一种水域自主导航监测无人船的制作方法
本发明属于水域中的无人机监测,涉及一种水域自主导航监测无人船。
背景技术:
1、伴随着中国人口老龄化的趋势,水域作业劳动力的缺口就会逐渐扩大。高成本,低效率的传统人工水面作业已经成为国内水域工作行业的痛点。
2、智能化一直是船舶发展的趋势。近年来,伴随着物联网、大数据、云计算、人工智能等新理念、新技术的突飞猛进,船舶自动化水平不断提高,无人船的实现有了科技支撑,无人驾驶船舶航行于全球有了实现的可能性。
3、针对目前的水域作业问题,亟需一种用于无人驾驶的水域作业的无人机的产生。
技术实现思路
1、本发明目的在于提供一种水域自主导航监测无人船,以解决现有人口老龄化严重,水域工作效率低的技术问题。
2、为实现上述目的,本发明通过以下技术方案予以实现。
3、一种水域自主导航监测无人船,包括,
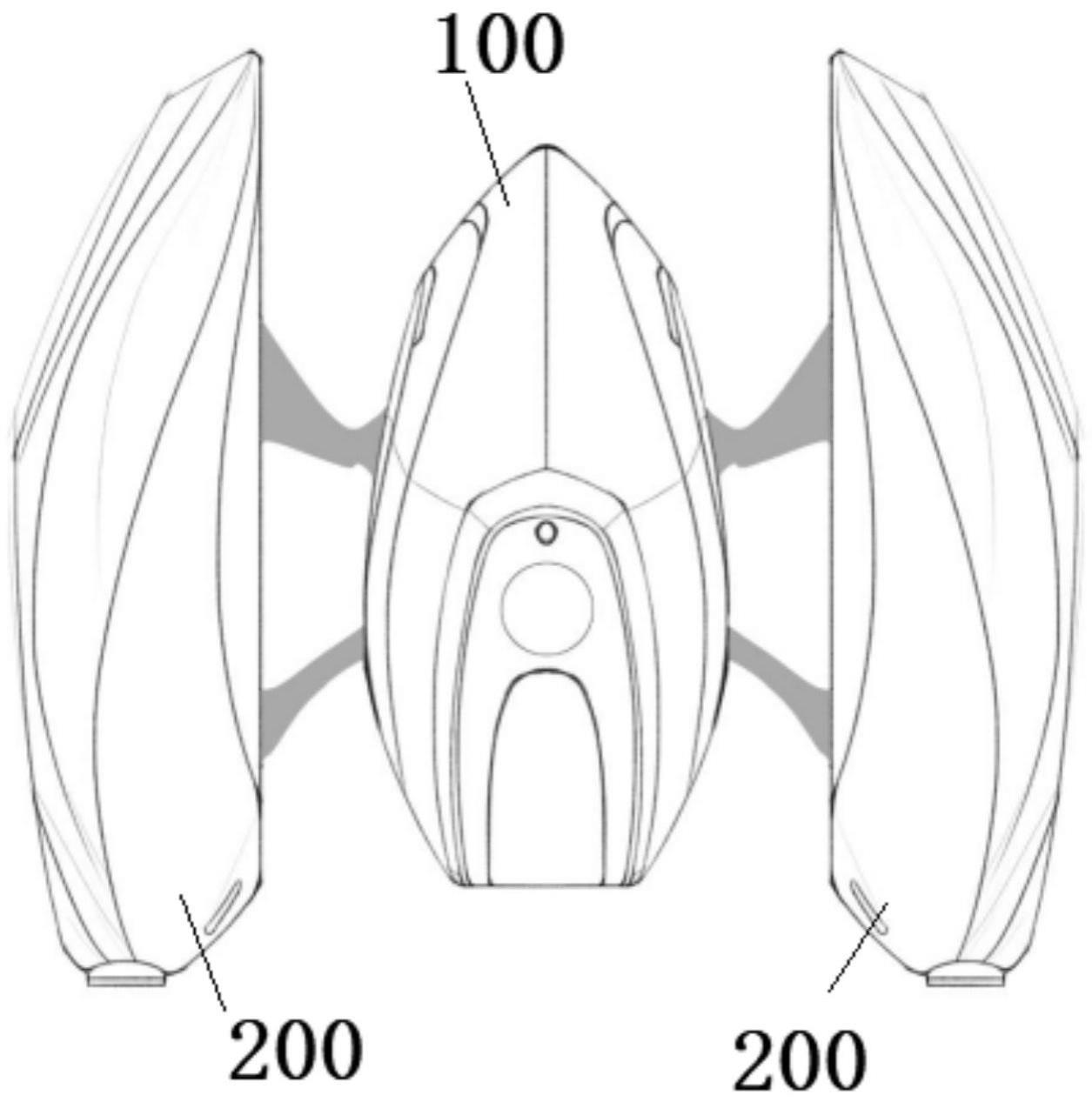
4、无人机船身,所述无人机船身两侧连接有舱体;
5、位于无人船机船身和\或舱体上的控制组件以及动力组件,且所述动力组件与所述控制组件通讯连接;
6、感知避障组件,所述感知避障组件用于采集无人船机船身和\或舱体周围的障碍物,并将采集到的障碍物信息发送至控制组件;
7、定位组件,所述定位组件获取无人机船身和\或舱体的位置信息,并与所述控制组件通讯连接;
8、操控组件,所述操控组件接受控制组件的指令,进而控制动力组件,操控并调整无人船机船身和\或舱体的行驶状态,所述行驶状态包括是否行驶、形式速度或形式方向中的一种;
9、通讯组件,所述通讯组件用于无人船机船身和\或舱体中采集数据以及控制组件与远程的终端设备之间的通讯。
10、作为本发明的进一步改进,所述感知避障组件通过环境监测组件,获取无人船机船身和\或舱体周围的环境参数,使得控制组件根据环境参数,进行避障路线设计。
11、作为本发明的进一步改进,所述环境监测至少包括ph值监测组件、电导率监测组件、溶解氧监测组件、浊度监测组件以及温度监测组件。
12、作为本发明的进一步改进,还包括位于无人船机船身和\或舱体上的图像采集组件,所述图像采集组件分别用于获取图像采集以及视觉应用。
13、作为本发明的进一步改进,还包括与控制组件通讯连接的遥控器,所述遥控器用于手动控制无人机船身,同时监控并显示系统状态。
14、作为本发明的进一步改进,所述控制组件具体为芯片组件,所述芯片组件上设有姿态数据解析单元、推进器运动控制单元以及处理遥控器指令的遥控器数据处理单元,所述推进器运动控制单元分别与推进器以及动力组件连接。
15、作为本发明的进一步改进,所述芯片组件为带有的python编写单元的nvidia芯片,所述nvidia芯片上搭载有ubuntu系统。
16、作为本发明的进一步改进,还包括任务荷载组件,所述任务荷载组件接受控制组件的指令,完成对应的任务。
17、作为本发明的进一步改进,所述任务荷载组件包括水质采样组件以及水质检测组件。
18、作为本发明的进一步改进,所述通讯组件为船外天线,所述船外天线包括5.8g全向8dbi天线两根,遥控器低频天线一根,gnss定位蘑菇天线一个。
19、本发明的有益效果如下:
