一种以钢丝绳感知船舶相对运动的波浪补偿舷梯的制作方法
本发明涉及一种适用于补给船、人员运输船、救捞船乃至于普通商船等需海上进行人员转运作业的船舶,尤其是一种用于一定海况下的海上人员转运的舷梯。
背景技术:
1、1.海上人员转运是指从搭载登乘设备的船(以下简称“母船”)向另一艘船(以下简称“它船”)输送和接收人员的作业方式,两船一般应先完成靠帮再进行人员转运。
2、2.船舶普遍搭载的登乘设备包括舷梯、引水员软梯和跳板,其中舷梯和引水员梯用于两船干舷差较大的情况,而跳板仅能用于两船干舷差距不大的情况;在高海况下,舷梯下平台搭设在它船之上易受两船之间的运动影响使舷梯受损,同时也影响登乘人员安全;因此如需高海况下进行人员转运,则一般通过引水员软梯完成,但是这种登乘方式危险系数高,对登船人员的身体素质要求较高。
3、3.目前在高海况下两船之间人员换乘没有简单的解决船舶波浪运动的方案。海上解决人员或物品因船舶波浪运动而转运困难的方案主要有两个:一是在类似风电安装船上设置波浪补偿步桥与海上风电平台对接后进行人员转运,但是这种方案占用的体积大,波浪补偿采用运动姿态传感器感知运动输入,采购成本高,可以参考专利公开号cn114872837a公开的一种波浪补偿舷梯系统及其控制方法;二是在海工作业中广泛使用的波浪补偿吊机,其采用的也是运动姿态传感器感知运动输入,采购成本也很高,而且采用吊运方式进行人员转运的话吊机需要作为吊人吊机来取证,船检检验程序复杂,设计、建造成本也会剧增。
4、4.专利公开号cn108045509a公开的一种具有波浪补偿功能的回转伸缩舷梯,但是该专利仅阐述了在机械结构上如何进行补偿而并未说明补偿的信号输入如何获得,在全面性上也欠妥。所以仍然没有解决高海况下两船靠帮的人员转运问题。
5、综上所述,在海上进行两船之间人员转运缺乏一种体积小、成本低、系统简单的解决方案。现有的解决方案体积大、成本低、系统复杂。
6、目前各种海上人员转运方式均存在各种不足,相比较而言舷梯的占用体积适中,人员转运效率较高,可以适应干舷差较大的船舶之间进行人员转运。但是常规舷梯转运人员也面临以下几个问题:
7、1.舷梯安装在母船上,放出舷梯后舷梯下平台和它船之间需尽可能近,否则它船人员在登上母船过程中迈上下平台会非常吃力,但是它船和母船都在波浪中运动,舷梯下平台难免会和它船甲板相撞,因此希望舷梯具备波浪补偿功能,也即舷梯下平台随它船的上下起伏而同步上下起伏,尽量保证舷梯下平台与它船甲板之间保持等间隙。
8、2.两船之间并靠进行人员转运与向海洋平台转运有所不同,在转运工况下海洋平台在波浪中的运动相对较小,有些固定式、自升式平台甚至没有运动。而两船并靠期间两船均在波浪中有运动响应,需要至少两个运动姿态传感器分别检测母船和它船的运动,并求解出相对位置反馈给母船上的登乘设备进行补偿,这种方案虽然可以获得比较高的精度,但是复杂性高、可靠性低,并不适合大面积推广。
9、3.海洋工程中常用的波浪补偿步桥虽然已投入使用,但是还是存在问题:一是塔和桥结合的设计方法导致整个系统体积非常庞大,自重非常重,仅适合在专用船/平台上进行布置,不适用于大部分船舶;二是整套系统造价昂且更倾向于人员换乘频次很高的情况,与大部分用船需求及采购能力也不匹配。
