无人船碰撞的自处理方法、无人船及存储介质与流程
本申请属于无人船事故处理,特别是涉及一种无人船碰撞的自处理方法、无人船及存储介质。
背景技术:
1、随着无人船技术的发展,无人船艇在货物运输、水域勘测、海上救援等领域都得到了广泛应用。但是由于缺少人工干预,无人船艇在海上航行时常面临多种风险,其中碰撞事故的发生会严重威胁到无人船艇及周边海域的航行安全。
2、为了避免碰撞事故带来的恶劣后果,现有的解决方案通常是使无人船艇实现提前识别进而规避碰撞风险,而碰撞发生后的事故处理过程仍然主要依靠人工,通过相关人员实施应急处理,拖延了事故的最佳处理时间,可能会使碰撞事故进一步恶化,引发更严重的后续事故。
3、因此,如何设计出一种无人船发生碰撞后自主进行应急处理的方法成为目前亟待解决的问题。
技术实现思路
1、本申请的目的在于提供一种无人船碰撞的自处理方法,能够满足在无人工支持的条件下自主采取措施应急处理船舶碰撞事故。
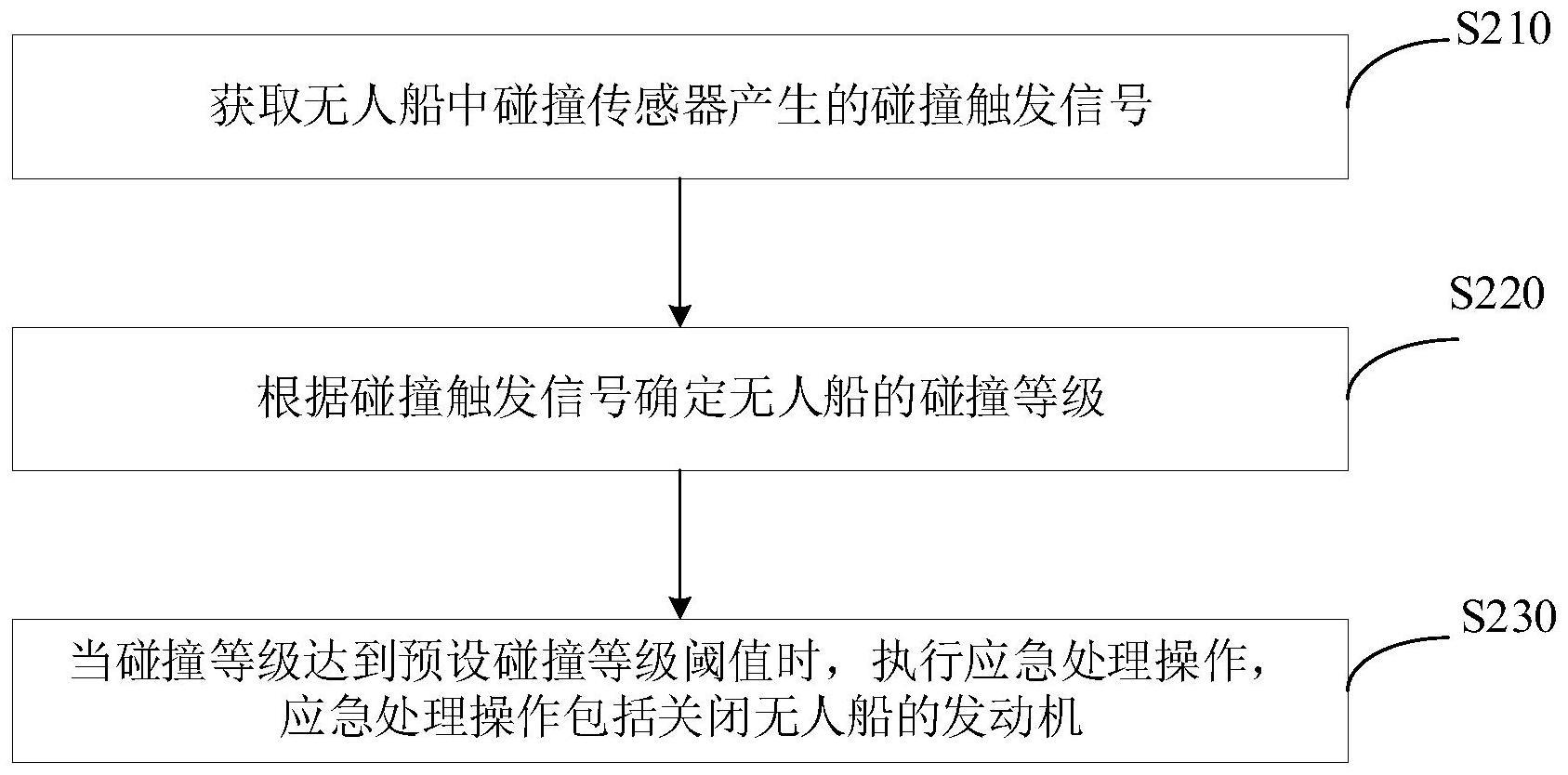
2、第一方面,本申请实施例提供了一种无人船碰撞的自处理方法,该方法包括:获取无人船中碰撞传感器产生的碰撞触发信号;根据碰撞触发信号确定无人船的碰撞等级;当所述碰撞等级达到预设碰撞等级阈值时,执行应急处理操作,应急处理操作包括控制关闭无人船的发动机。
3、在第一方面的一种可能的实现方式中,应急处理操作还包括向应急中心发送包含无人船的定位信息的碰撞警报。
4、通过发送碰撞警报的方式向岸上人员警报碰撞事故,使得碰撞事故得到更加妥善、周密的处理。
5、在第一方面的一种可能的实现方式中,应急处理操作还包括启动故障警示,故障警示用于警示其他船只避让无人船;故障警示包括:将船舶自动识别系统ais的发送状态更改为船舶故障抛锚;和/或,控制开启船舶故障信号灯。
6、启动船舶的故障警示,警示其他船舶注意事故发生而主动避让,有效避免二次事故的发生。
7、在第一方面的一种可能的实现方式中,应急处理操作还包括将事故记录进行存储,事故记录包括碰撞发生过程中无人船的航行轨迹和/或碰撞发生过程中无人船的监控视频。
8、通过保存无人船的航行轨迹和监控视频实现了对碰撞事故的完整记录,为人员介入后对事故的分析与处理提供了参考。
9、在第一方面的一种可能的实现方式中,当上述无人船的发动机被关闭后,上述方法还包括:当检测到船内进水时,控制启动排水装置进行排水处理。
10、在第一方面的一种可能的实现方式中,当上述无人船的发动机被关闭后,上述方法还包括:当检测到船内着火时,控制启动灭火装置进行灭火处理。
11、在第一方面的一种可能的实现方式中,当上述无人船的发动机被关闭后,上述方法还包括:当检测到燃油泄漏时,控制关闭燃油阀门。
12、在第一方面的一种可能的实现方式中,上述方法还包括:将执行应急处理操作生成的操作日志进行存储。
13、第二方面,本申请实施例提供了一种无人船碰撞的自处理装置,该装置包括:获取单元,用于获取无人船中碰撞传感器产生的碰撞触发信号;处理单元,用于根据碰撞触发信号确定无人船的碰撞等级;处理单元还用于,当碰撞等级达到预设碰撞等级阈值时,执行应急处理操作,应急处理操作包括控制关闭无人船的发动机。
14、第三方面,本申请实施例提供了一种无人船,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,当处理器执行所述计算机程序时使得无人船实现如上述第一方面和第二方面中任一实现方式。
