指标结果为10次/小时,待评估方案3包含的操舵频次评价指标c7的指标结果为8次/小时。则构建得到的对应于操舵频次评价指标c7的方案层比较矩阵为:
[0102] 待评估方案1待评估方案2待评估方案3待评估方案1128/5待评估方案21/214/5待评估方案35/85/41
[0103]
同样的,对每个方案层比较矩阵进行一致性校验。当通过一致性校验后,求得方案层比较矩阵的最大特征根及其对应的特征向量,对每个方案层比较矩阵的特征向量进行归一化,得到每个待评估方案包含的每个指标项的指标结果的方案层权重。与上述准则层比较矩阵的做法相同,该实施例不再赘述。
[0104]
比如基于对应于操舵频次评价指标c7的方案层比较矩阵可以得到:待评估方案1包含的操舵频次评价指标c7的指标结果的方案层权重、待评估方案2包含的操舵频次评价指标c7的指标结果的方案层权重、待评估方案3包含的操舵频次评价指标c7的指标结果的方案层权重。其他的方案层比较矩阵同样如此,由此可以得到每个待评估方案包含的所有指标项的指标结果的方案层权重。从而可以确定每个待评估方案的量化测试评估结果其中am是该待评估方案包含的第m个指标项的准则层权重,cm是该待评估方案包含的第m个指标项的指标结果的方案层权重。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1