10、4.排水量稍大的两船并靠期间两船之间并非紧密无间隙的,一般会设置碰垫,但是常规舷梯在舷外作业时一般是紧靠母船船舷的,这样常规舷梯就很难适用于排水量稍大的船舶之间进行人员转运。
11、5.两船之间并靠进行人员转运需要追求一定的效率,需要舷梯处人员快速排队通过,没有流量限制,不可进行长时间等待,因此对舷梯及其支撑系统的强度提出了很高的要求。
技术实现思路
1、为解决常规舷梯的技术问题,同时又避免波浪补偿步桥体积大、成本高、系统复杂的缺陷,本发明提出一种在常规舷梯的基础上改进而成的以钢丝绳感知船舶相对运动的波浪补偿舷梯。
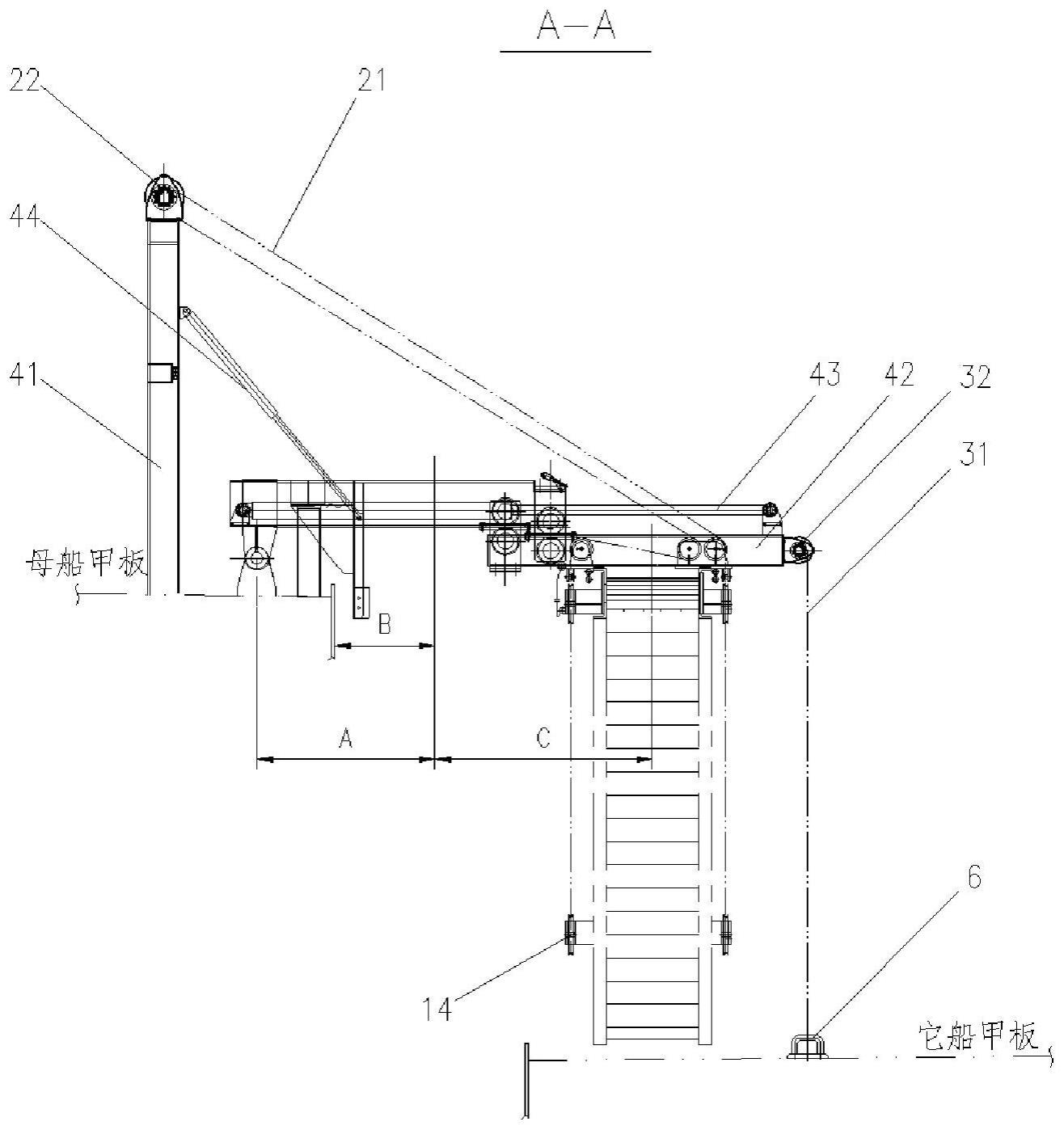
2、为实现上述目的,本发明的技术方案是:一种以钢丝绳感知船舶相对运动的波浪补偿舷梯,包含常规舷梯梯架总成、波浪补偿主绞车、辅助感应绞车、伸缩式翻梯装置,伸缩式翻梯装置上安装波浪补偿主绞车和辅助感应绞车,在使用过程中伸缩式翻梯装置翻至舷外并通过伸缩使常规舷梯梯架总成的梯架外移至所需的位置,将其上的辅助感应绞车钢丝绳固定至它船甲板上兼顾位置,辅助感应绞车通过钢丝绳的松紧感应两船之间甲板高度差的变化情况,并将计算后的补偿速度参数输入给波浪补偿主绞车,波浪补偿主绞车根据输入参数驱动常规舷梯总成上下运动,能够保障常规舷梯总成的下平台和它船之间一直自动保持合理高度,实现波浪补偿功能。
3、进一步,常规舷梯总成包括上平台、梯架、下平台和滑轮组,上平台是舷梯和母船连接的纽带,梯架则是人员上下的梯道,而下平台是登上它船的最后一级平台也是它船登上舷梯的第一个平台,滑轮组用于钢丝绳导向,且该钢丝绳能驱动常规舷梯总成上下运动。
4、进一步,波浪补偿主绞车包括主钢丝绳和主绞车本体,其中主钢丝绳通过滑轮组绕过常规舷梯总成,并对常规舷梯总成起到驱动其上下的功能。
5、进一步,波浪补偿主绞车利用钢丝绳绕过常规舷梯总成上的滑轮组,接收到辅助感应绞车的运动指令后根据算法收放钢丝绳,使常规舷梯总成上下运动。
6、进一步,辅助感应绞车包括辅钢丝绳和辅助绞车本体,在伸缩式翻梯装置翻出舷外之后,辅钢丝绳连接到它船甲板上的坚固物后开始工作。
7、进一步,辅助感应绞车的钢丝绳连接它船上的坚固位置后保持辅助感应绞车的钢丝绳张力不变,通过恒张力功能不断随波浪收放钢丝绳并记录其收放速度并向波浪补偿主绞车实时发布运动指令。
8、进一步,当辅钢丝绳和下平台的位置接近时,辅钢丝绳处感知得到的钢丝绳缆长度变化即等于下平台位置所需补偿的高度变化值。
9、进一步,伸缩式翻梯装置包括固定臂、活动臂、伸缩油缸和摆动油缸,固定臂固定在母船甲板上,并通过摆动油缸铰接伸缩油缸,伸缩油缸连接活动臂。
10、一种以钢丝绳感知船舶相对运动的波浪补偿舷梯的使用方法,其步骤为:(1)两船并靠用带缆固定后驱动伸缩油缸将常规舷梯总成由竖直位置翻转到水平位置,主绞车本体从动放绳;
11、(2)伸缩油缸维持不动,主绞车本体主动放绳,将梯架逐步下放到倾斜位置,使下平台距离它船甲板在允许的范围内,并使梯架和水平面的夹角不大于55°,记录此时放出的绳长ls;
