基于胸鳍升潜结构的仿生机器鱼水下对接方法
本发明涉及的是一种仿生机械控制领域的技术,具体是一种基于胸鳍升潜结构的仿生机器鱼水下对接方法。
背景技术:
1、现有水下回收方式主要以对接为主,对接方式可分为以绳索、杆类为对接目标的捕捉式对接方式,以圆锥导向罩和笼箱类为对接目标的包容式对接方式以及以水下平台为对接目标的落座式对接方式。这三种对接方式设计对象为水下无人航行器,对仿生机器鱼的适配性低。主要原因为:这几种水下对接方法虽然能够实现仿生机器鱼的对接,但都存在容易受海流影响,装置复杂,对仿生机器鱼需要做较大改动的缺点。现有技术未有专门针对仿生机器鱼设计的水下对接方法。
技术实现思路
1、本发明针对现有技术无法实现垂直升潜,不能为吸附提供足够的预紧力的不足,提出一种基于胸鳍升潜结构的仿生机器鱼水下对接方法,该方法控制简单、能耗小、适配性强。
2、本发明是通过以下技术方案实现的:
3、本发明涉及一种基于胸鳍升潜结构的仿生机器鱼水下对接方法,通过胸鳍上、下摆动过程中分别产生的垂直于胸鳍面的阻力差,控制仿生机器鱼的垂直上升或下降,在对接时控制仿生机器鱼垂直上升至水下航行器的底部并进一步产生预紧力,使得仿生机器鱼的真空吸盘与水下航行器底部充分接触后,将真空吸盘内水排出实现水下对接;在脱离时,向真空吸盘内注水消除内外压力差并控制仿生机器鱼垂直下降,实现仿生机器鱼与水下航行器的脱离。
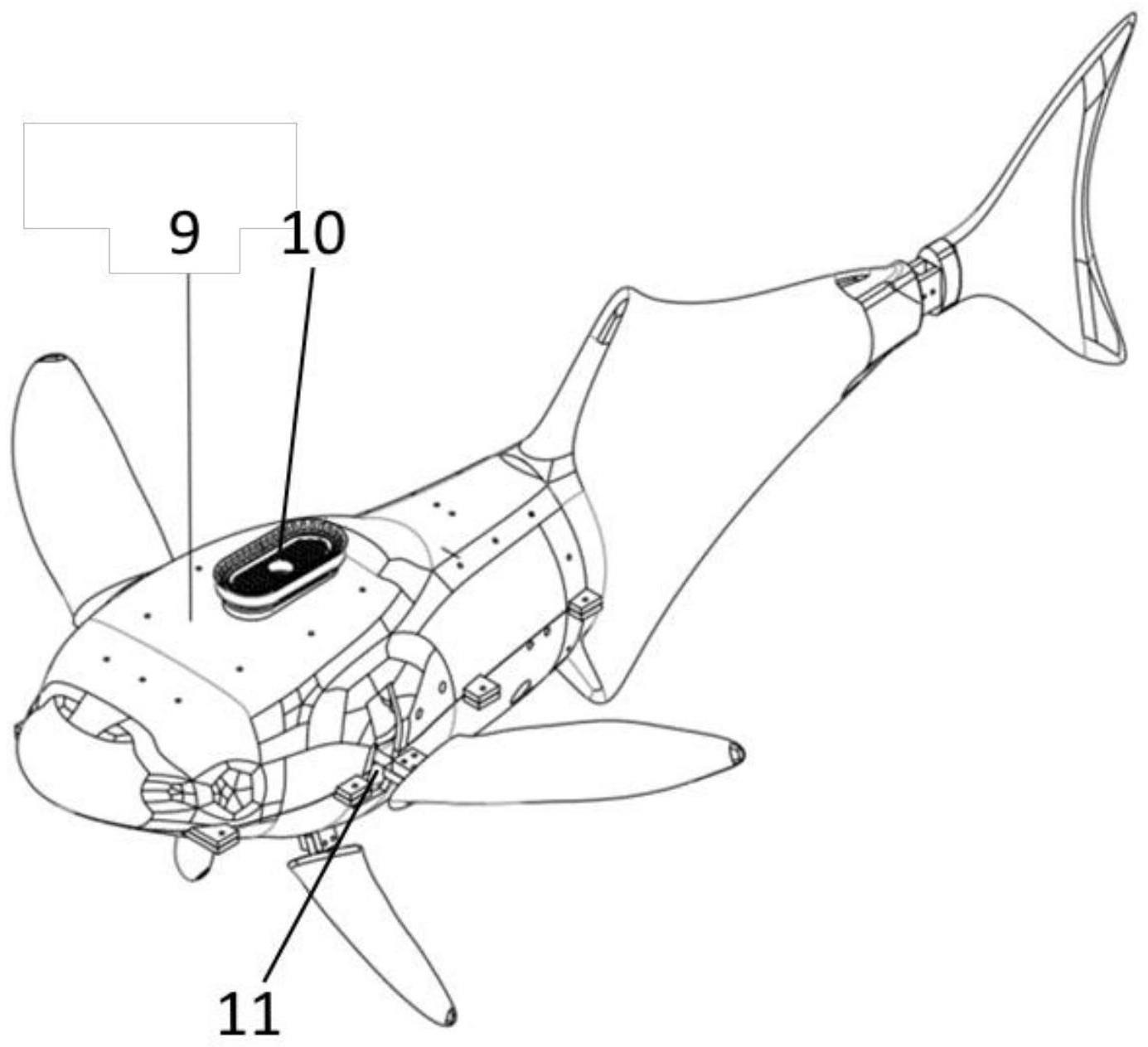
4、所述的仿生机器鱼上设有:用于提供吸力的吸附装置和用于提供垂直升潜力的胸鳍升潜装置,其中:吸附装置和胸鳍升潜结构呈上下分布,两者配合可实现仿生机器鱼的吸附脱离。
5、所述的垂直于胸鳍面的阻力差是指:当胸鳍上摆动,即上冲程和下摆动,即下冲程的速度不同时,上、下冲程中产生的垂直于胸鳍面不同大小的力分解后得到垂直方向和水平方向的力,水平方向力相互抵消,由垂直方向力充当升潜力。具体地:当下冲程的速度大于上冲程时,胸鳍在一个周期的合力为上浮力,实现垂直上升;当下冲程速度小于上冲程时,胸鳍在一个周期内的合力为下降力,实现垂直下降。
6、技术效果
7、本发明采用基于扑翼理论的胸鳍升潜结构和真空式吸盘的吸附方法,控制简单,仅需控制水泵和两个伺服电机即可实现仿生机器鱼的水下对接;只需小功率驱动水泵工作即可保持吸附动作,依靠仿生机器鱼吸附于对接平台跟随平台运动,可大大减小仿生机器鱼水下工作能耗,使仿生机器鱼能够配合海洋航行器更好的完成对应的工作任务;适配性强,该装置可应用于大部分仿生机器鱼且无需仿生机器鱼做出较大改动。
技术特征:
1.一种基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征在于,通过胸鳍上、下摆动过程中分别产生的垂直于胸鳍面的阻力差,控制仿生机器鱼的垂直上升或下降,在对接时控制仿生机器鱼垂直上升至水下航行器的底部并进一步产生预紧力,使得仿生机器鱼的真空吸盘与水下航行器底部充分接触后,将真空吸盘内水排出实现水下对接;在脱离时,向真空吸盘内注水消除内外压力差并控制仿生机器鱼垂直下降,实现仿生机器鱼与水下航行器的脱离;