20、本发明中,增加了智能感知避障,可以实现厘米级精确定位,确保无人船“指哪到哪”,无惧雨雾天气;本发明中的操控组件以及定位组件等,能够进行无人机船身、舱体以及同时监测无人机船身和舱体的效果,实现了针对各种组件的同时或单独监控,进而可以使得舱体单独作业于狭小空间等特殊的作业区域环境中。
技术特征:
1.一种水域自主导航监测无人船,其特征在于,包括,
2.根据权利要求1所述的一种水域自主导航监测无人船,其特征在于,所述感知避障组件通过环境监测组件,获取无人船机船身和\或舱体周围的环境参数,使得控制组件根据环境参数,进行避障路线设计。
3.根据权利要求2所述的一种水域自主导航监测无人船,其特征在于,所述环境监测至少包括ph值监测组件、电导率监测组件、溶解氧监测组件、浊度监测组件以及温度监测组件。
4.根据权利要求1所述的一种水域自主导航监测无人船,其特征在于,还包括位于无人船机船身和\或舱体上的图像采集组件,所述图像采集组件分别用于获取图像采集以及视觉应用。
5.根据权利要求4所述的一种水域自主导航监测无人船,其特征在于,还包括与控制组件通讯连接的遥控器,所述遥控器用于手动控制无人机船身,同时监控并显示系统状态。
6.根据权利要求5所述的一种水域自主导航监测无人船,其特征在于,所述控制组件具体为芯片组件,所述芯片组件上设有姿态数据解析单元、推进器运动控制单元以及处理遥控器指令的遥控器数据处理单元,所述推进器运动控制单元分别与推进器以及动力组件连接。
7.根据权利要求5所述的一种水域自主导航监测无人船,其特征在于,所述芯片组件为带有的python编写单元的nvidia芯片,所述nvidia芯片上搭载有ubuntu系统。
8.根据权利要求1所述的一种水域自主导航监测无人船,其特征在于,还包括任务荷载组件,所述任务荷载组件接受控制组件的指令,完成对应的任务。
9.根据权利要求8所述的一种水域自主导航监测无人船,其特征在于,所述任务荷载组件包括水质采样组件以及水质检测组件。
10.根据权利要求1所述的一种水域自主导航监测无人船,其特征在于,所述通讯组件为船外天线,所述船外天线包括5.8g全向8dbi天线两根,遥控器低频天线一根,gnss定位蘑菇天线一个。
技术总结
本发明涉及一种水域自主导航监测无人船,包括无人机船身,所述无人机船身两侧连接有舱体;位于无人船机船身和\或舱体上的控制组件以及动力组件,且所述动力组件与所述控制组件通讯连接;感知避障组件,用于采集无人船机船身和\或舱体周围的障碍物,并将采集到的障碍物信息发送至控制组件;定位组件,所述定位组件获取无人机船身和\或舱体的位置信息,并与控制组件通讯连接;操控组件,所述操控组件接受控制组件的指令,进而控制动力组件,操控并调整无人船机船身和\或舱体的行驶状态,所述行驶状态包括是否行驶、形式速度或形式方向中的一种;通讯组件,用于无人船机船身和\或舱体中采集数据以及控制组件与远程的终端设备之间的通讯。
技术研发人员:王清艺,种睿韬,纪峰,王俊东,董浩然,赵菲
受保护的技术使用者:陕西环保产业创新中心有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!