12、(3)辅助绞车本开始释放辅钢丝绳其与它船上的坚固物连接,连接完成后驱动辅助绞车本体使辅钢丝绳张紧,保持张力到设定值并开启恒张力功能;
13、(4)观察辅助绞车本体恒张力功能稳定运行且能够向系统输出绞车的收放速度v3,此时选择开启波浪补偿功能;
14、(5)主绞车本体收到波浪补偿指令后根据辅钢丝绳的收放速度v3和初始绳长ls或者初始下倾角θ作为输入,根据既定算法求出波浪补偿主绞车本体的工作速度v2进行波浪补偿工作;
15、(6)作业完成后关闭波浪补偿功能,先回收一些主钢丝绳,然后解开辅钢丝绳和坚固物之间的连接,继续回收主钢丝绳,使标准梯架回到水平位置。
16、(7)随后回收伸缩油缸到最内侧位置,再利用摆动油缸回收活动臂,使梯架随之竖起,最后利用紧固装置紧固梯架即可。
17、进一步,既定算法包括:设舷梯的翻转机构中线到上半台与梯架连接铰链的水平距离为l1,开启波浪补偿时主绞车和梯架的连线长度l2,开启波浪补偿时,梯架初始下倾角为θ,通过求三角形,根据放出的钢丝绳长度算出l2再计算出θ,
18、
19、设舷梯下平台位置的垂向速度为v1,即目标补偿工作速度,辅助感应绞车测得的它船平台位置垂向相对速度为v3,梯架总长为l3,则有:
20、
21、设波浪补偿主绞车的驱动速度为v2,滑轮组的动滑轮系数为λ,则实际绞车钢丝绳和梯架连接点处沿钢丝绳方向的运动速度为v2/λ,对于只有一级动滑轮的滑轮组,λ=2;
22、求得波浪补偿主绞车的驱动速度v2与辅助感应绞车监测得到的速度v3之间的关系为:
23、
24、令称之为几何系数,则有:
25、v2=v3·λ·k
26、由此计算出波浪补偿主绞车本体的工作速度v2。
27、本发明的有益效果是:
28、1.本发明基于常规舷梯的基础上改进而来,保留了常规舷梯体积小、成本低、系统简单的优点,同时又使其可以适应更高的海况。
29、2.本发明解决了两船靠帮后需要使用舷梯进行人员转运的情况下,因两船在波浪中的运动响应不一致导致舷梯下平台与它船甲板之间间隙变化剧烈可能造成安全事故的问题。
30、3.本发明利用绞车牵引的钢丝绳传递两船甲板之间的高度差变化,并以此为输入信息驱动主绞车收放缆,避免了在母船和它船两条船的甲板上安装运动姿态传感器再通过复杂的数学计算求解出高度差变化的过程。
31、4.本发明可以使舷梯向舷外方向旋转部分角度使其可以兼容靠帮时两船之间的不同间隙。
32、5.本发明的翻转机构伸缩装置为液压油缸驱动,所以本发明中的所有绞车既可以选择常规的电动绞车,也可以选择液压绞车。
33、6.本发明的梯架设计和翻梯装置的受力部分设计和常规舷梯无异,不影响其正常的负载水平。
34、7.本发明的翻梯装置的翻转运动使用油缸驱动而非常规舷梯的绞车连带驱动方案,可以使绞车布置更合理,更专注于发挥波浪补偿功能。同时省去了甲板面上的大量钢丝绳,使布置更简洁。
35、8.本发明的翻梯装置和梯架总成与常规舷梯类似,每级踏步可承受735n的载荷,满足人员大流量上下舷梯的要求。
36、9.本发明使用的绞车、油缸等零部件都是船舶行业常用的露天设备,没有使用高精度传感器等精密仪器,因此具有更高的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!