2.根据权利要求1所述的基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征是,所述的仿生机器鱼上设有:用于提供吸力的吸附装置和用于提供垂直升潜力的胸鳍升潜装置,其中:吸附装置和胸鳍升潜结构呈上下分布,两者配合可实现仿生机器鱼的吸附脱离。
3.根据权利要求2所述的基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征是,所述的胸鳍升潜装置包括:设置于仿生机器鱼内的胸鳍舵机支架以及固定设置于其上的一对胸鳍舵机,其中:胸鳍舵机通过对应的胸鳍连接件分别与左、右胸鳍相连。
4.根据权利要求3所述的基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征是,所述的胸鳍舵机在一个周期内运动规律满足:
5.根据权利要求3所述的基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征是,所述的胸鳍舵机为防水数字舵机,其输出角度规律为正弦函数,驱动胸鳍绕胸鳍舵机5输出轴在垂直面做扇形运动。
6.根据权利要求3所述的基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征是,所述的胸鳍连接件一端为圆形,另一端为方形,方形一端分别连接左胸鳍和右胸鳍。
7.根据权利要求3或6所述的基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征是,所述的左胸鳍和右胸鳍以鮣鱼胸鳍为原型以产生较大的上浮力和下降力。
8.根据权利要求2所述的基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征是,所述的吸附装置包括:依次相连的真空吸盘、吸盘连接管和水泵,其中:真空吸盘为椭圆双层柔性吸盘,内部有两层腔体,腔体内部平面有突出小方柱以增加吸附力。
9.根据权利要求8所述的基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征是,所述的真空吸盘底部有圆形开孔以固定于仿生机器鱼顶部和连接吸盘连接管。
10.根据权利要求8所述的基于胸鳍升潜结构的仿生机器鱼水下对接方法,其特征是,所述的水泵呈圆柱形结构,其顶部设有圆筒形的吸水口,圆柱侧面有直径稍小的圆筒形出水口,通过内部电机工作实现单向排水。
技术总结
一种基于胸鳍升潜结构的仿生机器鱼水下对接方法,通过胸鳍上、下摆动过程中分别产生的垂直于胸鳍面的阻力差,控制仿生机器鱼的垂直上升或下降,在对接时控制仿生机器鱼垂直上升至水下航行器的底部并进一步产生预紧力,使得仿生机器鱼的真空吸盘与水下航行器底部充分接触后,将真空吸盘内水排出实现水下对接;在脱离时,向真空吸盘内注水消除内外压力差并控制仿生机器鱼垂直下降,实现仿生机器鱼与水下航行器的脱离。本发明控制简单、能耗小、适配性强。
技术研发人员:乔磊,谭桐,于林,张睿逸,王旭阳
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!