15、第四方面,本申请实施例提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,当计算机程序被无人船执行时实现如上述第一方面和第二方面中任一实现方式。
16、第五方面,本申请实施例提供了一种计算机程序产品,当计算机程序产品在无人船上运行时,使得无人船执行上述第一方面中任一项所述的实现方式。
17、本申请实施例与现有技术相比存在的有益效果是:本申请提出的一种无人船碰撞应急处理方法,通过碰撞传感器受触发而产生的碰撞触发信号判断无人船的碰撞情况,并根据该碰撞情况自主确定执行应急处理措施,在碰撞发生后自动关闭发动机以避免二次事故的发生,实现在无人工干预的条件下对碰撞事故的及时响应,有效避免因得不到及时处理使得事故进一步扩大化,切实保障了碰撞后无人船只的安全性和稳定性。
技术特征:
1.一种无人船碰撞的自处理方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述应急处理操作还包括向应急中心发送包含所述无人船的定位信息的碰撞警报。
3.根据权利要求1所述的方法,其特征在于,所述应急处理操作还包括启动故障警示,所述故障警示用于警示其他船只避让所述无人船;所述故障警示包括:将船舶自动识别系统ais的发送状态更改为船舶故障抛锚;和/或,控制开启船舶故障信号灯。
4.根据权利要求1所述的方法,其特征在于,所述应急处理操作还包括将事故记录进行存储,所述事故记录包括碰撞发生过程中所述无人船的航行轨迹和/或碰撞发生过程中所述无人船的监控视频。
5.根据权利要求1至4中任一项所述的方法,其特征在于,当所述无人船的发动机被关闭后,所述方法还包括:
6.根据权利要求1至4中任一项所述的方法,其特征在于,当所述无人船的发动机被关闭后,所述方法还包括:
7.根据权利要求1至4中任一项所述的方法,其特征在于,当所述无人船的发动机被关闭后,所述方法还包括:
8.根据权利要求1至4中任一项所述的方法,其特征在于,所述方法还包括:
9.一种无人船,其特征在于,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时使得所述无人船实现如权利要求1至8任一项所述的方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被电子设备执行时实现如权利要求1至8任一项所述的方法。
技术总结
本申请适用于无人船事故处理技术领域,提供了一种无人船碰撞的自处理方法,包括:获取无人船中碰撞传感器产生的碰撞触发信号;根据碰撞触发信号确定无人船的碰撞等级;当碰撞等级达到预设碰撞等级阈值时,执行应急处理操作,应急处理操作包括控制关闭无人船的发动机。上述方法,可以使得无人船通过获取到的碰撞触发信号判断碰撞情况,并自主确定执行相应的应急处理措施,在碰撞发生后自动关闭发动机以避免二次事故的发生,实现在无人工干预的条件下对碰撞事故的立即响应,切实提高了碰撞后无人船只的稳定性和安全性。
技术研发人员:李小龙,郑程宾,张云飞,何志杰,吕维剑,胡宇辰,覃敏雄,陈科雄
受保护的技术使用者:珠海云洲智能科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!